1. PnP + LM 的优化目标函数
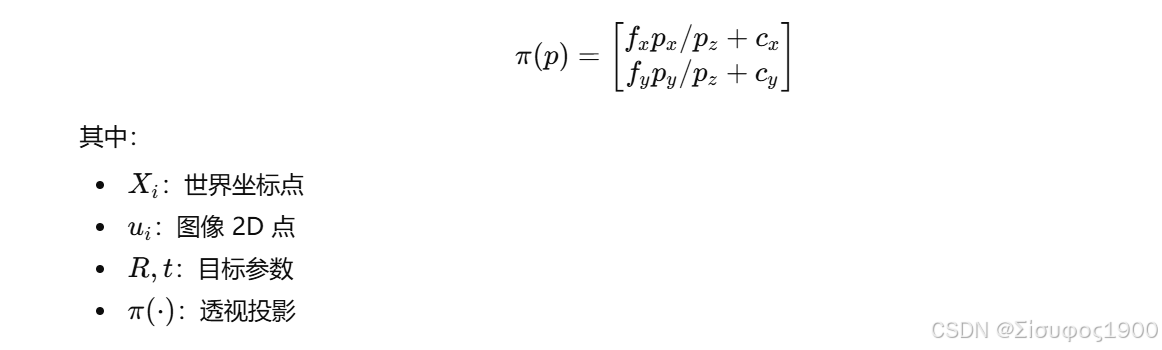
我们要优化 姿态 (R,t),使重投影误差最小:

投影模型:
2. LM 在 PnP 中的迭代公式
LM 的通式:
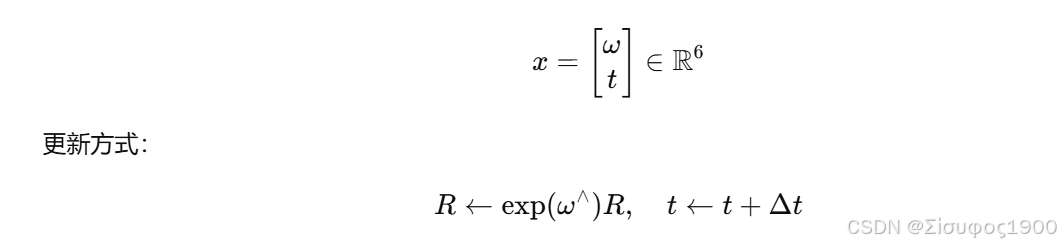
 PnP 的参数向量 用最小参数化的李代数 se(3):
PnP 的参数向量 用最小参数化的李代数 se(3):
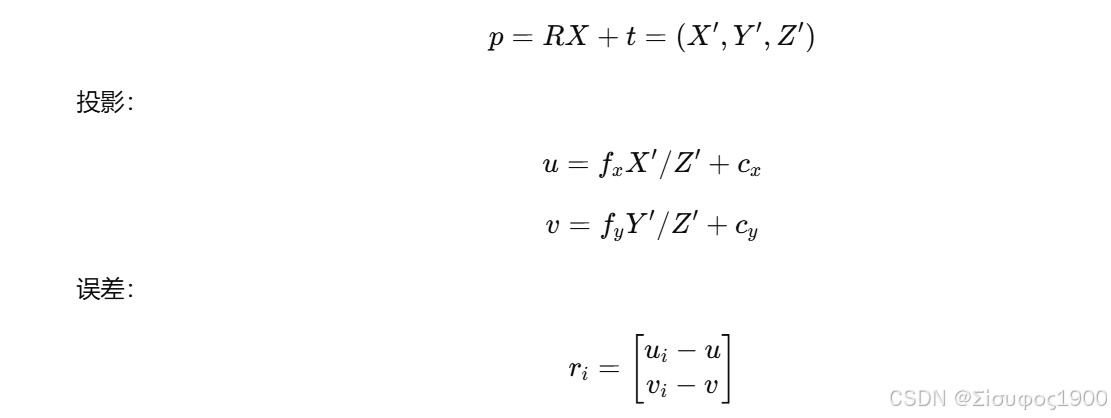
3. 重投影误差 Jacobian(核心推导)
对每个点:
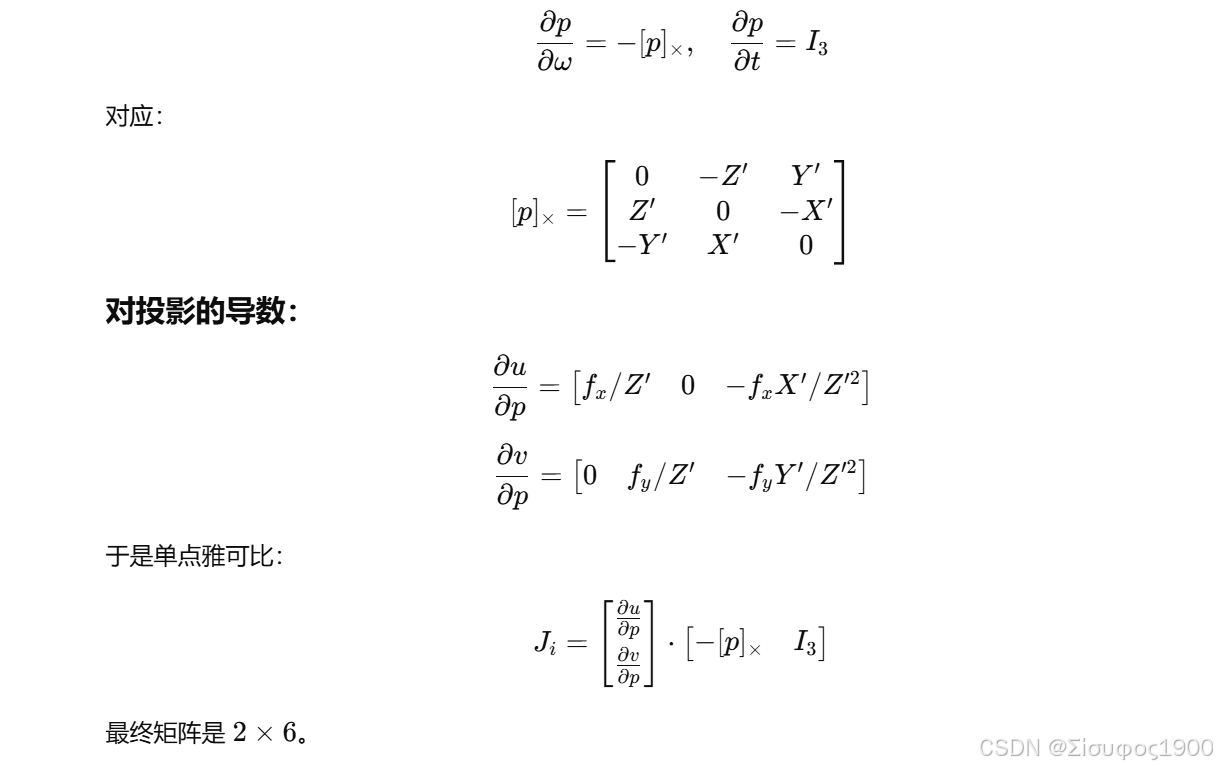
对p=RX+t 的导数:
位姿的雅可比(李代数):
4. MATLAB ------ EPnP + LM
功能:
-
生成或读取匹配点
-
用 EPnP 求初值
-
使用 LM 优化相机位姿
-
输出 R,t
-
重投影误差下降明显
cs
function [R, t] = pnp_LM(Xw, x2d, K)
% Xw: Nx3 3D points
% x2d: Nx2 image points
% K: intrinsic matrix
%% ---------- Step 1: EPnP 获取初始姿态 ----------
[R, t] = efficient_pnp(Xw, x2d, K);
% 你可以换成自己的 EPnP;这里只是一个实现接口
%% ---------- Step 2: LM 优化 ----------
maxIter = 20;
lambda = 1e-3;
for iter = 1:maxIter
r = []; % residual vector
J = []; % full Jacobian
for i = 1:size(Xw,1)
Xi = Xw(i,:)';
% ---- transform ----
Pc = R * Xi + t;
Xp = Pc(1); Yp = Pc(2); Zp = Pc(3);
% ---- projection ----
u = K(1,1)*Xp/Zp + K(1,3);
v = K(2,2)*Yp/Zp + K(2,3);
% ---- residual ----
ri = [x2d(i,1) - u;
x2d(i,2) - v];
r = [r; ri];
% ---- Jacobian wrt p = (X',Y',Z') ----
du_dp = [K(1,1)/Zp, ...
0, ...
-K(1,1)*Xp/Zp^2];
dv_dp = [0, ...
K(2,2)/Zp, ...
-K(2,2)*Yp/Zp^2];
J_proj = [du_dp; dv_dp]; % 2x3
% ---- Jacobian wrt pose (omega, t) ----
px = Pc;
px_hat = [ 0, -px(3), px(2);
px(3), 0, -px(1);
-px(2), px(1), 0 ];
J_se3 = [ -px_hat, eye(3) ]; % 3x6
Ji = J_proj * J_se3; % 2x6
J = [J; Ji];
end
% ---- LM step ----
H = J' * J;
g = J' * r;
delta = -(H + lambda * eye(6)) \ g;
% ---- Update pose using Lie algebra ----
omega = delta(1:3);
dt = delta(4:6);
% SO(3) 更新
R = expSO3(omega) * R;
% 平移更新
t = t + dt;
% 减少 lambda(如果误差下降)
new_r = compute_residual(Xw, x2d, R, t, K);
if norm(new_r) < norm(r)
lambda = lambda / 10;
else
lambda = lambda * 10;
end
fprintf("Iter %d, reprojection error = %.6f\n", iter, norm(new_r));
end
end
%% ======== 工具函数:SO(3) 指数映射 ========
function R = expSO3(w)
theta = norm(w);
if theta < 1e-12
R = eye(3); return;
end
k = w / theta;
K = [0 -k(3) k(2);
k(3) 0 -k(1);
-k(2) k(1) 0];
R = eye(3) + sin(theta)*K + (1-cos(theta))*K*K;
end
%% ======== 工具函数:计算重投影误差 ========
function r = compute_residual(Xw, x2d, R, t, K)
r = [];
for i = 1:size(Xw,1)
Pc = R*Xw(i,:)' + t;
Xp = Pc(1); Yp = Pc(2); Zp = Pc(3);
u = K(1,1)*Xp/Zp + K(1,3);
v = K(2,2)*Yp/Zp + K(2,3);
r = [r; x2d(i,1)-u; x2d(i,2)-v];
end
end使用;
cpp
% 生成测试
Xw = rand(20,3)*5;
R_gt = eye(3);
t_gt = [0; 0; 5];
K = [800 0 320;
0 800 240;
0 0 1];
% 投影生成 2D 点
x2d = zeros(20,2);
for i = 1:20
Pc = R_gt * Xw(i,:)' + t_gt;
x2d(i,1) = 800*Pc(1)/Pc(3) + 320;
x2d(i,2) = 800*Pc(2)/Pc(3) + 240;
end
% 启动 PnP-LM
[R, t] = pnp_LM(Xw, x2d, K)| 算法 | 稳定性 | 精度 | 是否需要初值 |
|---|---|---|---|
| P3P | 中 | 中 | 不需要 |
| EPnP | 强 | 中等 | 不需要 |
| EPnP + LM | 最强 | 最高 | EPnP 初值 |