1 按照第一集的部署完成后,我们就开始考虑给小龙虾增加telegram机器人和搜索网站能力,实现效果如下:
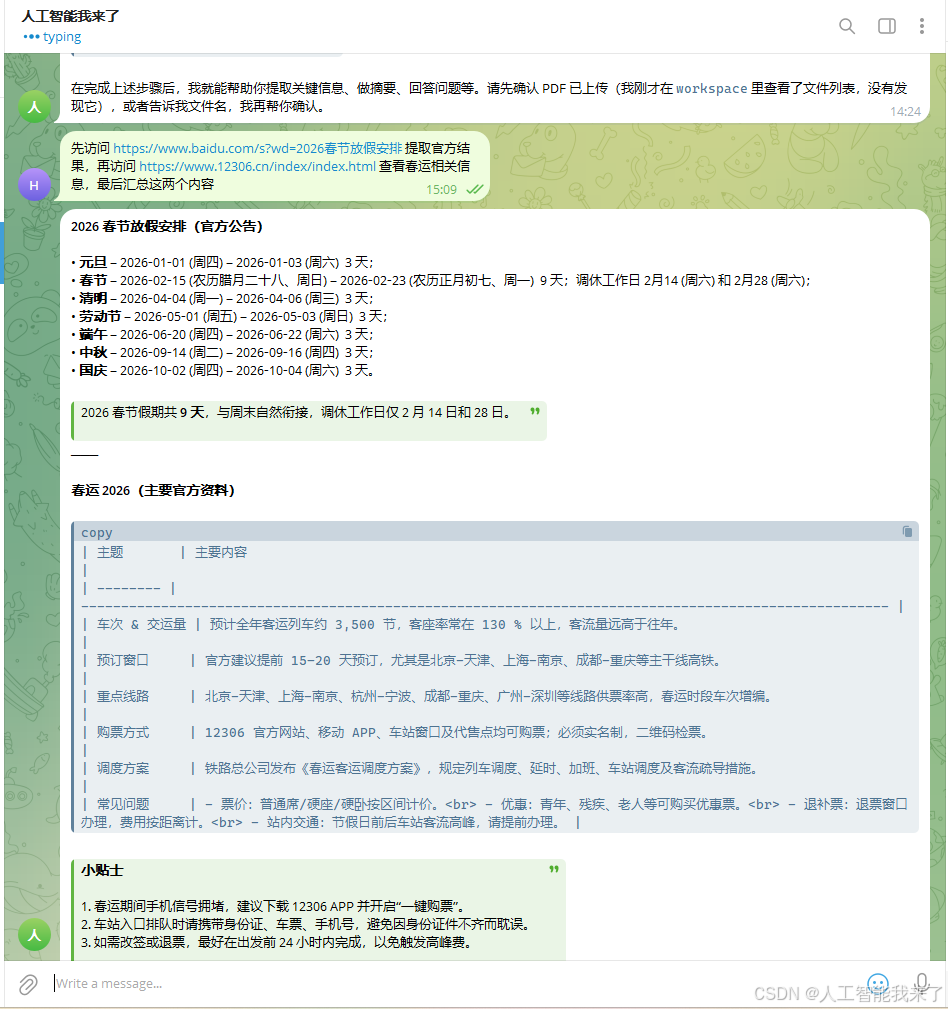
2 telegram机器人能力部署
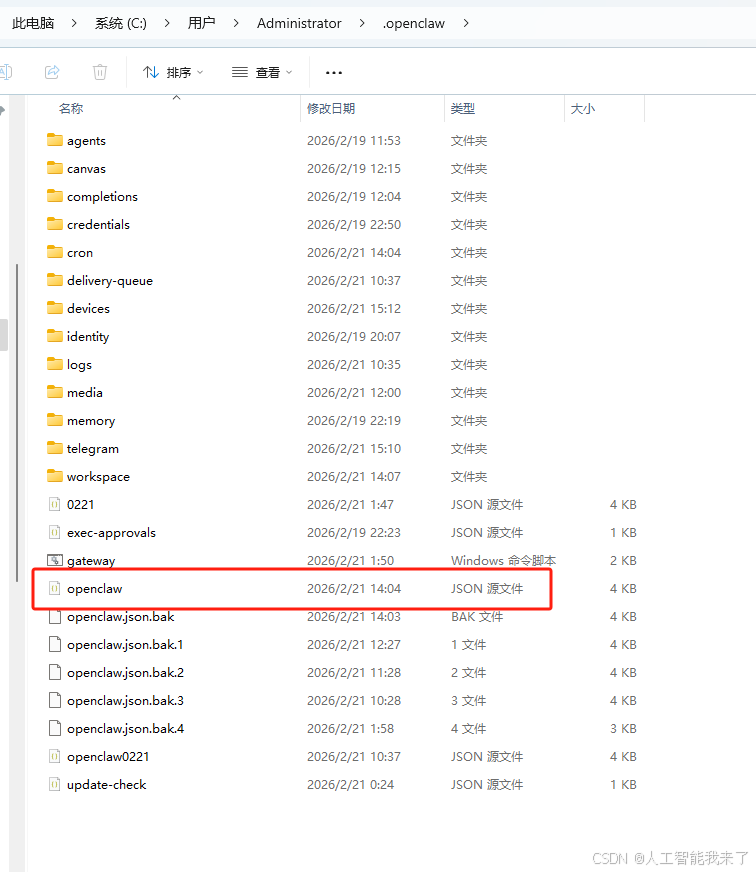
C:\Users\Administrator.openclaw的配置文件openclaw.json
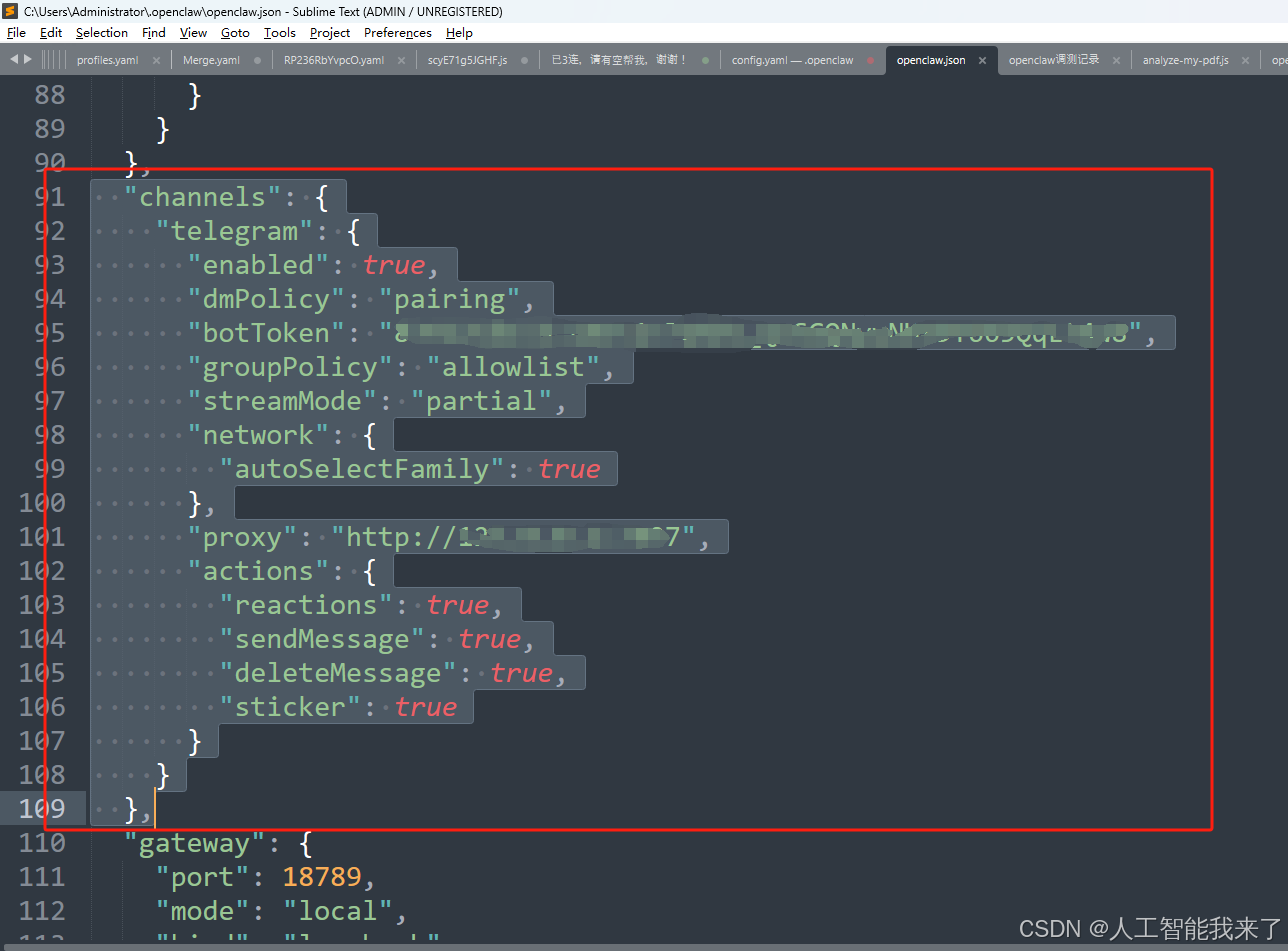
增加一段内容
bash
"channels": {
"telegram": {
"enabled": true,
"dmPolicy": "pairing",
"botToken": "你的telegram机器人的token",
"groupPolicy": "allowlist",
"streamMode": "partial",
"network": {
"autoSelectFamily": true
},
"proxy": "http://你的代理IP:你的代理端口",
"actions": {
"reactions": true,
"sendMessage": true,
"deleteMessage": true,
"sticker": true
}
}
},五、对接 Telegarm 电报机器人
打开你的 Telegram,搜索 @BotFather,发送 /newbot,来创建一个新的机器人,按提示设置:
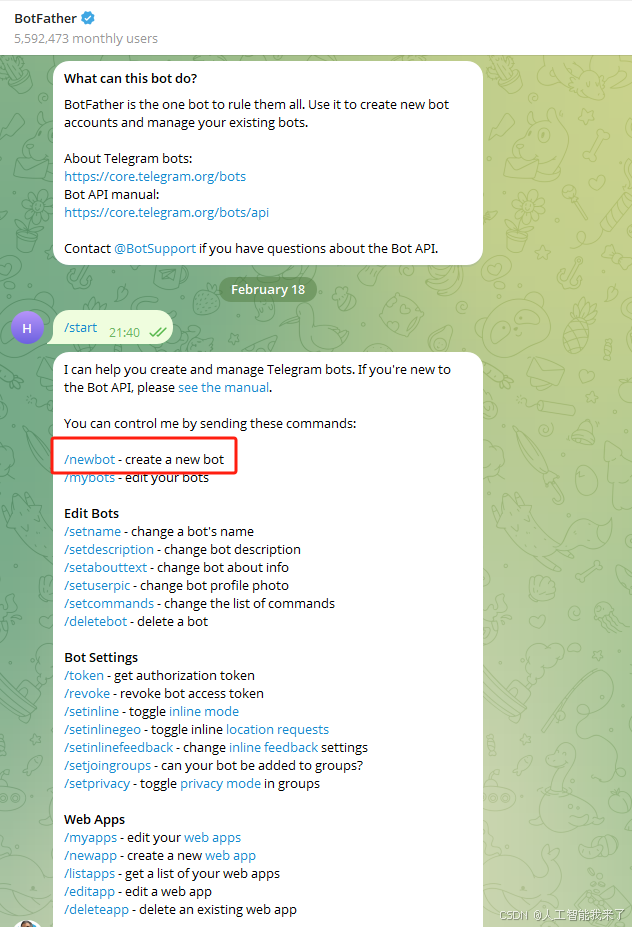
给 Bot 起个名字,比如我设置为 人工智能我来了
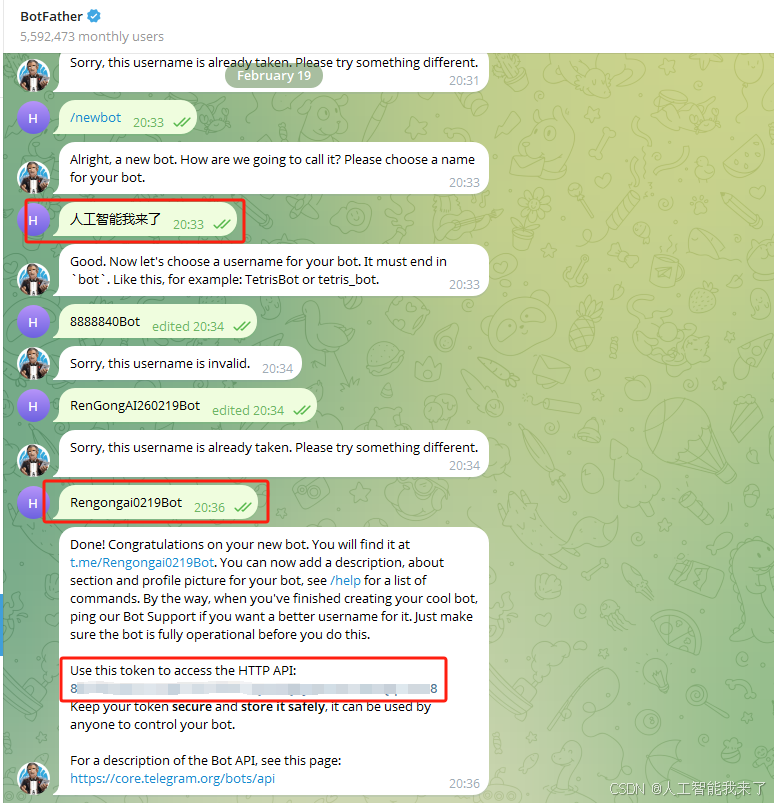
设置用户名(必须以 bot 结尾,比如Renggongai0219Bot )
最后会给你一串 Token:你的token
输入 token 进行对接,并进入到刚才创建的机器人里,第一次打开会显示还未正式对接,但是会在里面提供配对码,比如我的是 Pairing code: 你的token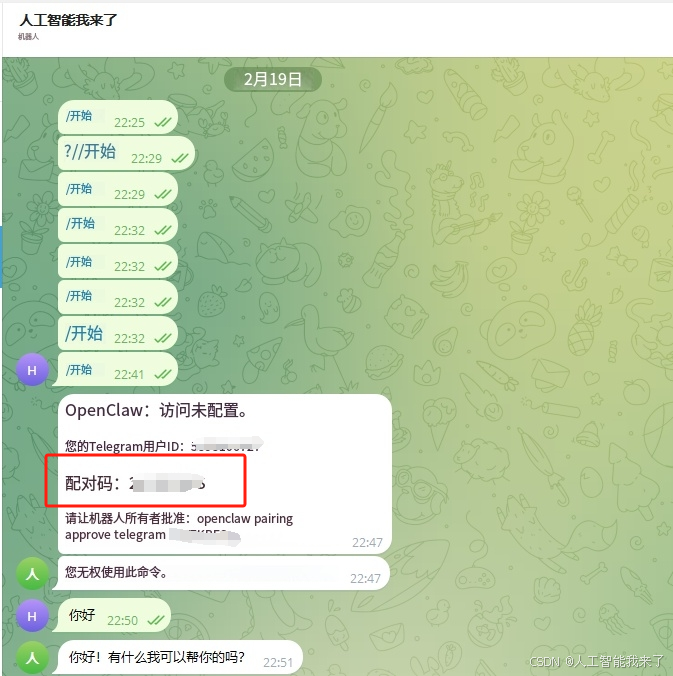
现在只需重新打开一个新的 Powershell 窗口,然后在里面输入配对命令即可
openclaw pairing approve telegram 这里填写你的配对码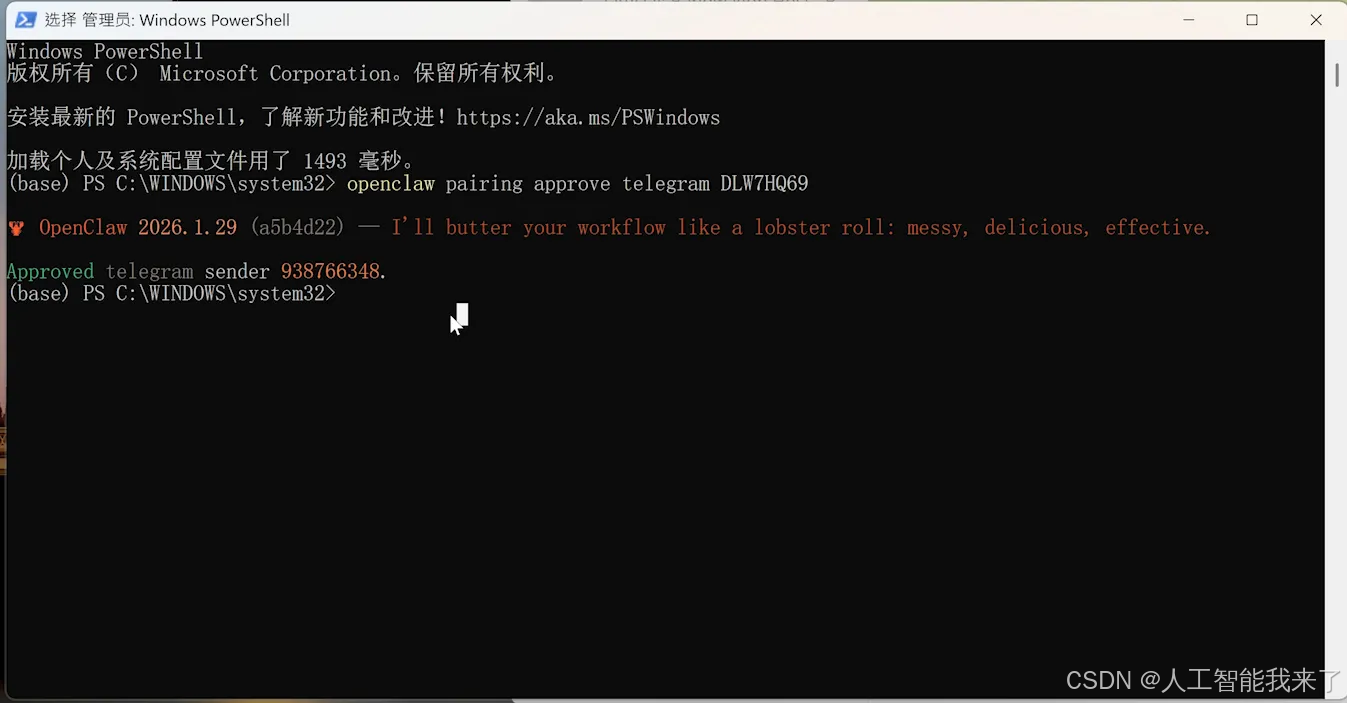 当你看到这个界面的话说明已经和Telegram配对成功了!
当你看到这个界面的话说明已经和Telegram配对成功了!
3 搜索网站能力部署
C:\Users\Administrator.openclaw的配置文件openclaw.json
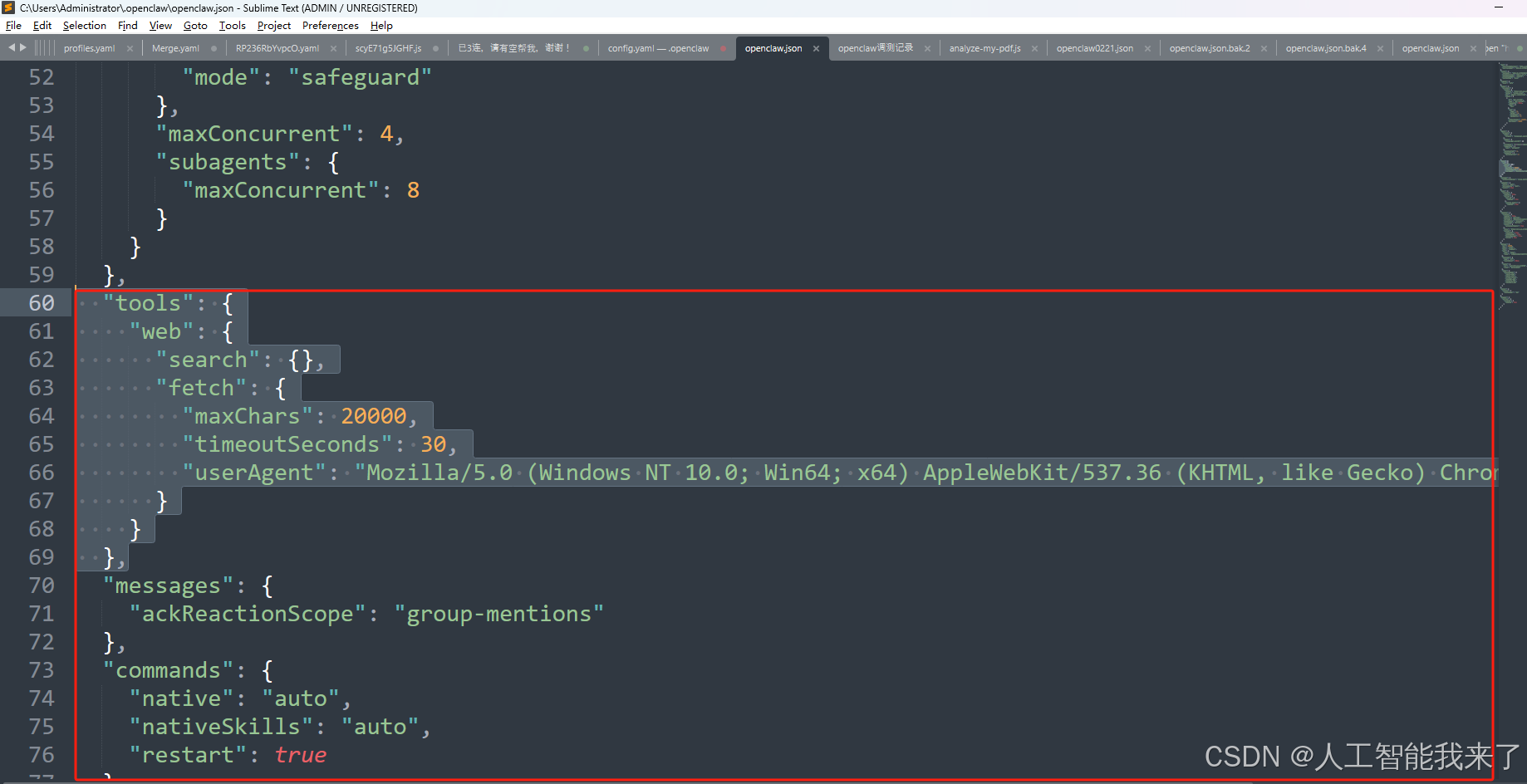
增加一段内容
bash
"tools": {
"web": {
"search": {},
"fetch": {
"maxChars": 20000,
"timeoutSeconds": 30,
"userAgent": "Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/120.0.0.0 Safari/537.36"
}
}
},4 openclaw.json配置文件全部内容
bash
{
"meta": {
"lastTouchedVersion": "2026.2.19-2",
"lastTouchedAt": "2026-02-21T06:04:19.113Z"
},
"wizard": {
"lastRunAt": "2026-02-21T06:04:19.057Z",
"lastRunVersion": "2026.2.19-2",
"lastRunCommand": "onboard",
"lastRunMode": "local"
},
"logging": {
"level": "info"
},
"models": {
"providers": {
"ollama": {
"baseUrl": "http://127.0.0.1:11434/v1",
"apiKey": "ollama-local",
"api": "openai-completions",
"models": [
{
"id": "gpt-oss:20b",
"name": "gpt-oss:20b",
"reasoning": false,
"input": [
"text"
],
"cost": {
"input": 0,
"output": 0,
"cacheRead": 0,
"cacheWrite": 0
},
"contextWindow": 131072,
"maxTokens": 16384
}
]
}
}
},
"agents": {
"defaults": {
"model": {
"primary": "ollama/gpt-oss:20b"
},
"models": {
"ollama/gpt-oss:20b": {}
},
"workspace": "C:\\Users\\Administrator\\.openclaw\\workspace",
"compaction": {
"mode": "safeguard"
},
"maxConcurrent": 4,
"subagents": {
"maxConcurrent": 8
}
}
},
"tools": {
"web": {
"search": {},
"fetch": {
"maxChars": 20000,
"timeoutSeconds": 30,
"userAgent": "Mozilla/5.0 (Windows NT 10.0; Win64; x64) AppleWebKit/537.36 (KHTML, like Gecko) Chrome/120.0.0.0 Safari/537.36"
}
}
},
"messages": {
"ackReactionScope": "group-mentions"
},
"commands": {
"native": "auto",
"nativeSkills": "auto",
"restart": true
},
"hooks": {
"internal": {
"enabled": true,
"entries": {
"boot-md": {
"enabled": true
},
"session-memory": {
"enabled": true
}
}
}
},
"channels": {
"telegram": {
"enabled": true,
"dmPolicy": "pairing",
"botToken": "用你自己的代替",
"groupPolicy": "allowlist",
"streamMode": "partial",
"network": {
"autoSelectFamily": true
},
"proxy": "http://127.0.0.1:7897",
"actions": {
"reactions": true,
"sendMessage": true,
"deleteMessage": true,
"sticker": true
}
}
},
"gateway": {
"port": 18789,
"mode": "local",
"bind": "loopback",
"auth": {
"mode": "token",
"token": "用你自己的代替"
},
"tailscale": {
"mode": "off",
"resetOnExit": false
},
"remote": {
"url": "ws://127.0.0.1:18789",
"token": "你设置的密码代替"
},
"nodes": {
"denyCommands": [
"camera.snap",
"camera.clip",
"screen.record",
"calendar.add",
"contacts.add",
"reminders.add"
]
}
},
"skills": {
"install": {
"nodeManager": "npm"
}
},
"plugins": {
"entries": {
"telegram": {
"enabled": true
}
}
}
}