一、引言
在油气输送、市政给排水、化工流体输送等工业场景中,管道内壁因腐蚀、结垢、焊缝凸起及施工残留等问题,会严重影响介质输送效率与系统安全。传统人工打磨或简易机械处理方式存在作业空间受限、效率低下、质量不均等痛点。本文介绍一款适配内径 300--700mm管道的打磨机器人,其凭借模块化行走机构与精准打磨执行系统,为管道内壁修复提供高效、安全、自动化的解决方案。
二、核心结构与技术优势
1. 自适应行走机构
该机器人采用多组弹性轮组 + 可伸缩支臂的复合行走结构,支臂内置弹簧阻尼与丝杠调节机构,可根据管道内径实时调整轮组支撑姿态,实现对 300--700mm 内径管道的全覆盖适配:
1.1.变径自适应:通过丝杠驱动支臂伸缩,可在短时间内完成不同内径管道的作业切换,无需更换硬件模块。
1.2.越障与贴合能力:弹性轮组配合阻尼弹簧,可有效跨越管道焊缝、局部凸起等障碍,同时保证行走轮与管壁的稳定贴合,避免打滑与姿态偏移。
1.3.多向行走能力 :支持前进、后退、原地转向,可在弯曲管道(≤45° 弯管)内灵活调整作业位置。

2. 精准打磨执行系统
机器人前端搭载模块化打磨头,可根据工况配置砂纸轮、钢丝轮或铣削刀盘,核心技术特点包括:
2.1.恒力打磨控制:通过力传感器与伺服驱动闭环控制,保证打磨头与管壁之间的恒定接触力,避免过度打磨或打磨不足,确保内壁粗糙度均匀。
2.2.高精度定位:结合视觉 / 激光测距传感器,可精准定位缺陷区域(如焊缝、腐蚀点),实现靶向打磨,减少无效作业。
2.3.快速换刀设计:打磨头采用快拆接口,可在 5 分钟内完成不同打磨介质的更换,适配除锈、去毛刺、抛光等多场景需求。
3. 智能控制与监测系统
3.1.远程操控:支持有线 / 无线通信,操作人员可在安全区域外实时监控机器人姿态、打磨压力与管道内壁状态,避免受限空间作业风险。
3.2.数据采集与分析:内置传感器可记录行走轨迹、打磨参数、缺陷位置等数据,生成管道内壁检测与修复报告,为后续维护提供数据支撑。
3.3.安全保护机制 :具备过载保护、防卡死报警、低电量提醒等功能,可在异常工况下自动停机并回退,保障设备与管道安全。

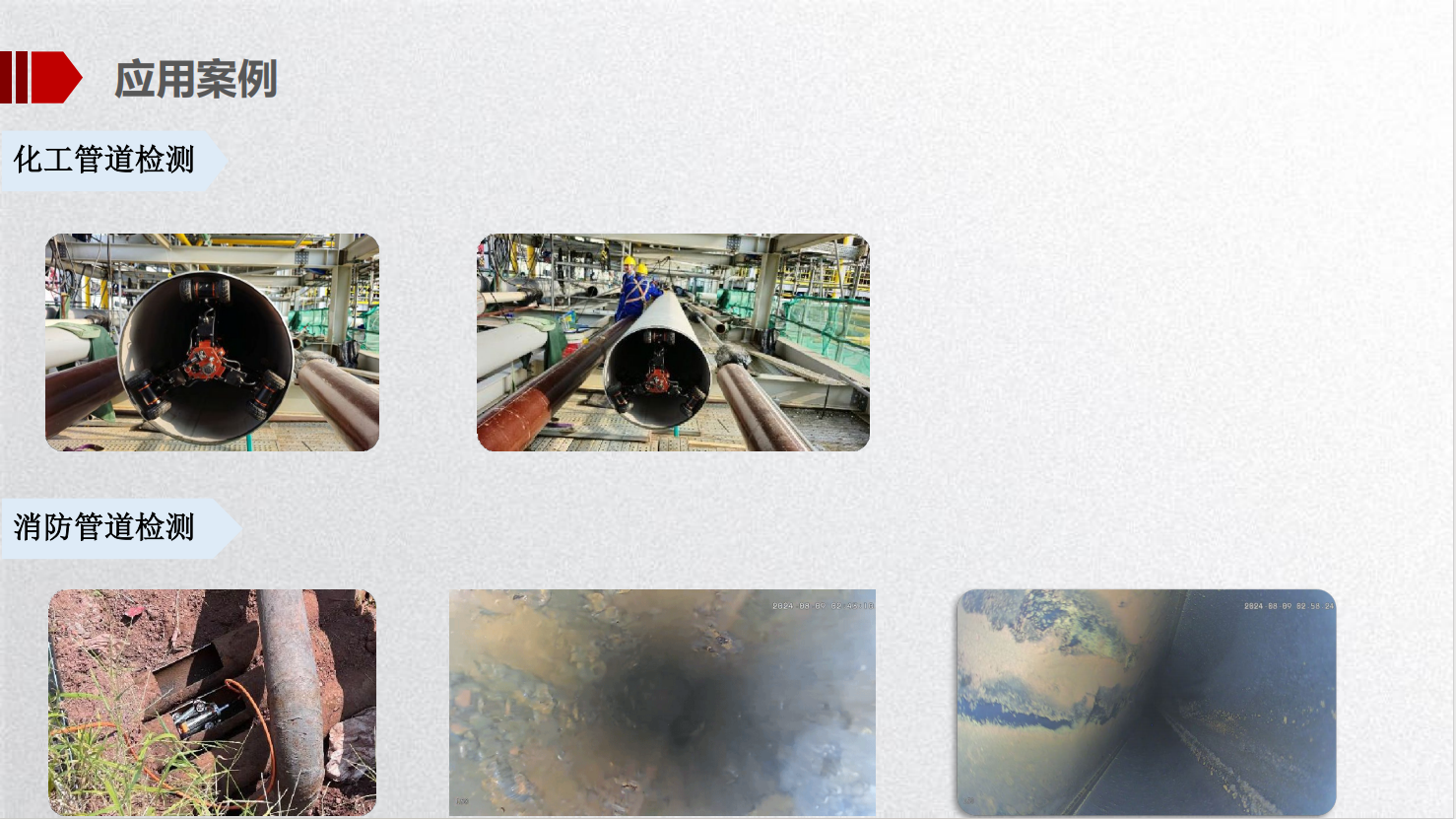
三、应用场景与性能表现
1. 典型应用场景
1.1.油气管道内壁除锈与焊缝打磨:去除管道内壁锈蚀层与焊接残留,提升介质流动性与防腐蚀能力。
1.2.市政给排水管道结垢清理 :高效清除管壁水垢、泥沙沉积,恢复管道通流面积。
1.3.化工管道内壁修复 :针对腐蚀坑点进行精准打磨,为后续内衬修复提供平整基面。

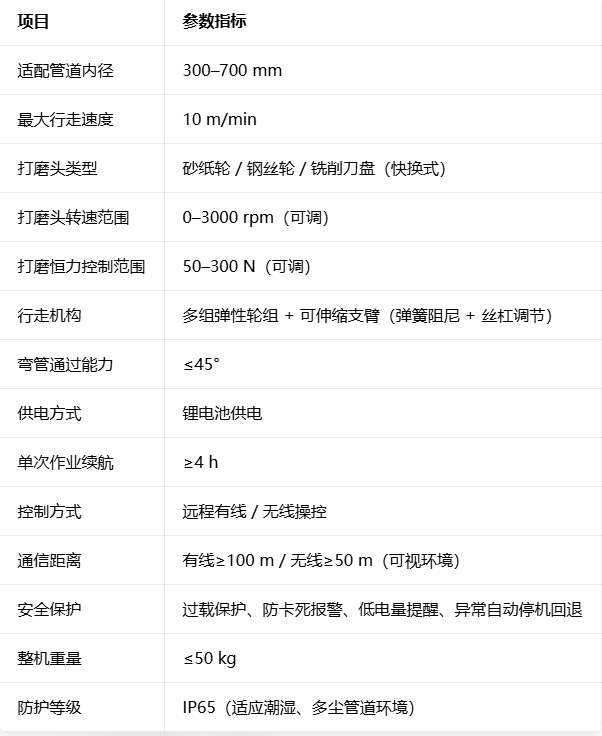
2. 关键性能指标
四、技术创新与价值
- 变径适配的通用性:突破传统管道机器人单内径适配的局限,一套设备可覆盖 300--700mm 全范围内径,大幅降低企业设备采购与维护成本。
- 自动化作业效率:相比人工打磨,作业效率提升 5--8 倍,且避免了人员进入受限空间的安全风险。
- 质量可控性 :恒力打磨与精准定位技术,保证管道内壁修复质量的一致性与稳定性,延长管道使用寿命。
五、结论与展望
这款适配 300--700mm 内径的管道打磨机器人,通过自适应行走机构、精准打磨执行系统与智能控制技术,为工业管道内壁修复提供了高效、安全、可靠的自动化解决方案。未来,可进一步集成 AI 缺陷识别与自主导航算法,实现无人化作业,拓展至更长距离、更复杂工况的管道修复场景,为工业管网运维智能化升级提供核心支撑。