
在轨物科技的光伏清洁机器人智能控制与运维解决方案中,智能硬件是实现"无人值守"自主运维的核心底座。根据电站不同的电机需求,该方案提供了无刷电机版本和有刷电机版本两种硬件组合,以适配多样化的机器人设计。
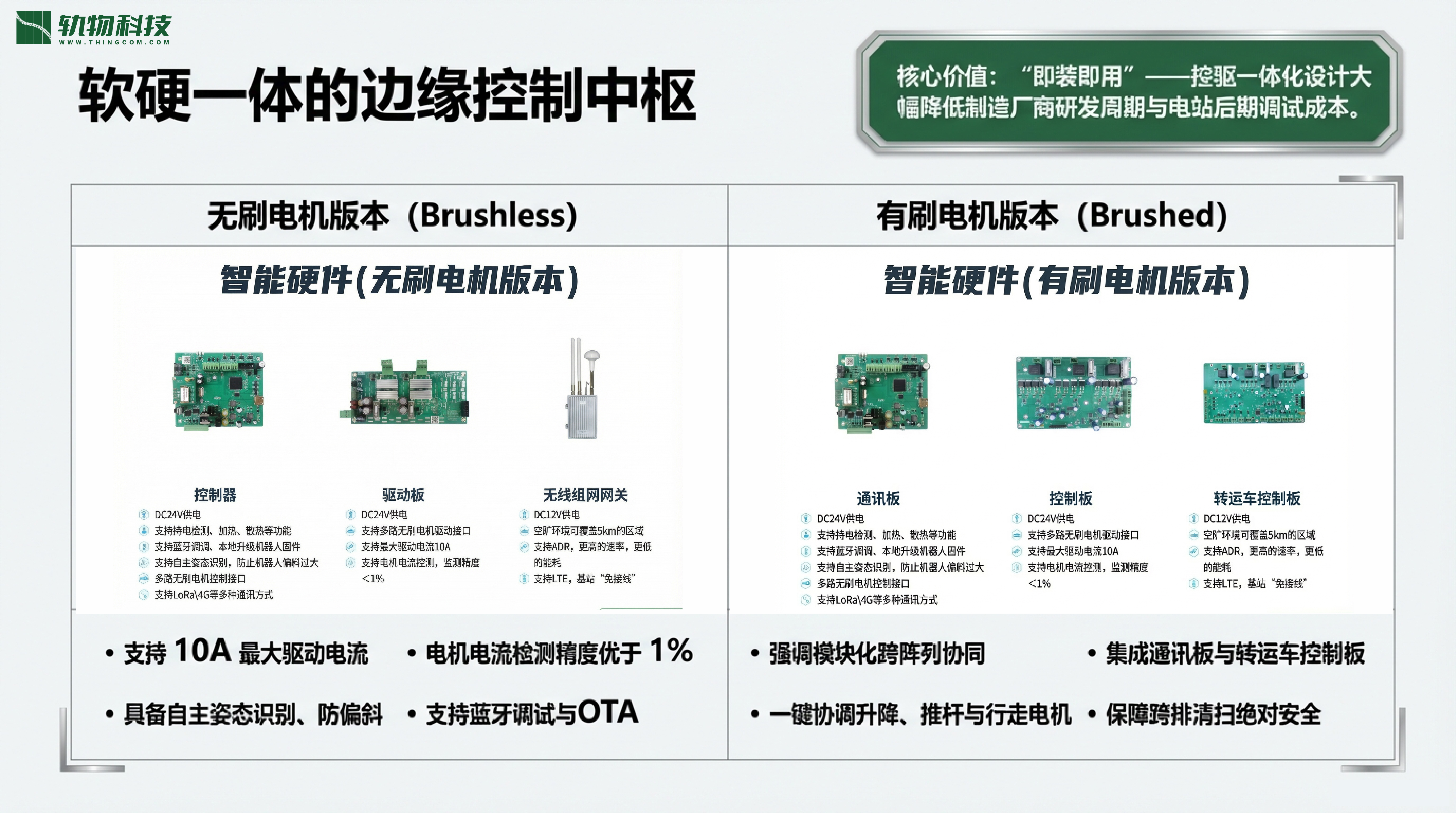
以下是这两个版本的详细技术规格与作用:

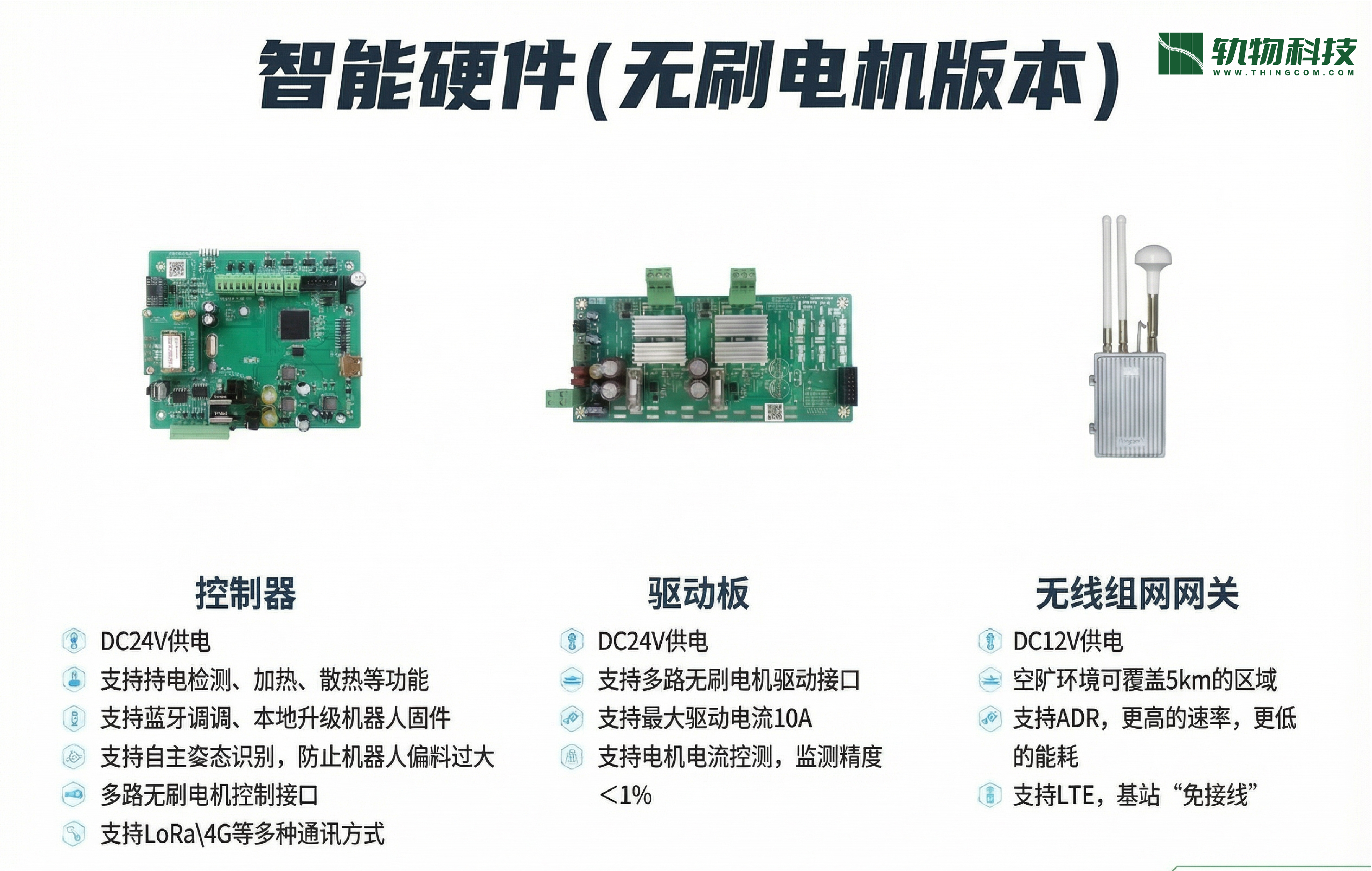
该版本集成了高性能的控制与驱动能力,特别强调对无刷电机的精确掌控和超远距离的通信覆盖。
- 控制器 (Controller):
-
- 供电与环境适应: 采用DC24V供电,支持掉电检测,并配备加热和散热功能,确保机器人在极寒或高温等极端户外工况下稳定运行。
- 智能算法: 具备自主姿态识别能力,能有效防止机器人在清扫过程中发生偏斜过大而卡滞。
- 运维便捷: 支持蓝牙远程调试及本地固件升级(OTA),并预留多路无刷电机控制接口,支持LoRa及4G/5G多种通讯。
- 驱动板 (Driver Board):
-
- 强力驱动: 支持多路无刷电机驱动接口,最大驱动电流可达10A。
- 精密监测: 支持电机电流实时检测,监测精度优于1%,为机器人的精准姿态闭环控制提供数据支撑。
- 无线组网网关 (Gateway):
-
- 广域覆盖: 在空旷环境下,通讯距离可覆盖达5km。
- 高效部署: 支持ADR技术(速率更高、能耗更低)及LTE通讯,可实现基站的"免接线"快速部署。

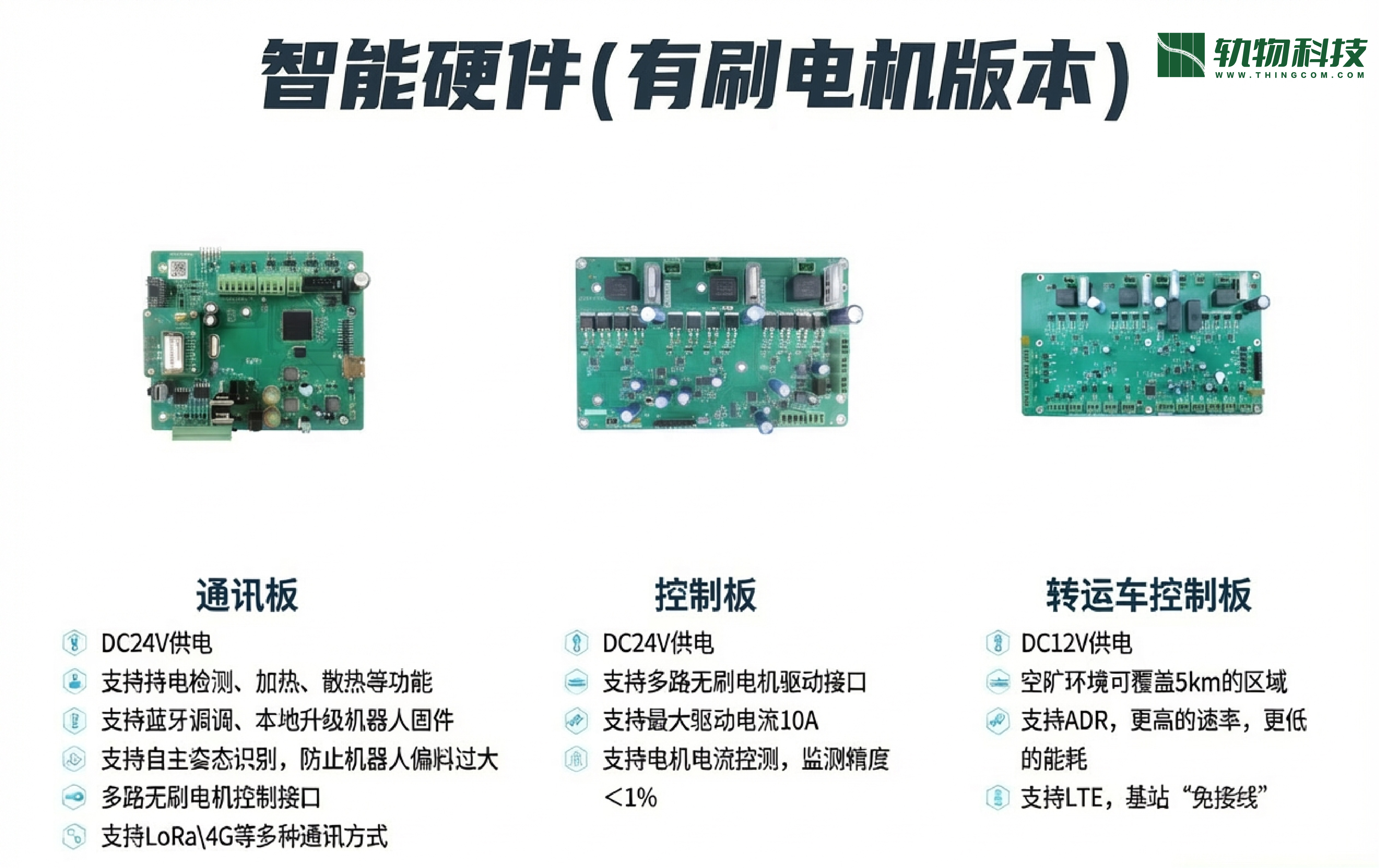
该版本方案更注重模块化协同,由通讯板、控制板和专用的转运车控制板共同构成,特别适合需要频繁跨阵列作业的场景。
- 通讯板 (Communication Board):
-
- 提供DC24V供电,配备1路隔离的485通讯接口和1路继电器输出控制,支持LoRa/4G等通讯。
- 控制板 (Control Board):
-
- 控驱一体化: 能同时控制2路驱动轮电机和1路毛刷电机,最大驱动电流同样支持10A。
- 多样化控制: 同样具备自主姿态识别和高精度电流检测功能,且额外支持遥控器直接控制。
- 转运车控制板 (Transfer Car Control Board):
-
- 多维动力协调: 专门用于机器人在阵列间的流转摆渡,集成了多路电机驱动口,可同步协调控制升降电机、推杆电机和行走电机。
- 安全防护: 配备多路限位检测接口,并利用自主姿态识别算法防止转运车在移动中偏斜,确保跨排作业的安全。

无论是无刷还是有刷版本,轨物科技的方案均具备以下核心价值:
- 软硬一体,即装即用: 硬件与运维管理平台深度融合,助力厂商显著缩短50%以上的研发周期。
- 算法赋能硬件: 通过基于电机电流反馈的姿态闭环算法实现厘米级导航纠偏,在降低硬件物料成本的同时保证了高精度运行。
- 全周期监测: 配合SCADA和云平台,可实现故障诊断、报表自动导出及全量数据上报。



