ESP32 使用ESP-IDF驱动DS1302时钟芯片源码分享
- 一、源码分享
- 二、DS1302时钟芯片介绍
- 三、ESP-IDF详解
-
- [1、ESP32 概述](#1、ESP32 概述)
- [2、 ESP-IDF 详解](#2、 ESP-IDF 详解)
-
- [2.1 、ESP-IDF 的核心组件与架构](#2.1 、ESP-IDF 的核心组件与架构)
- [2.2 、ESP-IDF 开发环境与工具链](#2.2 、ESP-IDF 开发环境与工具链)
- [2.3 、ESP-IDF 开发流程简述](#2.3 、ESP-IDF 开发流程简述)
- [2.4、 示例代码结构 (最简单的 Hello World)](#2.4、 示例代码结构 (最简单的 Hello World))
- [2.5、 优势与特点](#2.5、 优势与特点)
- [2.6 、适用场景](#2.6 、适用场景)
- 3、总结
一、源码分享
1、效果展示
2、开发环境搭建
参考我这篇博文:VS Code 在线安装ESP-IDF,ESP32开发环境搭建详细教程
3、源码分享
3.1、ds1302.h
c
#ifndef _OLED12864_H_
#define _OLED12864_H_
#include <stdint.h>
#include <string.h>
#include <math.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_log.h"
#include "driver/gpio.h"
#define DS1302_DATA GPIO_NUM_22
#define DS1302_CLK GPIO_NUM_23
#define DS1302_RST GPIO_NUM_21
#define DS1302_DATA_IN { }
#define DS1302_DATA_OUT { }
#define DS1302_DATA_LOW gpio_set_level(DS1302_DATA,0)
#define DS1302_DATA_HIGH gpio_set_level(DS1302_DATA,1)
#define DS1302_CLK_LOW gpio_set_level(DS1302_CLK,0)
#define DS1302_CLK_HIGH gpio_set_level(DS1302_CLK,1)
#define DS1302_RST_LOW gpio_set_level(DS1302_RST,0)
#define DS1302_RST_HIGH gpio_set_level(DS1302_RST,1)
#define DS1302_DATA_READ() gpio_get_level(DS1302_DATA)
typedef struct _time{
uint16_t year;
uint8_t month;
uint8_t day;
uint8_t week;
uint8_t hours;
uint8_t minute;
uint8_t second;
}Time;
//register addr
//写保护寄存器
#define WRITE_PROTECT 0x8e
#define WRITE_PROTECT_CLOSE 0x00
#define WRITE_PROTECT_OPEN 0x80
#define SECONDE_ADDR 0x80
#define MINUTE_ADDR 0x82
#define HOURS_ADDR 0x84
#define DAY_ADDR 0x86
#define MONTH_ADDR 0x88
#define WEEK_ADDR 0x8a
#define YEAR_ADDR 0x8c
#define CONTROL_ADDR 0x8e //写保护, value: 0x00: 关闭写保护,0x80:打开写保护
#define CHARGE_ADDR 0x90 //充电寄存器
#define CLOCK_MUTI_WAY_ADDR 0xbe //时钟多字节方式
#define PAUSE_CLOCK 0x80 //时钟暂停
#define RUNNING_CLOCK 0x00 //时钟运行
#define NO_CHARGE 0x00 //禁止充电
//RAM addr
#define RAM0_ADDR 0xc0
void ds1302_init(void);
uint8_t read_byte(uint8_t addr);
void get_time(Time *dstime);
void set_time(Time dstime);
void write_byte(uint8_t addr,uint8_t data);
#endif /* _HDW_WS2812_H_ */3.2、ds1302.c
c
#include "ds1302.h"
const char *TAG = "ds1302";
//初略延时
static void delay(uint32_t time)
{
esp_rom_delay_us(time*500);
}
/**
* @brief: ds1302 init
* @param: none
* @return: none
*/
void ds1302_init(void)
{
uint8_t write_protect_bit = 0;
uint8_t ram0 = 0;
//GPIO 初始化
gpio_config_t io_conf = {
.pin_bit_mask = (1ULL << DS1302_CLK) | (1ULL << DS1302_RST),
.mode = GPIO_MODE_OUTPUT,
.pull_up_en = GPIO_PULLUP_DISABLE,
.pull_down_en = GPIO_PULLDOWN_DISABLE,
.intr_type = GPIO_INTR_DISABLE,
};
gpio_config(&io_conf);
io_conf.pin_bit_mask = 1ULL << DS1302_DATA,
io_conf.mode = GPIO_MODE_INPUT_OUTPUT_OD,
io_conf.pull_up_en = GPIO_PULLUP_ENABLE,
io_conf.pull_down_en = GPIO_PULLDOWN_DISABLE,
io_conf.intr_type = GPIO_INTR_DISABLE,
gpio_config(&io_conf);
//复位
DS1302_DATA_LOW;
DS1302_RST_LOW;
DS1302_CLK_LOW;
delay(200);
//关闭芯片写保护位
write_byte(CONTROL_ADDR,WRITE_PROTECT_CLOSE);
//判断写保护位是否为关闭状态
write_protect_bit = read_byte(CONTROL_ADDR);
if(write_protect_bit == 0x00)
{
printf("ds1302 is ok!\r\n");
}
else
{
printf("ds1302 is error!\r\n");
}
printf("rece write protect value = %02x.\r\n",write_protect_bit);
//检测RAM0是否可以使用
write_byte(RAM0_ADDR,0xfa);
ram0 = read_byte(RAM0_ADDR);
if(ram0 == 0xfa)
{
printf("ds1302 ram is ok!.\r\n");
}
printf("ram0 = %02x.\r\n",ram0);
//判断DS1302是否正在运行
if(read_byte(SECONDE_ADDR) & 0x80)
{
//设置时间
// set_time_params(2024,5,31,3,23,59,55);
// set_time_params(2024,4,17,3,11,59,55);
printf("ds1302 is running!\r\n");
}
}
/**
* @brief: 向指定地址写入一个字节的数据
* @param addr
* @param data
*/
void write_byte(uint8_t addr,uint8_t data)
{
uint8_t i = 0;
//时序开始
DS1302_RST_LOW;
DS1302_CLK_LOW;
delay(1);
DS1302_RST_HIGH;
//设置DATA pin为输出
DS1302_DATA_OUT;
addr = addr & 0xfe; //写方式,最后一位为0
//发送命令及其地址字节
for (i = 0; i < 8; i++)
{
//准备好数据,先发送低位数据
if(addr & 0x01)
{
DS1302_DATA_HIGH;
}
else
{
DS1302_DATA_LOW;
}
//时序,从机上升沿接收到数据
delay(1);
DS1302_CLK_LOW;
delay(1);
DS1302_CLK_HIGH;
//右移一位
addr = addr >> 1;
}
//发送数据字节
for (i = 0;i < 8;i++)
{
if(data & 0x01)
DS1302_DATA_HIGH;
else
DS1302_DATA_LOW;
delay(1);
DS1302_CLK_LOW;
delay(1);
DS1302_CLK_HIGH;
data = data >> 1;
}
//时序结束操作
delay(1);
DS1302_CLK_LOW;
delay(1);
DS1302_RST_LOW;
}
/**
* @brief: 从指定地址读取一个字节的数据
* @param addr
* @return
*/
uint8_t read_byte(uint8_t addr)
{
uint8_t rec_data = 0x00;
uint8_t i = 0;
//时序开始操作
DS1302_RST_LOW;
DS1302_CLK_LOW;
delay(1);
DS1302_RST_HIGH;
//设置DATA pin为输出模式
DS1302_DATA_OUT;
//读方式,寄存器最后一位为1
addr = addr | 0x01;
//读时序,先发送要读的地址
for (i = 0; i < 8; i++)
{
DS1302_CLK_LOW;
if(addr & 0x01)
DS1302_DATA_HIGH;
else
DS1302_DATA_LOW;
delay(1);
DS1302_CLK_HIGH;
delay(1);
addr = addr >> 1;
}
//设置DATA pin为输入模式
DS1302_DATA_IN;
for (i = 0; i < 8; i++)
{
DS1302_CLK_LOW;
//rec_data = rec_data >> 1;
if(DS1302_DATA_READ())
{
//rec_data = rec_data | 0x80;
rec_data = rec_data | (1 << i);
}
else
{
rec_data = rec_data & (~(1 << i));
}
DS1302_CLK_HIGH;
delay(1);
}
//结束时序
DS1302_CLK_LOW;
DS1302_RST_LOW;
return rec_data;
}
/**
* @brief: 设置时间
* @param: none
* @return: none
*/
void set_time(Time dstime)
{
Time setTime;
dstime.year -= 2000;
setTime.year = dstime.year/10*16+dstime.year%10;
setTime.month = dstime.month/10*16+dstime.month%10;
setTime.day = dstime.day/10*16+dstime.day%10;
setTime.week = dstime.week/10*16+dstime.week%10;
setTime.hours = dstime.hours/10*16+dstime.hours%10;
// dstime.set_time.hours = 0x33;
setTime.minute = dstime.minute/10*16+dstime.minute%10;
setTime.second = dstime.second/10*16+dstime.second%10;
//关闭时钟
write_byte(SECONDE_ADDR,PAUSE_CLOCK);
//设置年,月,日,小时,分钟,秒
write_byte(YEAR_ADDR,setTime.year);
write_byte(MONTH_ADDR,setTime.month);
write_byte(DAY_ADDR,setTime.day);
write_byte(WEEK_ADDR,setTime.week);
write_byte(HOURS_ADDR,setTime.hours); //24h方式
write_byte(MINUTE_ADDR,setTime.minute);
write_byte(SECONDE_ADDR,setTime.second);
//设置禁止充电,因为我使用的是纽扣电池
write_byte(CHARGE_ADDR,NO_CHARGE);
}
/**
* @brief: 获取时间,存储在结构体中
* @param: void
* @return: none
*/
void get_time(Time *dstime)
{
uint16_t year = 0;
uint8_t month = 0,day = 0,week = 0,hours = 0,minute = 0,second = 0;
//获取年,月,日,时,分,秒
year = read_byte(YEAR_ADDR);
month = read_byte(MONTH_ADDR);
day = read_byte(DAY_ADDR);
week = read_byte(WEEK_ADDR);
hours = read_byte(HOURS_ADDR);
minute = read_byte(MINUTE_ADDR);
second = read_byte(SECONDE_ADDR);
//转换为十进制数值
// dstime.get_time.year = 2000 + (year >> 4)*10 + (year & 0x0F);
// dstime.get_time.month = ((month & 0x10)>>4)*10 + (month & 0x0F);
// dstime.get_time.day = ((day & 0x30)>>4)*10 + (day & 0x0F);
// dstime.get_time.week = week & 0x0F;
// dstime.get_time.hours = ((hours & 0x20)>>5)*10 + ((hours & 0x10)>>4)*10 + (hours & 0x0F);
// dstime.get_time.minute = ((minute & 0x70)>>4)*10 + (minute & 0x0F);
// dstime.get_time.second = ((second & 0x70)>>4)*10 + (second & 0x0F);
//另一种计算方法
dstime->year = 2000 + year/16*10+year%16;
dstime->month = month/16*10+month%16;
dstime->day = day/16*10+day%16;
dstime->week = week/16*10+week%16;
dstime->hours = (hours/16*10)+hours%16;
dstime->minute = minute/16*10+minute%16;
dstime->second = second/16*10+second%16;
}3.3、main.c
c
#include <stdio.h>
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "ds1302.h"
#include "led.h"
void app_main(void)
{
led_init();
ds1302_init();
Time dstime;
dstime.year = 2026;
dstime.month = 2;
dstime.day = 10;
dstime.hours = 10;
dstime.minute = 0;
dstime.second = 0;
set_time(dstime);
while(1)
{
LED0_TOGGLE();
get_time(&dstime);
printf("Time: %d-%d-%d %d:%d:%d\n", dstime.year, dstime.month, dstime.day, dstime.hours, dstime.minute, dstime.second);
vTaskDelay(pdTICKS_TO_MS(1000));
}
}二、DS1302时钟芯片介绍
DS1302 是一款由 Dallas Semiconductor(后被 Maxim Integrated 收购)设计的低功耗、带涓流充电功能的实时时钟(Real-Time Clock, RTC)芯片。它广泛应用于各种需要记录时间信息的电子设备中,如数字钟表、仪表、嵌入式系统等。
1、核心特性
-
实时时钟功能:
- 提供秒、分、时、日、月、星期、年的计时信息。
- 月份天数自动调整(包括闰年补偿),有效期至 2100 年。
- 支持 24 小时制或带 AM/PM 指示的 12 小时制。
-
串行接口:
- 采用简单的三线制(
CE、I/O、SCLK)串行接口进行通信。 - 与微控制器(如单片机)连接方便,占用 I/O 资源少。
- 采用简单的三线制(
-
低功耗:
- 工作电压范围宽:主电源
Vcc1为 2.0V 至 5.5V。 - 具有备用电源引脚
Vcc2。当主电源Vcc1掉电时,芯片自动切换到备用电源(通常为纽扣电池或超级电容)供电,维持时钟继续运行并保护 RAM 数据。 - 在
Vcc1低于Vcc2约 0.2V 时自动切换。 - 备用电源供电时功耗极低(典型值小于 1μA)。
- 工作电压范围宽:主电源
-
涓流充电功能:
- 内置涓流充电器,可为备用电池(如可充电镍镉电池)提供小电流充电。
- 充电电压和电流可通过寄存器配置。例如:
- 选择 1 个或 2 个二极管。
- 选择 2KΩ、4KΩ 或 8KΩ 的电阻。
- 公式:充电电流 I = ( V c c 1 − V d i o d e ) R I = \frac{(Vcc1 - V_{diode})}{R} I=R(Vcc1−Vdiode)
- 其中 V d i o d e V_{diode} Vdiode 是二极管压降(约 0.7V), R R R 是选择的电阻值。
-
内部 RAM:
- 包含 31 字节的静态 RAM (SRAM)。
- 在备用电源模式下,RAM 数据也能被保持。
- 可用于存储用户自定义的配置信息或临时数据。
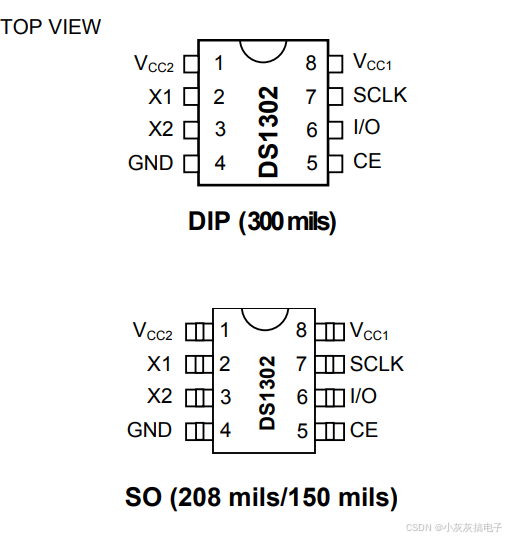
2、引脚功能
DS1302 通常有 8 个引脚(DIP 或 SOIC 封装):
- Vcc1: 主电源正极。通常接系统电源(如 3.3V 或 5V)。
- Vcc2: 备用电源正极。通常接纽扣电池(如 3V)或超级电容。
- GND: 接地。
- X1, X2: 连接 32.768kHz 晶振引脚。晶振精度直接影响时钟精度。
- CE (Chip Enable): 芯片使能引脚。高电平有效,启动数据传输过程。
- I/O (Data Input/Output): 双向数据线。用于向芯片发送命令/数据或从芯片读取数据。
- SCLK (Serial Clock): 串行时钟输入。由主控制器(MCU)提供,用于同步数据传输。
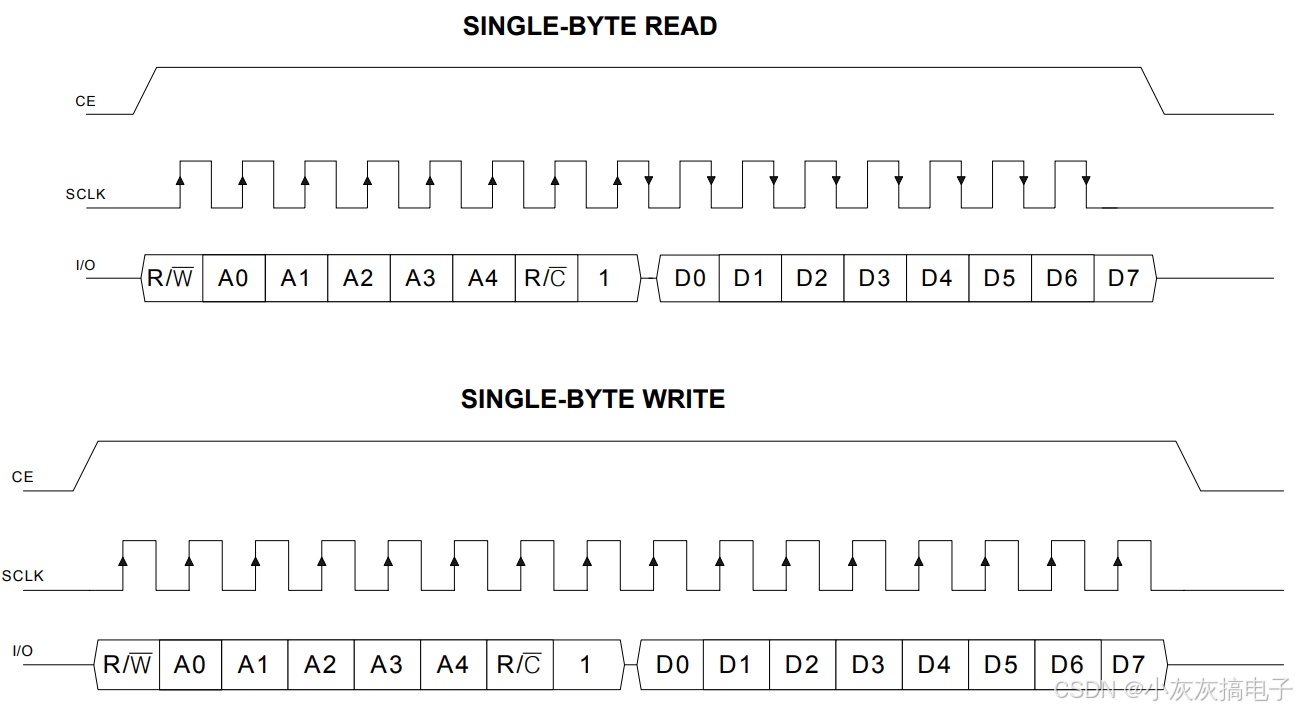
3、通信协议
DS1302 使用一种特殊的 3 线串行协议:
- 起始条件 :在
SCLK为低电平时,将CE拉高。 - 数据传输 :
- 数据传输发生在
SCLK的上升沿或下降沿(取决于具体时序)。 - 每个字节(8 位)由高位(MSB)向低位(LSB)依次传输。
- 一次数据传输过程由 1 个命令字节开始,后跟 1 个或多个数据字节。
- 数据传输发生在
- 命令字节 :
- 最高位(Bit 7)必须为
1。 - Bit 6:
0表示时钟/日历寄存器,1表示 RAM 寄存器。 - Bits 5-1:寄存器地址(
A4-A0)。 - 最低位(Bit 0):
0表示写操作,1表示读操作。
- 最高位(Bit 7)必须为
- 数据字节 :
- 对于写操作:在
SCLK的上升沿,主控将数据位放到I/O线上。 - 对于读操作:在
SCLK的下降沿,DS1302 将数据位放到I/O线上,主控在SCLK的上升沿读取。
- 对于写操作:在
- 结束条件 :传输完成后,将
CE拉低。
4、寄存器映射
DS1302 内部有多个寄存器用于控制和读取时间信息以及配置。以下是一些关键寄存器(地址均为十六进制):
| 地址 | 名称 | Bit 7 | Bit 6 | Bit 5 | Bit 4 | Bit 3 | Bit 2 | Bit 1 | Bit 0 | 范围/功能 |
|---|---|---|---|---|---|---|---|---|---|---|
| 0x80 | 秒寄存器 | CH | 10秒 | 秒 | 00-59 | |||||
| 0x82 | 分寄存器 | 10分 | 分 | 00-59 | ||||||
| 0x84 | 小时寄存器 | 12/24 | AM/PM | 10时 | 时 | 00-23/01-12 | ||||
| 0x86 | 日寄存器 | 10日 | 日 | 01-31 | ||||||
| 0x88 | 月寄存器 | 10月 | 月 | 01-12 | ||||||
| 0x8A | 星期寄存器 | 星期 | 01-07 | |||||||
| 0x8C | 年寄存器 | 10年 | 年 | 00-99 | ||||||
| 0x8E | 控制寄存器 | WP | 写保护 | |||||||
| 0x90 | 涓流充电 | TCS | DS | RS | 充电配置 | |||||
| 0xC0 | RAM 起始 | 31字节 RAM |
说明:
- CH (Bit 7 of Seconds):时钟停止位。
1= 时钟停止(晶振停振),0= 时钟运行。 - 12/24 (Bit 7 of Hours):小时模式。
1= 12 小时制,0= 24 小时制。 - AM/PM (Bit 5 of Hours in 12h mode):
1= PM,0= AM。 - WP (Write Protect, Bit 0 of Control):写保护位。
1= 禁止写入时钟/日历寄存器(除 CH 位),0= 允许写入。 - TCS, DS, RS:涓流充电控制位。用于选择是否开启充电以及设置二极管和电阻。
- 时间、日期、星期寄存器中的数据均以 BCD 码(Binary-Coded Decimal)格式存储。例如,十位数字存储在 Bit 6-4(或相应高位),个位数字存储在 Bit 3-0(或相应低位)。
- RAM 寄存器地址从
0xC0到0xFC。
5、应用提示
- 晶振选择 :使用标称频率为 32.768kHz 的石英晶体。并联匹配电容通常为 6pF 或 12.5pF,具体值参考晶振规格书。计算公式近似为 C l o a d ≈ C 1 × C 2 C 1 + C 2 + C s t r a y C_{load} \approx \frac{C1 \times C2}{C1 + C2} + C_{stray} Cload≈C1+C2C1×C2+Cstray,通常 C 1 = C 2 C1 = C2 C1=C2。DS1302 内部已有负载电容。
- 备用电源 :典型使用 3V 锂锰纽扣电池(如 CR2032)或 超级电容(如 0.1F-1F)。使用超级电容时,需注意其充电时间和电压范围。
- 上电初始化 :首次使用或更换电池后,需通过 MCU 向 DS1302 写入正确的时间和日期,并清除
CH位启动时钟。 - 数据读取:读取时间时,建议一次性读取多个连续寄存器(如秒到年),以减少时间在读取过程中发生改变的风险。
- I/O 线 :
I/O引脚通常需要连接一个上拉电阻(如 4.7KΩ 或 10KΩ)到Vcc1,以确保信号稳定性。
三、ESP-IDF详解
1、ESP32 概述
ESP32 是由乐鑫科技(Espressif Systems)推出的一款高性能、低功耗、高集成度的 Wi-Fi & 蓝牙双模系统级芯片(SoC)。它广泛应用于物联网(IoT)、智能家居、工业控制等领域。其关键特性包括:
- 双核处理器(通常为 Xtensa LX6,某些型号为 RISC-V)
- 集成 Wi-Fi (802.11 b/g/n) 和蓝牙 (包括经典蓝牙和低功耗蓝牙 BLE)
- 丰富的外设接口: S P I SPI SPI, I 2 C I2C I2C, I 2 S I2S I2S, U A R T UART UART, A D C ADC ADC, D A C DAC DAC, P W M PWM PWM, 触摸传感器等
- 充足的内存(RAM 和 Flash 选项多样)
- 强大的安全特性(如加密加速器)
- 超低功耗设计,支持多种休眠模式
2、 ESP-IDF 详解
ESP-IDF (Espressif IoT Development Framework) 是乐鑫官方为 ESP32、ESP32-S 系列、ESP32-C 系列等芯片提供的开发框架和 SDK(软件开发工具包)。它是开发基于 ESP32 芯片应用程序的首选和官方推荐工具。
2.1 、ESP-IDF 的核心组件与架构
ESP-IDF 是一个分层、模块化的框架:
- 硬件抽象层 (HAL): 提供对芯片硬件资源(如 GPIO、UART、SPI、I2C、定时器、ADC、DAC、RTC、Wi-Fi、蓝牙等)进行操作的统一接口,屏蔽底层硬件细节。
- 驱动 (Drivers): 在 HAL 之上,提供更易用、功能更丰富的设备驱动(如 SPI Flash 驱动、SD 卡驱动、以太网驱动等)。
- FreeRTOS: ESP-IDF 深度集成了开源的 FreeRTOS 实时操作系统内核。它提供了任务管理、队列、信号量、软件定时器、中断管理等机制,充分利用 ESP32 的多核特性(任务可以在不同核心上运行)。
- 中间件:
- Wi-Fi 协议栈: 实现 Wi-Fi 的 Station(客户端)、SoftAP(接入点)、Promiscuous(监听)模式。
- 蓝牙协议栈: 实现经典蓝牙和低功耗蓝牙 (BLE) 的各种角色(如 GATT Client/Server, GAP Central/Peripheral)。
- TCP/IP 协议栈 (lwIP): 轻量级的 TCP/IP 协议栈,支持 IPv4/IPv6 (部分型号)、DHCP、DNS、Socket API 等。
- 文件系统 (FATFS/VFS): 支持在 SPI Flash 或外部存储设备上使用 FAT 文件系统。
- 加密库: 提供 AES、SHA、RSA 等加密算法的软件和硬件加速实现。
- HTTP/WebSocket/MQTT 等协议库: 方便构建网络应用。
- 应用程序: 用户编写的业务逻辑代码,运行在 FreeRTOS 的任务中,通过调用下层 API 实现功能。
2.2 、ESP-IDF 开发环境与工具链
- 工具链: 基于 GNU GCC 编译器(针对 Xtensa 或 RISC-V 架构)。
- 构建系统: 使用 CMake (早期版本使用 GNU Make)。开发者编写
CMakeLists.txt文件来定义项目结构、源文件、依赖组件等。 - 配置工具:
menuconfig。这是一个基于文本的图形化配置工具(类似于 Linux Kernel 的make menuconfig),用于配置 ESP-IDF 的众多选项,如:- 选择目标芯片型号
- 配置 Wi-Fi/BT 参数
- 调整 FreeRTOS 设置(任务栈大小、优先级等)
- 配置日志输出级别和方式
- 配置内存布局
- 启用/禁用特定功能和外设驱动
- 核心工具 -
idf.py: 这是 ESP-IDF 提供的命令行工具,用于执行构建、烧录、调试、监视串口输出等几乎所有开发任务。常用命令如:idf.py set-target esp32(设置目标芯片)idf.py menuconfig(启动配置工具)idf.py build(编译项目)idf.py -p PORT flash(烧录固件到设备,PORT 为串口,如 COM3 或 /dev/ttyUSB0)idf.py -p PORT monitor(启动串口监视器,查看设备日志输出)idf.py fullclean(彻底清理构建目录)
2.3 、ESP-IDF 开发流程简述
- 环境搭建: 在 Windows、Linux 或 macOS 上安装 ESP-IDF 开发环境(包括工具链、Python、Git 等)。
- 创建项目: 使用
idf.py create-project或复制示例项目模板。 - 编写代码: 在
main目录下编写应用程序代码 (通常是main.c或app_main()函数)。 - 配置项目: 运行
idf.py menuconfig根据需求进行配置。 - 编译项目: 运行
idf.py build生成可执行固件 (.bin 文件)。 - 烧录固件: 将 ESP32 开发板连接到电脑,运行
idf.py -p PORT flash将固件烧录到设备 Flash 中。 - 监视输出: 运行
idf.py -p PORT monitor查看设备运行日志,进行调试。可以使用ESP_LOGx(如ESP_LOGI,ESP_LOGE) 函数打印不同级别的日志。
2.4、 示例代码结构 (最简单的 Hello World)
c
#include "freertos/FreeRTOS.h"
#include "freertos/task.h"
#include "esp_log.h"
static const char *TAG = "MAIN";
void app_main(void)
{
while (1) {
ESP_LOGI(TAG, "Hello World!"); // 打印 Info 级别日志
vTaskDelay(pdMS_TO_TICKS(1000)); // 延时 1000 毫秒 (FreeRTOS 延时)
}
}2.5、 优势与特点
- 官方支持: 由芯片原厂维护,更新及时,与新芯片特性同步快。
- 功能全面: 提供对 ESP32 所有硬件特性和外设的底层访问。
- 性能优化: 针对 ESP32 硬件进行了深度优化(如 Wi-Fi/BT 共存)。
- 稳定性高: 经过大量商业产品验证。
- 社区活跃: 用户多,社区支持好,问题容易找到解决方案。
- 文档完善: 官方提供详尽的 API 参考指南、编程指南和示例代码。
- 模块化: 易于扩展和复用代码,方便管理大型项目。
- 开源免费: 基于 Apache 2.0 许可证。
2.6 、适用场景
ESP-IDF 适用于需要深度控制硬件、追求高性能、高稳定性或需要使用 ESP32 特有功能(如超低功耗协处理器 ULP)的应用开发。对于快速原型开发,也可以考虑基于 ESP-IDF 构建的更高级框架(如 Arduino for ESP32、MicroPython),但这些框架最终都依赖于 ESP-IDF 的底层功能。
3、总结
ESP-IDF 是开发 ESP32 系列芯片的强大、灵活且功能完备的官方框架。它提供了从硬件操作到网络协议栈的全套解决方案,结合 FreeRTOS 实现了高效的多任务处理。虽然其学习曲线相对陡峭,尤其是对于不熟悉嵌入式开发和 RTOS 的开发者,但它提供了最直接、最强大的方式来充分利用 ESP32 的潜力,是开发复杂或高性能 ESP32 应用的基石。掌握 idf.py 工具链和 menuconfig 配置是使用 ESP-IDF 的关键。
