前 言
本文档为Linux应用开发的指引文档,提供Linux应用开发环境、开发流程等说明,以及对平台关键技术及其支持情况进行简要介绍。
当前应用开发支持情况如下表所示。
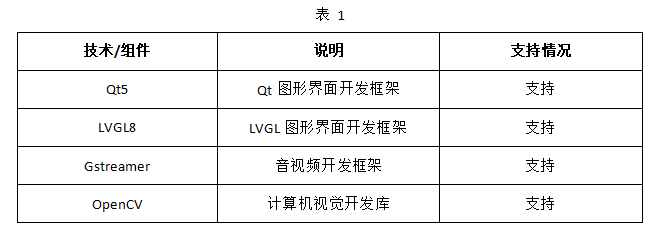
在完成开发环境搭建后,可参考本文的"Linux常用开发案例"章节熟悉基本的应用开发流程,然后可参考如下文档进行产品应用开发。
(1)图形界面开发:参考《图形用户界面(GUI)开发手册》,其中包含Qt和LVGL的开发指引;
(2)视频图像处理开发:参考《视频图像处理开发手册》;
(3)Docker开发:参考《Docker开发手册》,主要介绍Docker安装、构建镜像与下载镜像等;
(4)NPU开发:参考《NPU开发手册》;
(5)ROS2开发:参考《ROS2开发手册》,主要演示ROS系统(版本:ROS2 Humble)使用说明;
(6)Modbus开发:参考《Modbus开发手册》,主要介绍Modbus协议开发案例;
(7)EtherCAT主站开发:参考《EtherCAT开发手册》,主要演示EtherCAT主站的伺服电机实时控制。
开发环境
Windows开发环境:Windows10、Windows7 64bit
Linux开发环境:VMware16.2.5、Ubuntu20.04.6 64bit
系统版本:Tronlong-Desktop 20.04、Linux-5.10.209、U-Boot-2017.09
sysroot:rk3562-Tronlong-Desktop-20.04-sysroot-版本号.tar.gz
应用开发交叉编译工具:gcc-aarch64-linux-gnu_9.4.0.tar.gz
备注:本文基于2GByte LPDDR4X、16GByte eMMC配置单板机进行演示。
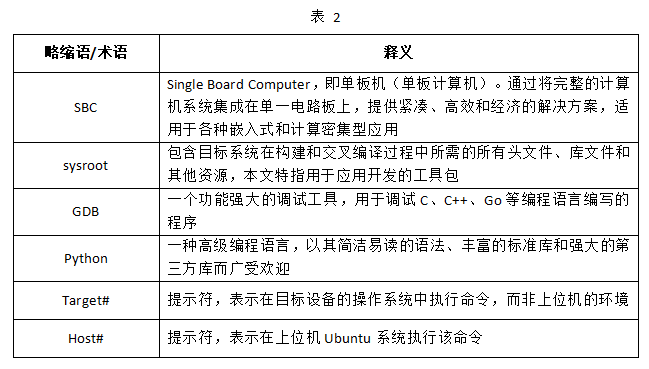
术语表
为便于阅读,下表对文档出现的关键术语进行解释;对于广泛认同释义的术语,在此不做注释。
注意事项
无特殊说明情况下,本文默认从eMMC启动系统,使用DEBUG作为调试串口,使用欣瑞达的XT070YTA23R_A6 LVDS电阻屏作为显示输出。
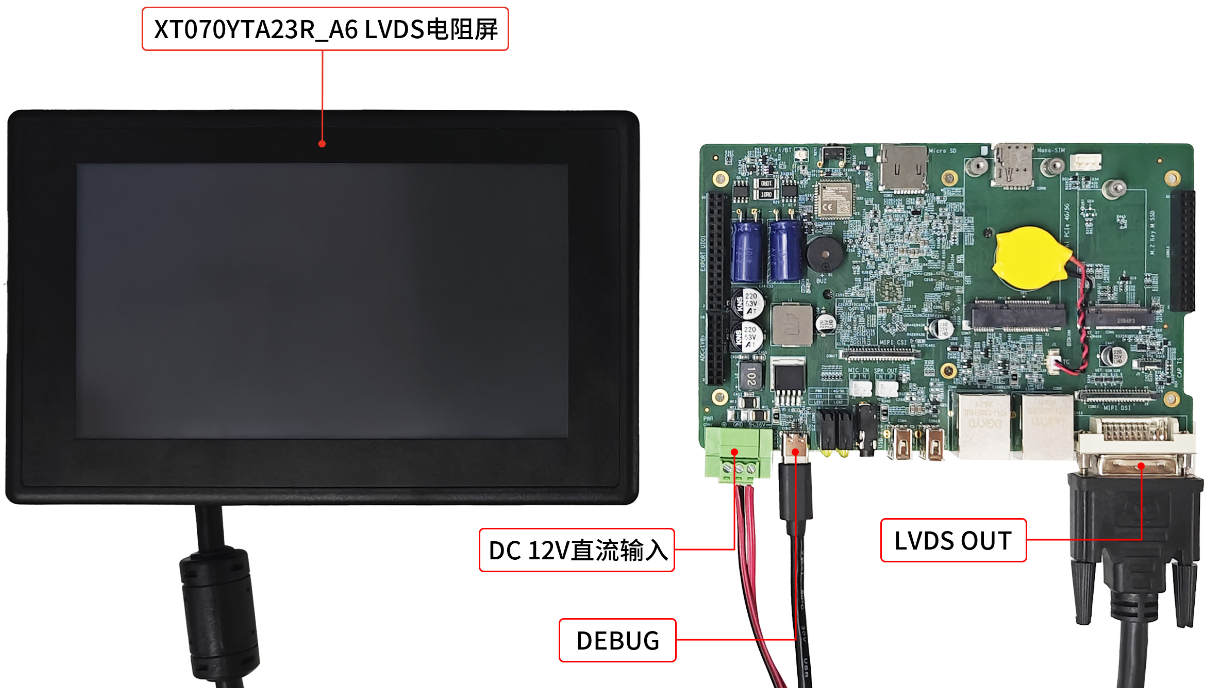
图1
1开发环境搭建说明
1.1安装应用开发交叉编译工具链
本文主要提供适配应用开发的交叉编译工具链安装方式,包括网络安装、本地安装,请根据实际环境选择其中一种方式进行安装。
(1)通过网络安装
**Host#**sudo apt update
**Host#**sudo apt install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu
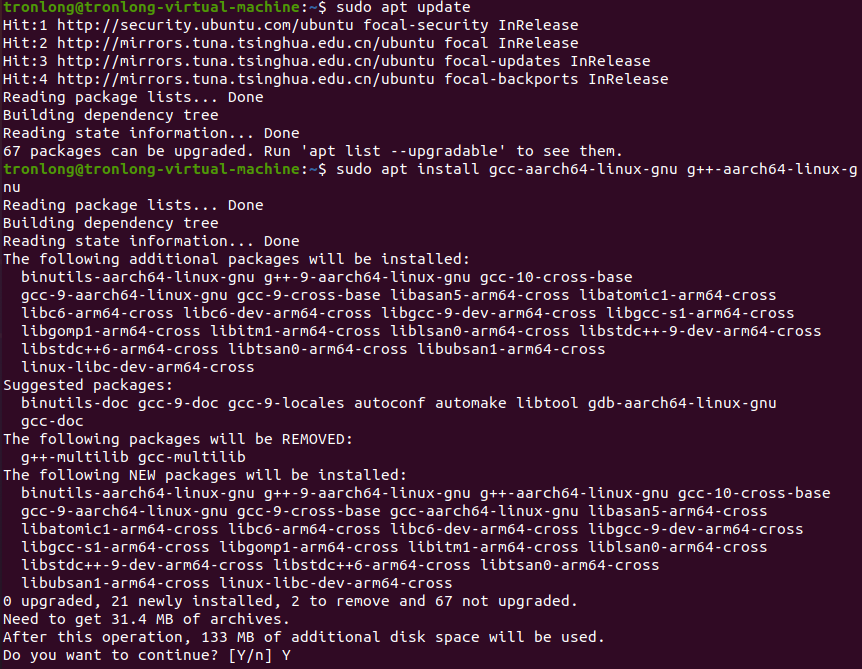
图2
图3
安装完成后,可执行如下命令查看交叉编译工具链版本号。
**Host#**aarch64-linux-gnu-gcc --version
**Host#**aarch64-linux-gnu-g++ --version
图4
可以看到交叉编译工具版本为9.4.0及以上版本即为安装成功,同时交叉编译工具链默认安装在"/usr/bin/"目录下。
**Host#**ls /usr/bin/aarch64-linux-gnu-*
图5
(2)本地安装
我司提供的交叉编译链压缩包位于产品资料"4-软件资料\Linux\Tools\"目录下,请将其拷贝至上位机Ubuntu系统任意路径,执行如下命令进行安装。
**Host#**tar -zxf gcc-aarch64-linux-gnu_9.4.0.tar.gz
**Host#**sudo dpkg -i gcc-aarch64-linux-gnu_9.4.0/*.deb
图6
图7
安装完成后,可执行如下命令查看具体版本号。
**Host#**aarch64-linux-gnu-gcc --version
**Host#**aarch64-linux-gnu-g++ --version
图8
可以看到交叉编译工具版本号为9.4.0及以上版本即为安装成功,同时应用交叉编译工具链默认安装在"/usr/bin/"目录下。
**Host#**ls /usr/bin/aarch64-linux-gnu-*
图9
1.2安装sysroot
我司提供的sysroot压缩包主要包含应用开发时所需的库(常用开发库、Qt库等),适用于Linux系统应用开发。
请将产品资料"4-软件资料\Linux\LinuxSDK\"目录下的sysroot压缩包拷贝至上位机Ubuntu系统"/home/tronlong/RK3562/"目录。执行如下命令,将其解压,解压完成后会在当前目录下生成一个"sysroot"目录和environment文件,"sysroot"目录包含sysroot相关文件。
备注:sysroot压缩包版本以实际情况为准。
**Host#**tar -zxf rk3562-Tronlong-Desktop-20.04-sysroot-v1.0.tar.gz

图10

图11
执行如下命令,设置交叉编译工具链和sysroot环境变量。
备注:由于Linux应用开发与Linux系统开发使用不同的交叉编译工具链,因此执行如下命令完成应用开发环境变量配置后,当前Terminal命令行终端将不再适用U-Boot、内核开发。如需进行U-Boot、内核开发,请另行打开一个Terminal命令行终端。
**Host#**source /home/tronlong/RK3562/environment
**Host#**export
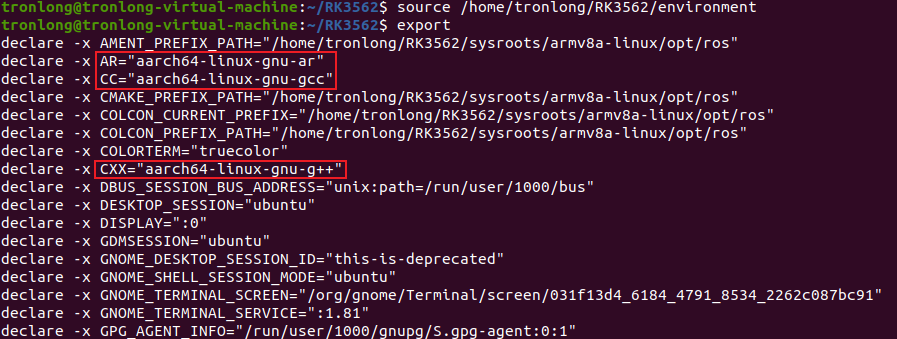
图12
图13
2 GDB调试说明
GDB为GNU推出的经典命令行调试工具,在Linux系统下广泛使用。它功能强大,能让开发者单步执行程序、逐过程或逐语句调试,自由跳入或跳出函数,还能按条件设置断点,实时查看变量值,精准定位程序问题。
GDB支持多种语言,包括汇编、C/C++、D、Fortran、GO、Objective-C、OpenCL等。此外,它有远程调试模式,在嵌入式系统调试中优势明显。借助TCP/IP协议及专有通信协议,可让调试程序的主机与运行程序的目标机跨设备协作,高效完成调试任务。
2.1调试环境搭建
在RK3562工作目录下执行如下命令,创建gdb-test目录并安装GDB调试工具。
**Host#**mkdir gdb-test
**Host#**sudo apt install gdb gdbserver gdb-multiarch -y
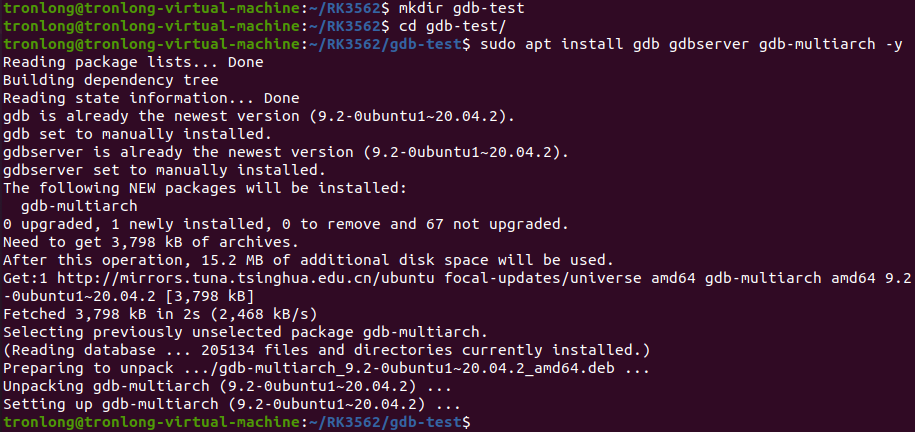
图14
2.2演示程序创建与编译
执行如下命令,进入gdb-test目录并新建一个GDB调试演示程序。
**Host#**cd gdb-test
**Host#**vi test.c

图15
输入以下内容:
#include <stdio.h>
void show() {
printf("show\n");
}
int main(int argc, char *argv\[\])
{
int arr4 = {1, 2, 3, 4};
int i = 0;
for (i = 0; i < 4; i++) {
printf("arr%d: %d\n", i, arri);
}
show();
return 0;
}
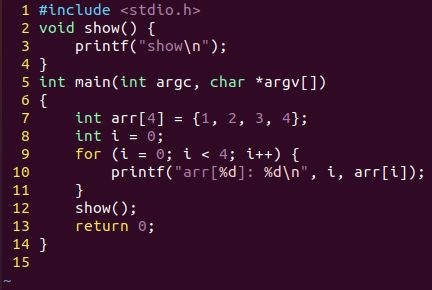
图16
执行如下命令,进行程序编译,编译完成将会生成test可执行程序。
**Host#**aarch64-linux-gnu-gcc -g test.c -o test
备注:编译时需添加-g参数,生成的可执行文件才带有调试信息。

图17
请将单板机与PC机连接至同一个路由器,使用Type-C线将单板机的DEBUG调试串口连接至PC机,然后将单板机上电启动。将编译后的test可执行文件拷贝至单板机系统任意目录下。
**Target#**ls
图18
2.3调试程序运行
执行如下命令,查看虚拟机的IP地址。
**Host#**ifconfig
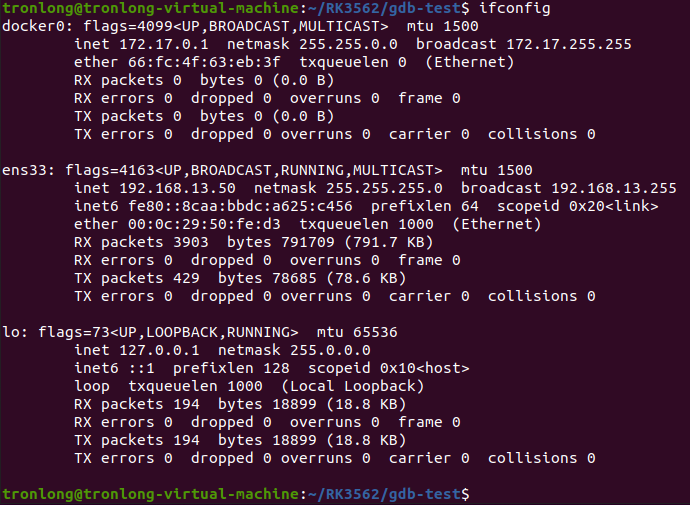
图19
在单板机系统test文件所在路径下,执行如下命令运行gdbserver程序,开启监听。
备注:192.168.13.50为虚拟机的IP地址;1234为连接的端口号(自行设置);test为将要进行调试的程序。
Target# gdbserver 192.168.13.50:1234 test

图20
在虚拟机系统test文件所在路径下,执行如下命令使用GDB调试工具进行调试。
**Host#**gdb-multiarch test
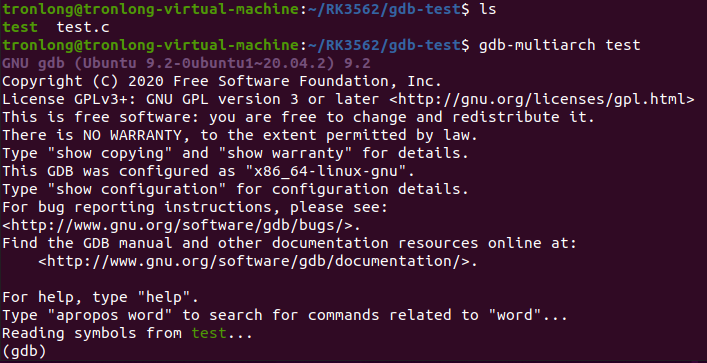
图21
执行如下命令,连接单板机。192.168.13.12为单板机的IP地址,请以实际情况为准。
**(gdb)**target remote 192.168.13.12:1234
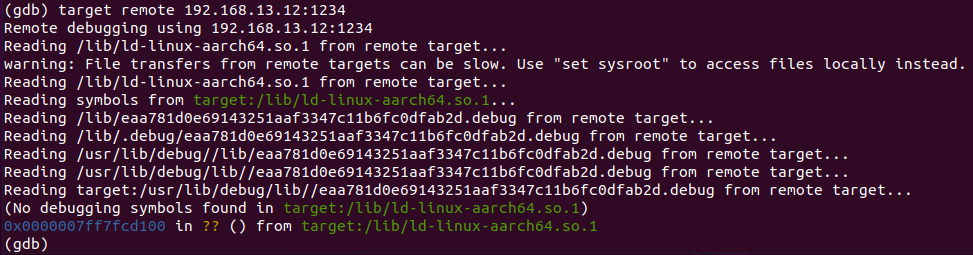
图22
同时,单板机DEBUG调试串口打印连接成功的相关信息。

图23
2.4程序调试
本章节主要演示GDB调试的几个常用命令的使用方法。
2.4.1 list命令
用于列出源码,简写:l。
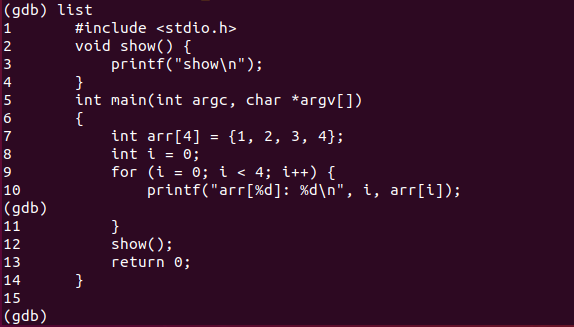
图24
2.4.2 break命令
用于设置断点,简写:b。
分别在main函数和第10行设置断点。
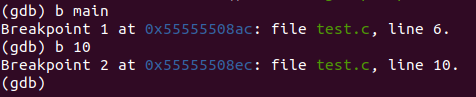
图25
2.4.3 info breakpoints命令
用于显示断点的状态,简写:info b。

图26
2.4.4 continue命令
用于恢复程序执行,简写:c。此命令使GDB恢复程序的执行,直至断点触发或程序结束。
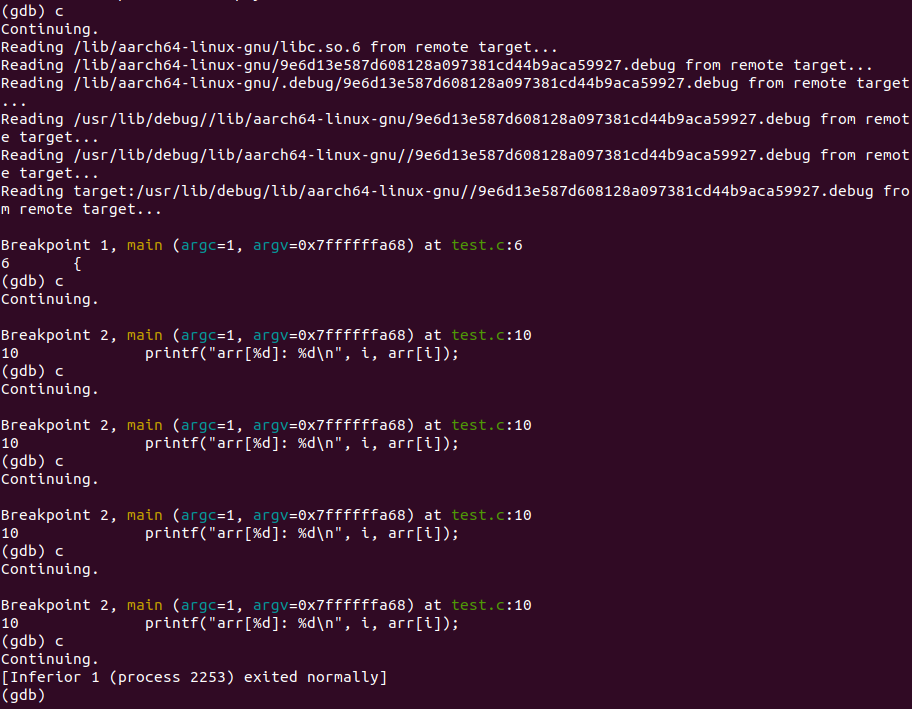
图27
以上调试过程在第二个断点中,每输入一次c命令,将会依次打印arr\[\]数组的元素值,然后程序执行结束。同时,单板机DEBUG调试串口打印相关信息。
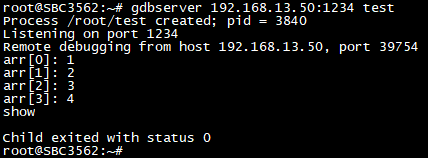
图28
2.4.5 print命令
用于打印变量或者变量地址,简写:p。
设置断点后,可依次打印当前变量i的值。
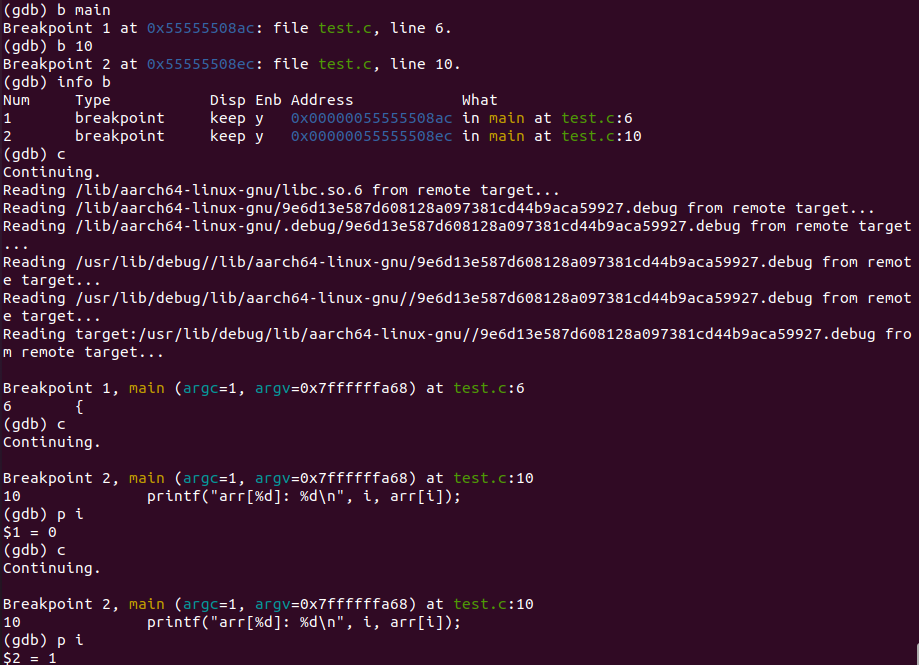
图29
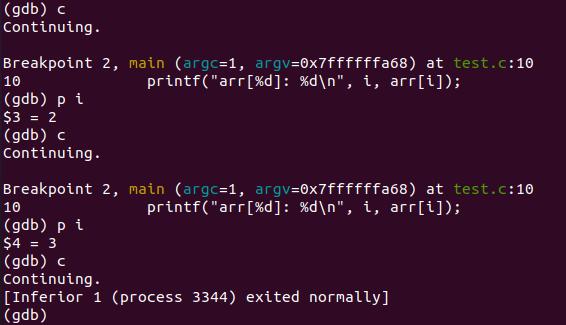
图30
以上调试过程在每处断点中,使用print命令打印变量i的值。同时,单板机DEBUG调试串口打印相关信息。
图31
2.4.6 quit命令
退出GDB模式,简写:q。当程序调试完成后,使用quit命令退出GDB调试。

图32
同时,单板机DEBUG调试串口打印相关信息。
图33