引言:操作系统的"交通警察"
想象一下,你是一个繁忙路口的交通警察,同时面对:
🚑 救护车:需要立即通过(高抢占优先级)
🚒 消防车:也很紧急,但可以稍等(中抢占优先级)
🚗 普通汽车:按顺序通行(低抢占优先级)
🚶 行人:最低优先级,但要保证安全(响应优先级)
这就是操作系统任务调度的真实写照!抢占优先级决定谁能"插队",响应优先级确保每个人都能"安全过马路"。
第一部分:基本概念解析
一、什么是优先级?
在操作系统中,优先级就像任务的"VIP等级":
- **高优先级任务:**像急诊病人,立即处理
- **低优先级任务:**像普通门诊,排队等待
两种优先级的本质区别
| 特性 | 抢占优先级 | 响应优先级 |
| 关注点 | 谁能打断别人 | 谁需要快速响应 |
| 好比 | 插队权利 | 谁需要快速响应 |
| 目标 | 高重要性任务优先执行 | 所有任务都能及时响应 |
| 风险 | 低优先级任务可能"饿死" | 系统吞吐量可能下降 |
|---|
第二部分:抢占优先级------"插队"的艺术
1. 工作原理:谁有权利打断别人
cs
// 抢占优先级调度示例
void 任务调度示例() {
while (true) {
// 检查是否有更高优先级的任务就绪
if (有更高优先级任务就绪()) {
保存当前任务状态();
切换到更高优先级任务(); // 抢占发生!
}
// 执行当前任务
执行当前任务();
// 任务完成或主动让出CPU
if (任务完成() || 主动让出CPU()) {
切换到下一个就绪任务();
}
}
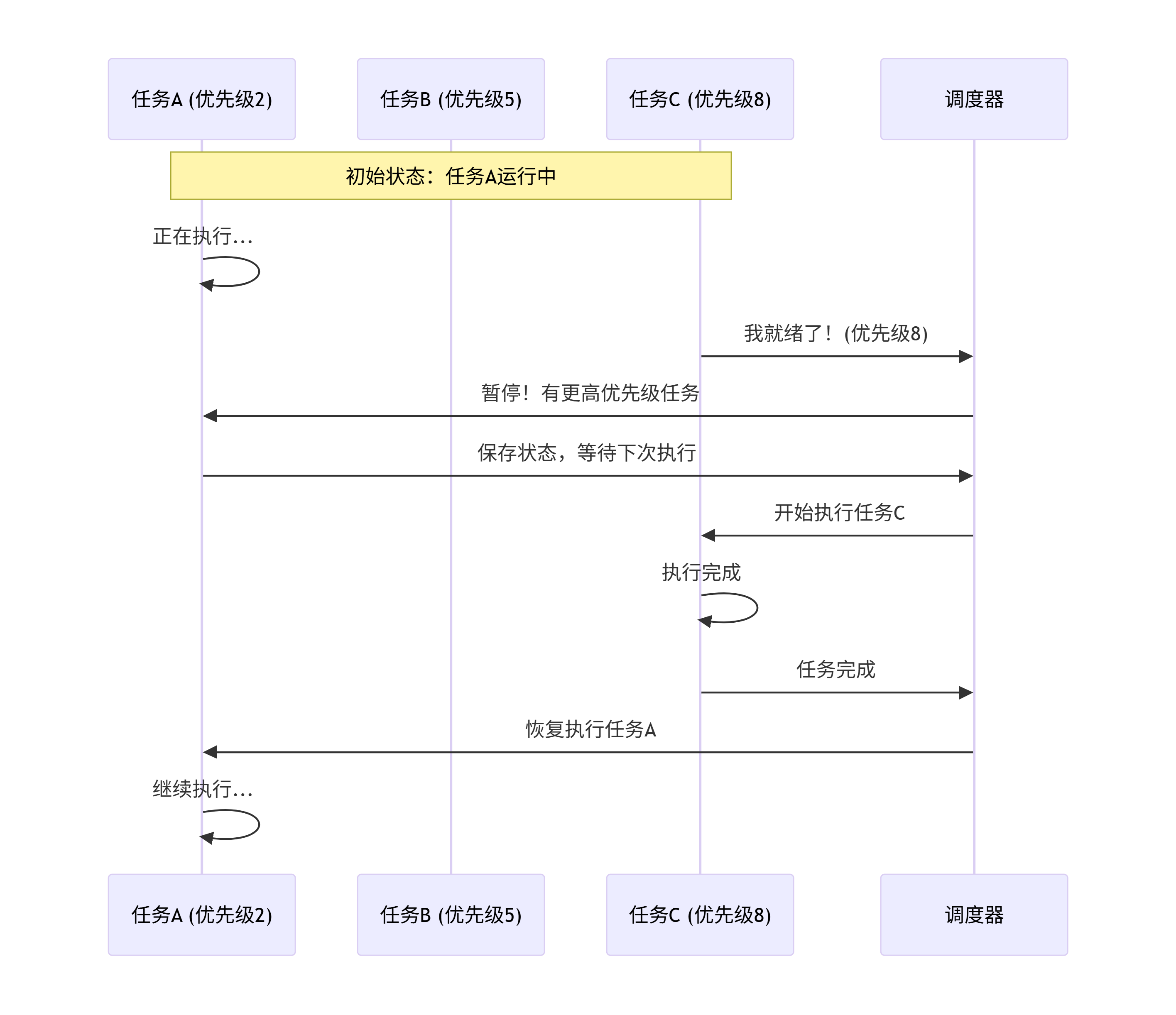
}2. 可视化抢占过程
3. 实际代码示例
cs
#include <stdio.h>
#include <pthread.h>
#include <unistd.h>
// 创建互斥锁和条件变量
pthread_mutex_t mutex = PTHREAD_MUTEX_INITIALIZER;
void* 高优先级任务(void* arg) {
struct sched_param param;
param.sched_priority = 90; // 设置高优先级
pthread_setschedparam(pthread_self(), SCHED_FIFO, ¶m);
printf("🚀 高优先级任务开始执行\n");
pthread_mutex_lock(&mutex);
printf("🔒 高优先级任务获得锁\n");
sleep(1); // 模拟工作
printf("🔓 高优先级任务释放锁\n");
pthread_mutex_unlock(&mutex);
printf("✅ 高优先级任务完成\n");
return NULL;
}
void* 低优先级任务(void* arg) {
struct sched_param param;
param.sched_priority = 10; // 设置低优先级
pthread_setschedparam(pthread_self(), SCHED_FIFO, ¶m);
printf("🐢 低优先级任务开始执行\n");
pthread_mutex_lock(&mutex);
printf("🔒 低优先级任务获得锁\n");
sleep(2); // 模拟工作
printf("🔓 低优先级任务释放锁\n");
pthread_mutex_unlock(&mutex);
printf("✅ 低优先级任务完成\n");
return NULL;
}
int main() {
pthread_t t1, t2;
printf("=== 抢占优先级演示 ===\n");
// 先创建低优先级任务
pthread_create(&t1, NULL, 低优先级任务, NULL);
usleep(100000); // 稍微延迟,确保低优先级任务先运行
// 再创建高优先级任务
pthread_create(&t2, NULL, 高优先级任务, NULL);
pthread_join(t1, NULL);
pthread_join(t2, NULL);
return 0;
}4. 运行结果预测:
cs
=== 抢占优先级演示 ===
🐢 低优先级任务开始执行
🔒 低优先级任务获得锁
🚀 高优先级任务开始执行
(高优先级任务等待锁释放...)
🔓 低优先级任务释放锁
🔒 高优先级任务获得锁
🔓 高优先级任务释放锁
✅ 高优先级任务完成
✅ 低优先级任务完成5. 抢占优先级的优缺点
优点:
✅ 紧急任务立即响应
✅ 系统响应性高
✅ 适合实时系统
缺点:
❌ 低优先级任务可能"饿死"
❌ 优先级反转问题
❌ 调试困难
第三部分:响应优先级------"公平"的智慧
1. 工作原理:确保每个人都有机会
响应优先级关注的是等待时间而非打断权利。就像银行叫号系统:
cs
// 响应优先级调度示例(类似Linux CFS)
void 响应优先级调度() {
while (true) {
// 选择等待时间最长的就绪任务
任务 = 选择虚拟运行时间最小的任务();
// 执行该任务
执行任务(任务);
// 更新任务的虚拟运行时间
任务.虚拟运行时间 += 实际运行时间 / 任务.权重;
// 如果任务运行时间用完或主动让出,重新调度
if (任务需要重新调度()) {
将任务放回就绪队列();
}
}
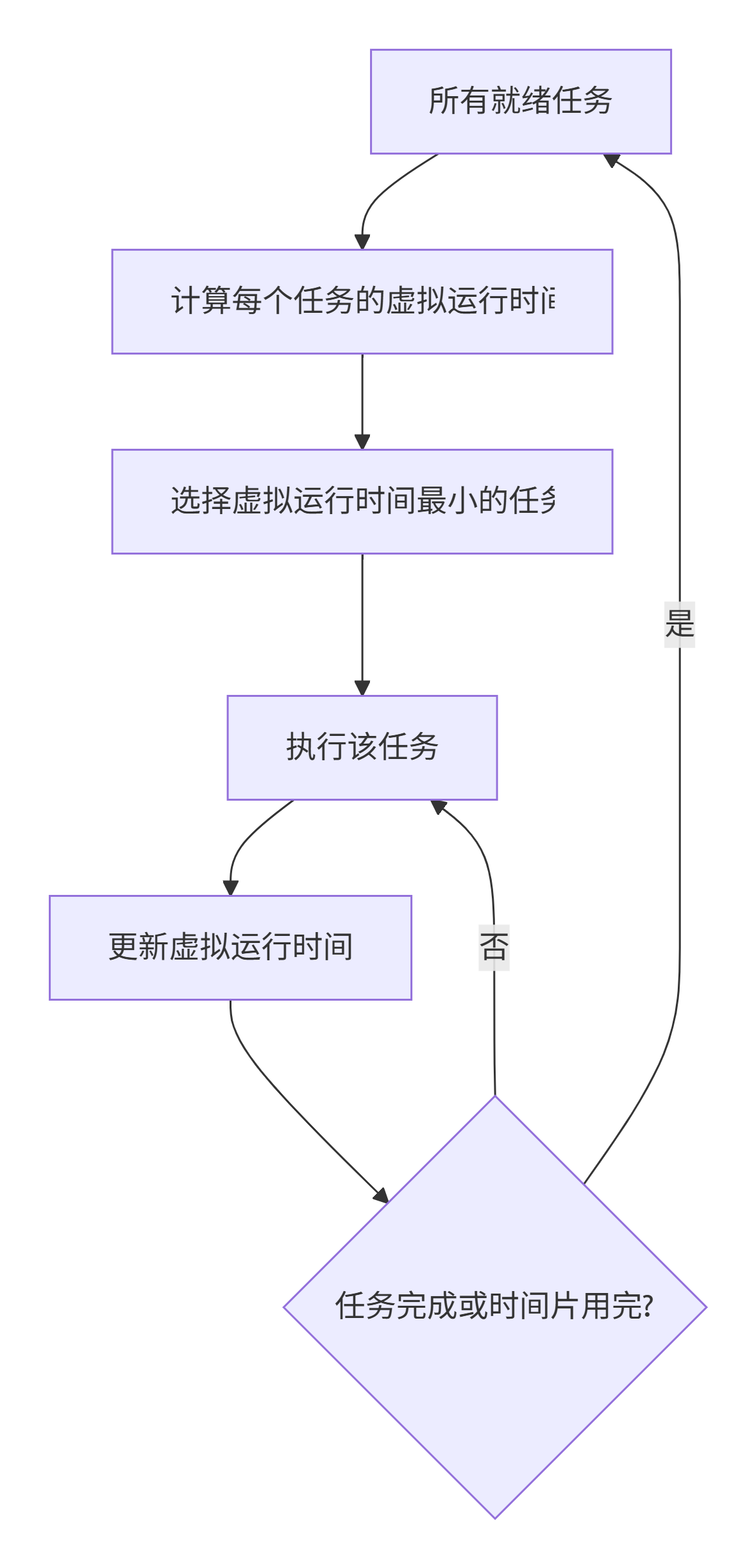
}2. 响应优先级的核心:完全公平调度器(CFS)
3. 实际实现示例
cs
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
// 简单的响应优先级调度模拟
#define MAX_TASKS 10
typedef struct {
int pid; // 任务ID
int nice; // 友好值(-20到19)
long vruntime; // 虚拟运行时间
int weight; // 权重(根据nice计算)
int executed; // 已执行时间
} Task;
Task tasks[MAX_TASKS];
int task_count = 0;
// 根据nice值计算权重
int calculate_weight(int nice) {
// 简化版权重计算(实际Linux更复杂)
return 1024 + nice * 10;
}
void add_task(int pid, int nice) {
if (task_count >= MAX_TASKS) return;
tasks[task_count].pid = pid;
tasks[task_count].nice = nice;
tasks[task_count].weight = calculate_weight(nice);
tasks[task_count].vruntime = 0;
tasks[task_count].executed = 0;
task_count++;
printf("➕ 添加任务%d, nice=%d, 权重=%d\n", pid, nice, tasks[task_count-1].weight);
}
// 选择下一个要运行的任务(虚拟运行时间最小)
Task* pick_next_task() {
if (task_count == 0) return NULL;
Task* next = &tasks[0];
for (int i = 1; i < task_count; i++) {
if (tasks[i].vruntime < next->vruntime) {
next = &tasks[i];
}
}
return next;
}
// 模拟调度
void simulate_scheduler(int time_slices) {
printf("\n=== 开始响应优先级调度模拟 ===\n");
for (int slice = 0; slice < time_slices; slice++) {
Task* task = pick_next_task();
if (!task) break;
printf("⏰ 时间片%d: 执行任务%d (vruntime=%ld)\n",
slice, task->pid, task->vruntime);
// 模拟执行
task->executed++;
// 更新虚拟运行时间:实际运行时间 * (基准权重 / 任务权重)
// 权重越大的任务,虚拟运行时间增长越慢
task->vruntime += (1024 * 1000) / task->weight;
// 模拟任务完成
if (task->executed >= 3) {
printf("✅ 任务%d完成!总执行时间:%d\n", task->pid, task->executed);
// 从队列移除(简化处理)
task->vruntime = 9999999; // 设为很大值,不再调度
}
}
}
int main() {
// 添加不同nice值的任务
add_task(1, 0); // 普通优先级
add_task(2, -5); // 较高优先级(权重更大)
add_task(3, 10); // 较低优先级(权重更小)
simulate_scheduler(10);
return 0;
}4. 运行结果示例:
cs
➕ 添加任务1, nice=0, 权重=1024
➕ 添加任务2, nice=-5, 权重=974
➕ 添加任务3, nice=10, 权重=1124
=== 开始响应优先级调度模拟 ===
⏰ 时间片0: 执行任务2 (vruntime=0)
⏰ 时间片1: 执行任务1 (vruntime=0)
⏰ 时间片2: 执行任务2 (vruntime=1051)
⏰ 时间片3: 执行任务3 (vruntime=0)
⏰ 时间片4: 执行任务1 (vruntime=1000)
⏰ 时间片5: 执行任务2 (vruntime=2102)
✅ 任务2完成!总执行时间:3
⏰ 时间片6: 执行任务3 (vruntime=911)
⏰ 时间片7: 执行任务1 (vruntime=2000)
✅ 任务1完成!总执行时间:3
⏰ 时间片8: 执行任务3 (vruntime=1822)
⏰ 时间片9: 执行任务3 (vruntime=2733)
✅ 任务3完成!总执行时间:35. 响应优先级的优缺点
优点:
✅ 公平性:所有任务都能获得CPU时间
✅ 防止饥饿:低优先级任务不会被饿死
✅ 适合通用操作系统
缺点:
❌ 实时性较差:紧急任务不能立即响应
❌ 调度开销较大:需要维护更多状态信息
第四部分:两者对比与选择策略
1. 选择对比表
| | 抢占优先级 | 响应优先级 |
| 调度目标 | 响应紧急任务 | 公平分配CPU时间 |
| 适用场景 | 实时系统、嵌入式系统 | 通用操作系统、桌面系统 |
| 任务饿死 | 可能发生 | 几乎不会发生 |
| 实现复杂度 | 相对简单 | 相对复杂 |
| 系统开销 | 上下文切换频繁 | 调度计算开销大 |
| 典型代表 | VxWorks, FreeRTOS | Linux CFS, Windows |
|---|
2. 如何选择合适的策略?
cs
// 决策流程
if (系统类型 == 实时系统) {
// 使用抢占优先级
设置调度策略(SCHED_FIFO 或 SCHED_RR);
设置任务优先级(根据紧急程度);
} else if (系统类型 == 通用操作系统) {
// 使用响应优先级
设置调度策略(SCHED_NORMAL);
设置nice值(影响权重);
} else if (需要混合策略) {
// 实时任务用抢占优先级,普通任务用响应优先级
实时任务.调度策略 = SCHED_FIFO;
普通任务.调度策略 = SCHED_NORMAL;
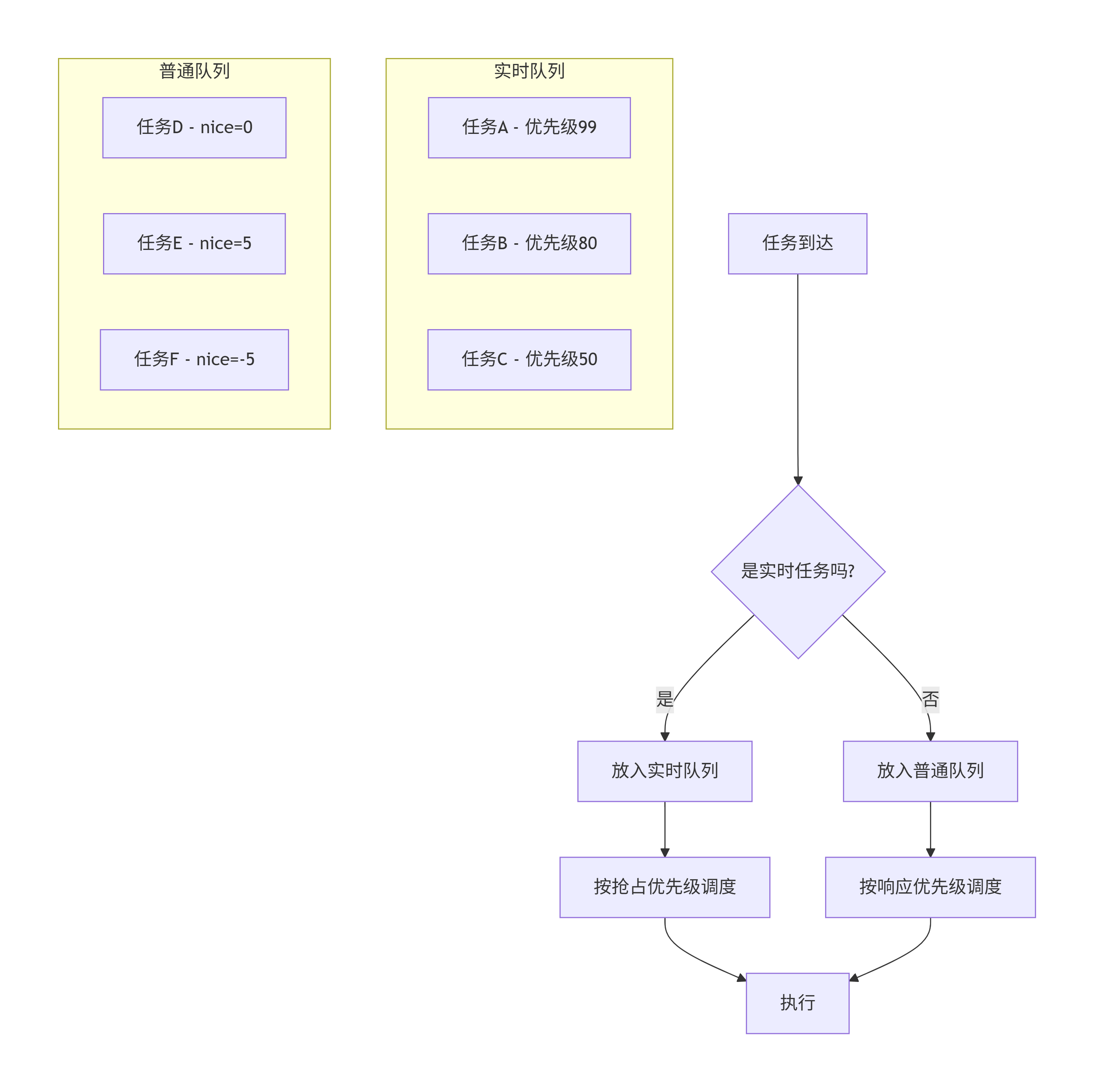
}3. 混合调度策略
现代操作系统通常采用混合方法:
第五部分:实际问题与解决方案
问题1:优先级反转
**场景:**低优先级任务L获得锁;中优先级任务M就绪,抢占L;高优先级任务H需要同一个锁,被阻塞
结果: 高优先级任务H被中优先级任务M阻塞解决方案:
cs
// 优先级继承协议
void 优先级继承示例() {
// 当高优先级任务等待低优先级任务持有的锁时
if (高优先级任务等待锁 && 锁被低优先级任务持有) {
// 临时提升低优先级任务的优先级
临时优先级 = 高优先级任务的优先级;
设置任务优先级(锁持有者, 临时优先级);
// 锁释放后恢复原始优先级
锁释放时恢复优先级();
}
}
// 优先级天花板协议
void 优先级天花板示例() {
// 为每个锁设置天花板优先级
锁.天花板优先级 = 可能访问该锁的最高任务优先级;
// 任务获取锁时自动提升到天花板优先级
when (任务获取锁(锁)) {
原优先级 = 当前任务.优先级;
当前任务.优先级 = max(当前任务.优先级, 锁.天花板优先级);
}
// 释放锁时恢复原优先级
when (任务释放锁(锁)) {
当前任务.优先级 = 原优先级;
}
}问题2:多核负载均衡
cs
// 多核系统中的优先级调度考虑
void 多核负载均衡() {
for (每个CPU核心) {
// 检查负载
if (当前核心.负载 > 阈值) {
// 迁移一些任务到其他核心
迁移任务 = 选择可迁移任务(当前核心);
if (迁移任务) {
将任务迁移到负载较低的核心(迁移任务);
}
}
}
// 新任务就绪时,选择最合适的核心
when (新任务就绪) {
目标核心 = 选择负载最低且符合亲和性的核心();
将任务分配给核心(新任务, 目标核心);
}
}第六部分:实际应用案例
案例1:自动驾驶系统
cs
// 自动驾驶中的优先级设置
void 自动驾驶任务调度() {
// 最高优先级:紧急制动、碰撞检测
创建任务(紧急制动处理, 优先级=99, 调度策略=SCHED_FIFO);
// 高优先级:路径规划、传感器融合
创建任务(路径规划, 优先级=80, 调度策略=SCHED_FIFO);
// 中优先级:地图更新、通信
创建任务(地图更新, 优先级=50, 调度策略=SCHED_RR);
// 低优先级:日志记录、诊断
创建任务(日志记录, 优先级=10, 调度策略=SCHED_NORMAL);
}案例2:Web服务器
cs
// Web服务器任务调度
void 服务器任务调度() {
// 实时任务:网络数据包处理
创建任务(网络中断处理, 优先级=90, 调度策略=SCHED_FIFO);
// 高响应:用户请求处理
创建任务(请求处理, nice=-10, 调度策略=SCHED_NORMAL);
// 普通任务:日志、统计
创建任务(访问日志, nice=0, 调度策略=SCHED_NORMAL);
// 后台任务:数据备份、清理
创建任务(数据备份, nice=10, 调度策略=SCHED_NORMAL);
}总结:平衡的艺术
抢占优先级和响应优先级代表了任务调度的两种哲学:
抢占优先级:" 让重要的先来"
→ 适合确定性要求高的场景
响应优先级:" 大家都有机会"
→ 适合公平性要求高的场景
关键取舍:
在实时性和公平性之间找到平衡点,就像在效率和公平之间寻找社会的最佳运行方式。
实践建议:
了解你的系统需求:实时系统选抢占,通用系统选响应
合理设置优先级:不要滥用高优先级
注意优先级反转:使用优先级继承或天花板协议
监控系统行为:确保没有任务饿死或响应不及时
记住:没有"最好"的调度策略,只有"最适合"当前场景的策略。理解这两种优先级的工作原理,能帮助你在设计系统时做出更明智的选择。
**思考题:**如果你要设计一个智能家居系统,需要同时处理紧急的安防报警和日常的温度调节,你会如何设计任务的优先级?欢迎在评论区分享你的设计方案!