仿真对于开发地面站至关重要,很久以前都是使用linux环境搭建软件仿真环境,但其实mp自带了windows下得仿真环境,虽然官方不推荐,但是对于开发软件流程来说,足够了。
https://ardupilot.org/dev/docs/sitl-native-on-windows.html
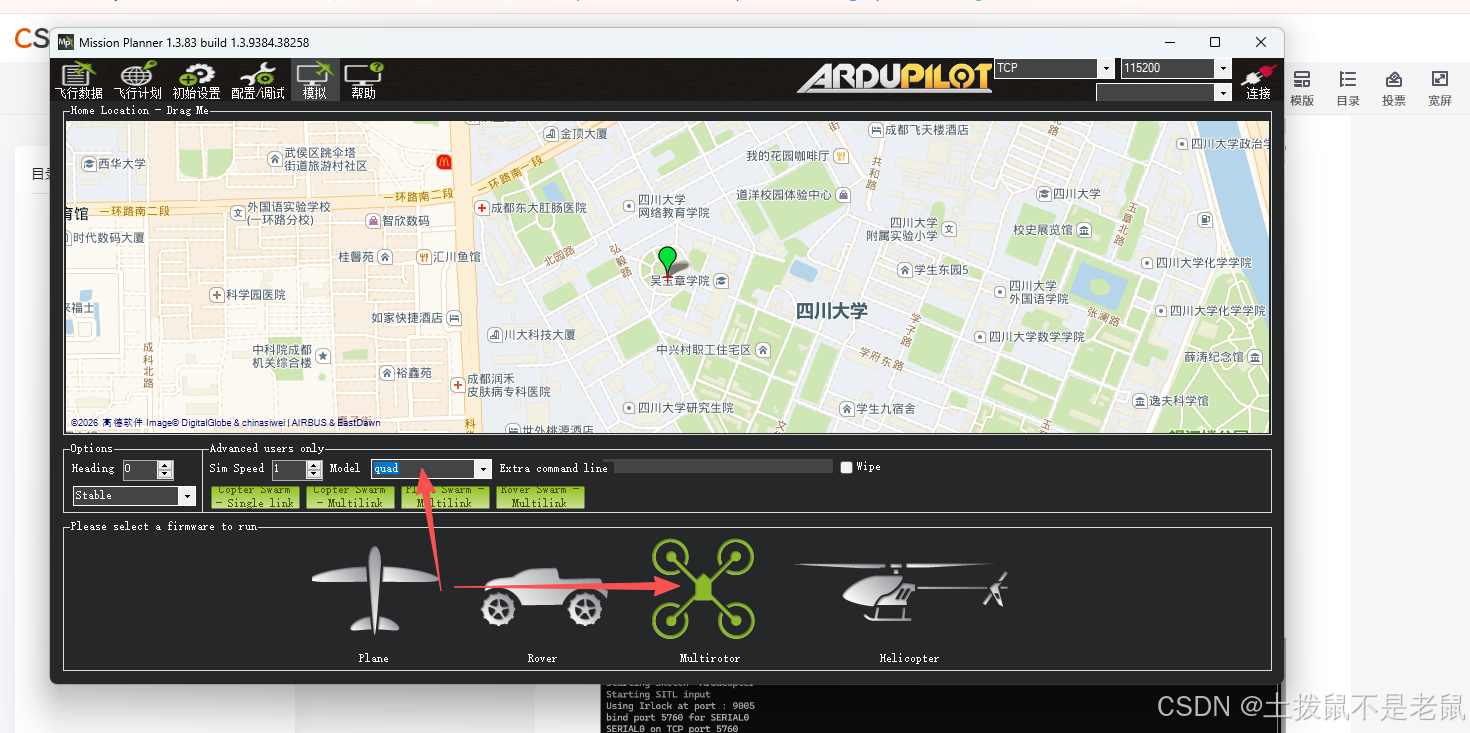
1,再mp里选择机型,机架 ,它会自动给下载到 如下目录
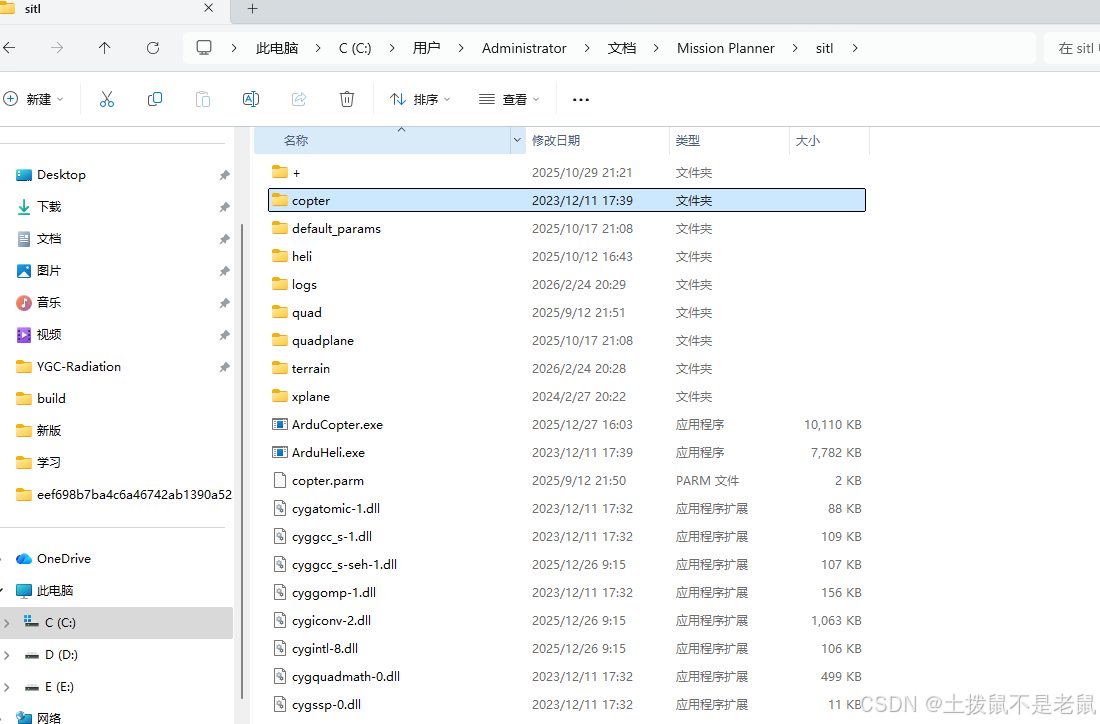
2,我们把整个文件夹拷贝出来,终端下 执行指令 就可以启动仿真了

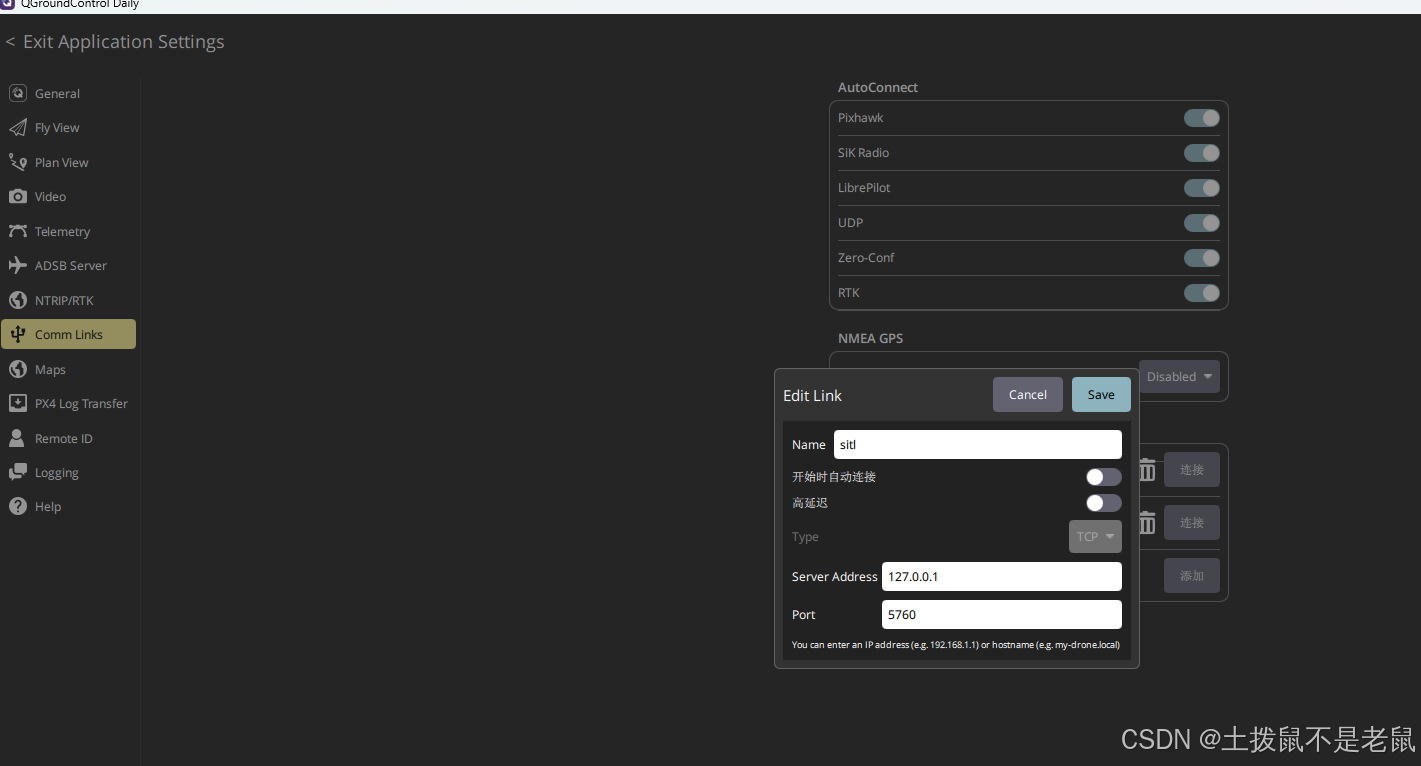
3,地面站 使用tcp 建立链接,即可 进行软件流程得测试
仿真对于开发地面站至关重要,很久以前都是使用linux环境搭建软件仿真环境,但其实mp自带了windows下得仿真环境,虽然官方不推荐,但是对于开发软件流程来说,足够了。
https://ardupilot.org/dev/docs/sitl-native-on-windows.html
1,再mp里选择机型,机架 ,它会自动给下载到 如下目录
2,我们把整个文件夹拷贝出来,终端下 执行指令 就可以启动仿真了
3,地面站 使用tcp 建立链接,即可 进行软件流程得测试