【笔记】OpenClaw 生态系统的多语言实现对比分析
目标读者:有一定技术基础,想了解不同技术栈选型的开发者
目录
1. 概述
1.1 为什么有多个版本?
OpenClaw 作为开源项目,引发了社区的广泛关注和参与。开发者们基于不同的需求和技术偏好,使用各种编程语言重新实现了 OpenClaw 的核心功能,形成了丰富的 "xxxClaw" 生态系统。

1.2 各版本的基本定位
| 版本 | 语言 | 核心定位 | GitHub 组织 |
|---|---|---|---|
| OpenClaw | TypeScript | 功能最全的原版,适合桌面和服务器 | openclaw |
| ZeroClaw | Rust | 极致性能、最小资源占用 | zeroclaw-labs |
| PicoClaw | Go | 嵌入式友好、单文件部署 | SipeedIO |
| NanoBot | Python | 简洁学习版、代码清晰 | xubinrencs |
| QuantClaw | C++ | 高性能复刻版 | - |
| MimiClaw | C | 极简 C 实现 | - |
2. 版本总览
2.1 一眼看清各版本
xxxClaw 生态系统对比
| 指标 | OpenClaw | ZeroClaw | PicoClaw | NanoBot | 其他变体 |
|---|---|---|---|---|---|
| 语言 | TypeScript | Rust | Go | Python | C/C++ |
| 内存占用 | >1GB | <5MB | <10MB | >100MB | - |
| 启动时间 | >500s | <10ms | <1s | >30s | - |
| 二进制 | - | 3.4MB | 单文件 | - | - |
| 功能完整度 | ⭐⭐⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐⭐ | ⭐⭐ | ⭐⭐ |
| 学习曲线 | 中等 | 陡峭 | 中等 | 平缓 | 陡峭 |
| 生态成熟度 | 成熟 | 发展中 | 发展中 | 学习版 | 实验中 |
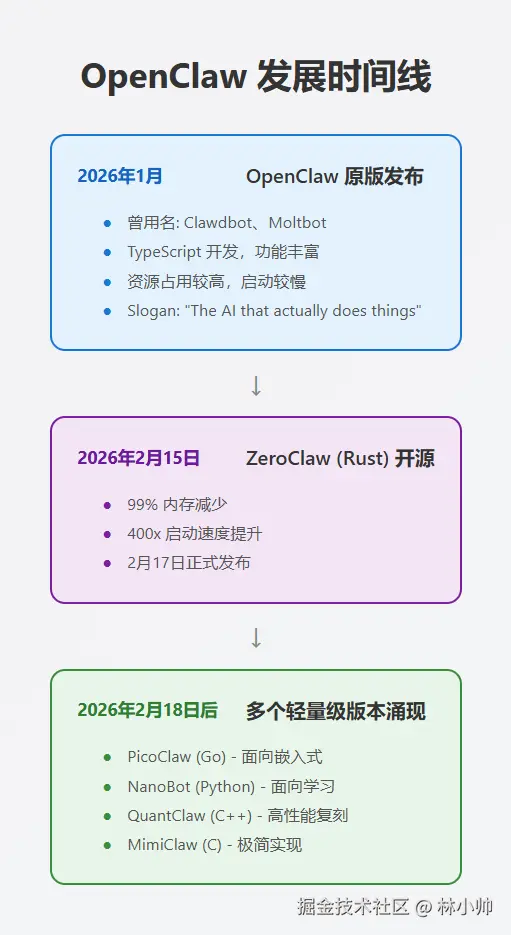
2.2 发展时间线
3. 详细对比分析
3.1 OpenClaw (TypeScript) - 原版
核心特点
| 版本 | 优势 | 劣势 |
|---|---|---|
| OpenClaw | ✅ 功能最丰富(3000+ 技能插件) ✅ 生态最成熟(活跃社区支持) ✅ 文档最完善(中英文文档齐全) ✅ 扩展性强(完整的 Extension 机制) ✅ 可视化支持(Canvas 工作流编排) | ❌ 内存占用大(>1GB) ❌ 启动慢(>500s) ❌ 依赖多(node_modules 庞大) ❌ 需要 Node.js 环境 |
技术架构
less
Node.js 运行时
│
├── pi-mono 引擎
│ ├── pi-ai (LLM 抽象)
│ ├── pi-agent-core (Agent 核心)
│ └── pi-coding-agent (CLI)
│
├── 消息平台集成
│ ├── Slack (@slack/bolt)
│ ├── Telegram (grammy)
│ ├── WhatsApp (@whiskeysockets/baileys)
│ ├── Discord (discord-api-types)
│ └── 飞书/钉钉
│
└── 工具能力层
├── Playwright (浏览器)
├── Sharp (图片)
├── node-pty (终端)
└── PDF.js (PDF)适用场景
| 场景 | 适用性 | 说明 |
|---|---|---|
| 桌面办公 | ⭐⭐⭐⭐⭐ | 功能最全,适合日常使用 |
| 服务器部署 | ⭐⭐⭐ | 资源占用较高 |
| 开发辅助 | ⭐⭐⭐⭐⭐ | 丰富的开发工具集成 |
| 学习研究 | ⭐⭐⭐⭐ | 文档齐全,社区活跃 |
| 嵌入式/移动 | ❌ | 资源占用太高 |
3.2 ZeroClaw (Rust) - 极致性能
核心特点
| 版本 | 优势 | 劣势 |
|---|---|---|
| ZeroClaw | ✅ 极致性能(<10ms 启动) ✅ 内存安全(Rust 保证) ✅ 极小体积(~3.4MB 二进制) ✅ 无运行时依赖(单文件部署) ✅ 跨平台编译(一份代码多平台) | ❌ 学习曲线陡峭(Rust 难学) ❌ 生态较新(插件和扩展较少) ❌ 部分功能缺失(如 TTS) ❌ 开发效率相对较低 |
性能对比
scss
资源占用对比(相对值)
────────────────────────────────────────────────────────
OpenClaw (1.5GB) ████████████████████████████████ 100%
NanoBot (100MB) ███ 7%
PicoClaw (10MB) ▌ 0.7%
ZeroClaw (5MB) ▏ 0.3%
启动时间对比(相对值)
────────────────────────────────────────────────────────
OpenClaw (500s) ████████████████████████████████ 100%
NanoBot (30s) ██ 6%
PicoClaw (1s) ▏ 0.2%
ZeroClaw (0.01s) ▏ 0.002%适用场景
| 场景 | 适用性 | 说明 |
|---|---|---|
| 低配服务器 | ⭐⭐⭐⭐⭐ | 极低资源占用 |
| Raspberry Pi | ⭐⭐⭐⭐⭐ | ARM 架构支持良好 |
| 高性能需求 | ⭐⭐⭐⭐⭐ | Rust 的性能优势 |
| 快速迭代开发 | ⭐⭐ | Rust 开发效率较低 |
| 企业生产 | ⭐⭐⭐⭐ | 稳定性和安全性高 |
3.3 PicoClaw (Go) - 嵌入式友好
核心特点
| 版本 | 优势 | 劣势 |
|---|---|---|
| PicoClaw | ✅ 单文件部署(编译后一个二进制) ✅ 嵌入式友好(面向 RISC-V 开发板) ✅ 启动快(<1s) ✅ 并发能力强(Go 的 goroutine) ✅ 跨平台编译简单 | ❌ 功能相对精简 ❌ 生态不如 Rust/Node.js ❌ 性能不如 Rust ❌ 社区较小 |
技术亮点
- 在 $10 嵌入式硬件上运行
- 支持 RISC-V 架构
- 单文件部署,无需依赖
- Termux/Android 兼容
适用场景
| 场景 | 适用性 | 说明 |
|---|---|---|
| 嵌入式设备 | ⭐⭐⭐⭐⭐ | 专为嵌入式设计 |
| Android/Termux | ⭐⭐⭐⭐⭐ | 单文件,适合移动 |
| ARM 设备 | ⭐⭐⭐⭐⭐ | 跨平台编译简单 |
| 快速开发 | ⭐⭐⭐ | Go 开发效率较高 |
| 高性能场景 | ⭐⭐⭐ | 性能不如 Rust |
3.4 NanoBot (Python) - 学习版
核心特点
| 版本 | 优势 | 劣势 |
|---|---|---|
| NanoBot | ✅ 代码简洁(~4000 行) ✅ 易于理解(清晰的结构) ✅ 快速原型(Python 开发效率高) ✅ 学习友好(适合 AI Agent 入门) ✅ 生态丰富(Python 海量库) | ❌ 性能较低 ❌ 内存占用较高 ❌ 启动慢(>30s) ❌ 不适合生产环境 |
设计理念
- 99% 代码精简(相比 OpenClaw)
- 清晰的代码结构
- 注重可读性而非性能
- 适合学习 AI Agent 原理
适用场景
| 场景 | 适用性 | 说明 |
|---|---|---|
| 学习 AI Agent | ⭐⭐⭐⭐⭐ | 代码清晰易懂 |
| 快速原型 | ⭐⭐⭐⭐ | Python 开发快 |
| 教学演示 | ⭐⭐⭐⭐⭐ | 适合讲解 |
| 生产部署 | ⭐⭐ | 性能和内存不足 |
| 性能敏感 | ❌ | 不推荐 |
3.5 其他变体
QuantClaw (C++)
- 特点:C++ 高性能复刻版
- 优势:接近 Rust 的性能
- 劣势:开发效率低,内存不安全
- 适用:对性能极度敏感的场景
MimiClaw (C)
- 特点:极简 C 语言实现
- 优势:体积最小,最底层
- 劣势:开发难度高,功能有限
- 适用:极致资源受限环境
4. 架构设计对比
4.1 分层架构对比
表一:OpenClaw vs ZeroClaw
| 层级 | OpenClaw (TypeScript) | ZeroClaw (Rust) |
|---|---|---|
| 1 | 用户层 (Slack/Telegram/Discord...) | 用户层 (多平台 Bot SDK) |
| 2 | Gateway 层 (消息路由/会话管理) | Core 层 (Trait-based Agent Engine) |
| 3 | pi-mono 层 (pi-ai/pi-agent-core/pi-coding-agent) | Provider 层 (多模型抽象) |
| 4 | 工具层 (Playwright/Sharp/node-pty) | 工具层 (直接系统调用/外部库) |
表二:PicoClaw vs NanoBot
| 层级 | PicoClaw (Go) | NanoBot (Python) |
|---|---|---|
| 1 | 用户层 (单一平台专注) | 用户层 (基础 Bot 集成) |
| 2 | Agent 层 (精简版 Agent 核心) | Agent 层 (简化版循环) |
| 3 | 执行层 (goroutine 并发执行) | 工具层 (官方 SDK + subprocess) |
| 4 | 系统层 (直接系统调用) | - |
4.2 AI Provider 抽象对比
| 版本 | Provider 实现方式 | 扩展性 |
|---|---|---|
| OpenClaw | pi-ai 统一抽象层 | ⭐⭐⭐⭐⭐ |
| ZeroClaw | Trait-based 定义 | ⭐⭐⭐⭐ |
| PicoClaw | 接口定义 | ⭐⭐⭐ |
| NanoBot | 直接调用官方 SDK | ⭐⭐ |
4.3 工具执行对比
| 版本 | 工具实现方式 | 安全性 |
|---|---|---|
| OpenClaw | node-pty 伪终端 | ⭐⭐⭐⭐ |
| ZeroClaw | 直接系统调用 | ⭐⭐⭐⭐⭐ |
| PicoClaw | subprocess 执行 | ⭐⭐⭐⭐ |
| NanoBot | subprocess/官方 SDK | ⭐⭐⭐ |
5. 性能与资源对比
5.1 详细数据表
| 指标 | OpenClaw | ZeroClaw | PicoClaw | NanoBot |
|---|---|---|---|---|
| 语言 | TypeScript | Rust | Go | Python |
| 运行时 | Node.js | 原生二进制 | 原生二进制 | CPython |
| 内存占用 | >1GB | <5MB | <10MB | >100MB |
| 启动时间 | >500s | <10ms | <1s | >30s |
| 二进制大小 | - | 3.4MB | 单文件 | - |
| CPU 占用 | 中等 | 极低 | 低 | 高 |
| 并发模型 | Event Loop | Tokio | Goroutine | GIL |
5.2 性能对比图
markdown
内存占用(对数刻度)
────────────────────────────────────────────────────────
1.5GB │ █
│ █ OpenClaw
1GB │ █
│ █
500MB │ █
│ █
100MB │ ████
│ ████ NanoBot
50MB │ ████
│ ████
10MB │ ███████
│ ███████ PicoClaw
5MB │ ███████
│ ███████ ZeroClaw
1MB │ ███████
└────────────────5.3 启动时间对比(对数刻度)
markdown
启动时间
────────────────────────────────────────────────────────
500s │ █
│ █ OpenClaw
100s │ █
│ █
30s │ ███
│ ███ NanoBot
10s │ ███
│ ███
1s │ ████
│ ████ PicoClaw
100ms │ ████
│ ████
10ms │ ███████
│ ███████ ZeroClaw
1ms │ ███████
└────────────────6. 适用场景与选型建议
6.1 决策树
scss
需要选择 xxxClaw 版本?
│
├─ 需要最全功能?
│ └─ YES → OpenClaw (TypeScript)
│
├─ 资源极度受限(<100MB 内存)?
│ └─ YES → ZeroClaw (Rust) 或 PicoClaw (Go)
│
├─ 学习 AI Agent 原理?
│ └─ YES → NanoBot (Python)
│
├─ 嵌入式/移动设备?
│ └─ YES → PicoClaw (Go)
│
├─ 追求极致性能?
│ └─ YES → ZeroClaw (Rust)
│
└─ 快速原型验证?
└─ YES → NanoBot (Python) 或 OpenClaw (TS)6.2 场景选型表
| 场景 | 推荐版本 | 原因 |
|---|---|---|
| 个人桌面使用 | OpenClaw | 功能全,生态成熟 |
| 低配 VPS | ZeroClaw | 资源占用极低 |
| Raspberry Pi | ZeroClaw/PicoClaw | ARM 支持 |
| 学习研究 | NanoBot | 代码清晰易懂 |
| 生产部署 | ZeroClaw/OpenClaw | 稳定可靠 |
| 快速原型 | NanoBot | 开发效率高 |
| 嵌入式设备 | PicoClaw | 单文件部署 |
| 移动/Termux | PicoClaw/ZeroClaw | 跨平台编译 |
| 企业级 | OpenClaw/ZeroClaw | 完善支持 |
| 性能敏感 | ZeroClaw | 极致性能 |
6.3 技术栈偏好选型
| 技术背景 | 推荐版本 | 原因 |
|---|---|---|
| 前端/Node.js 开发者 | OpenClaw | 技术栈熟悉 |
| 后端/系统开发者 | ZeroClaw | 性能和可控性 |
| Go 开发者 | PicoClaw | 技术栈一致 |
| 数据科学/Python 开发者 | NanoBot | 语言熟悉 |
| 嵌入式开发者 | PicoClaw/ZeroClaw | 跨平台编译 |
7. 发展趋势
7.1 当前趋势
发展趋势
- 从"大而全"到"小而美",OpenClaw → ZeroClaw/PicoClaw
- 从"云端"到"边缘/本地",云端 AI → 本地部署 → 嵌入式运行
- 从"单一实现"到"多语言生态",TypeScript → Rust/Go/Python/C/C++
- 从"通用"到"专用",通用 Agent → 嵌入式/高性能/学习版
7.2 未来展望
| 方向 | 可能的发展 |
|---|---|
| 性能优化 | 更多 Rust/C++ 实现 |
| 跨平台 | WebAssembly 版本 |
| 模块化 | 插件系统标准化 |
| 标准化 | Agent 协议统一 |
| 边缘计算 | 更轻量级版本 |
8. 总结
8.1 关键要点
xxxClaw 版本选型要点:
1️⃣ 功能 vs 性能
- 要功能全 → OpenClaw
- 要性能好 → ZeroClaw
2️⃣ 开发效率 vs 运行效率
- 快速开发 → Python/TypeScript
- 运行效率 → Rust/Go/C++
3️⃣ 部署环境
- 桌面/服务器 → OpenClaw/ZeroClaw
- 嵌入式/移动 → PicoClaw/ZeroClaw
- 学习/原型 → NanoBot
4️⃣ 团队技术栈
- 选择团队熟悉的语言
- 降低维护成本
8.2 各版本一句话总结
| 版本 | 一句话总结 |
|---|---|
| OpenClaw | 功能最全的原版,适合日常使用和开发 |
| ZeroClaw | 极致性能的 Rust 版,适合资源受限环境 |
| PicoClaw | 嵌入式友好的 Go 版,单文件部署 |
| NanoBot | 简洁的 Python 学习版,代码清晰易懂 |
| QuantClaw | C++ 高性能复刻,适合性能敏感场景 |
| MimiClaw | 极简 C 实现,适合极致资源受限环境 |
8.3 如何开始?
学习路径建议:
- 第一步:了解架构
- 阅读《OpenClaw 架构解析》
- 第二步:对比选型
- 阅读本文,确定适合自己的版本
- 第三步:动手实践
- 试用 OpenClaw(体验完整功能)
- 阅读 NanoBot 源码(学习原理)
- 尝试 ZeroClaw(体验性能)
- 第四步:深入开发
- 基于选定版本进行定制开发
参考资料
作者注: 本文基于 2026 年 2 月的最新信息编写,如有与官方仓库差距,请以 GitHub 最新信息为准。
最后更新: 2026-02-28
文章使用了 GLM 5.0 润色
版权声明:
本文版权属于作者 林小帅,未经授权不得转载及二次修改。
转载或合作请在下方留言及联系方式。