Pytorch 快速入门保姆级教程(三)
2026.03 | ming

七. 数据加载与处理
我们都知道,深度学习的应用无处不在------图片识别、语音转文字、视频生成、文本分类,而支撑这些应用的核心,就是海量的训练数据。不同任务的数据集千差万别,图片是像素矩阵、文本是字符序列、语音是波形数据,那PyTorch到底怎么读取这些五花八门的数据呢?
你可能会想,PyTorch是不是给每种数据都写好了现成的读取函数?其实不然------因为每个人的数据集结构、模型需求都不一样,没有万能的读取工具。但是它给了我们一个"万能框架",只要学会这一套,不管什么类型的数据,都能轻松加载、处理,这套框架就是 Dataset + DataLoader。
可以把数据集想象成一个"仓库",里面堆满了各种"货物"(样本数据),每个货物都贴了"标签"(数据标签)。
- Dataset 就相当于仓库的"整理员":负责把仓库里的货物整理好,记录清楚有多少件货物(样本数量),并且能根据编号(索引)快速找到对应的货物和标签。
- DataLoader 就相当于仓库的"搬运工":负责把整理好的货物,一批一批搬到车间(模型)里,还能根据需求打乱货物顺序、多个人一起搬运(多进程加速)。
7.1 DataSet
Dataset 不是一个可以直接使用的工具,而是一个抽象基类 (或者说"模板")。因为每个任务的数据集格式千差万别(有的存在文件夹里,有的存在数据库里,有的是一堆路径列表),所以我们不能指望 PyTorch 提供一个万能的加载器。正确的做法是:按照这个模板,自己定义一个专属的数据集整理员 ------也就是自定义一个继承自 Dataset 的类。
Dataset 的本质,就是存储样本及其对应的标签,提供"查询"功能。比如你问它"仓库里有多少件货物",它能快速回答;你说"给我第5件货物",它能快速找到对应的货物和标签。
光说可能有点抽象,我们用代码来直观感受一下。
最简单的自定义 Dataset
python
from torch.utils.data import Dataset # 导入 PyTorch 自带的 Dataset 模板
# 自定义 Dataset 类,必须继承 Dataset
class MyDataset(Dataset):
def __init__(self, data, labels):
"""
初始化方法:把数据和标签保存起来
data: 所有样本
labels: 所有样本对应的标签(与 data 一一对应)
"""
self.data = data
self.labels = labels
def __len__(self):
"""返回样本总数(管理员清点货物数量)"""
return len(self.data)
def __getitem__(self, idx):
"""
根据索引 idx 返回一个样本及其标签(管理员按编号取货)
idx: 样本索引(从 0 开始)
"""
sample = self.data[idx] # 获取样本
label = self.labels[idx] # 获取对应标签
return sample, label上面我们定义了一个最简单的数据集类。现在来试试用它封装我们的数据:
python
# 假设我们有 5 个样本,每个样本是 4 维特征
mydata = torch.tensor([[4.3, 1.3, 1.3, 2.0],
[5.1, 3.3, 4.9, 2.1],
[5.0, 2.0, 3.5, 1.6],
[5.9, 3.0, 5.1, 1.8],
[6.3, 3.4, 5.6, 2.4]])
# 对应的标签(0 或 1)
mylabel = torch.tensor([0, 1, 0, 1, 1])
# 创建 MyDataset 实例
dataset = MyDataset(mydata, mylabel)
# 现在 dataset 就是一个标准的 PyTorch 数据集,可以通过索引访问
print(dataset[2])
# 输出: (tensor([5.0000, 2.0000, 3.5000, 1.6000]), tensor(0))输出是一个元组,第一个元素是样本,第二个元素是标签。这正是 PyTorch 期望的格式,后续的 DataLoader 会直接使用这个格式。
在自定义DataSet类的时候,我们必须要实现 __len__ 和 __getitem__这两个方法,这是 PyTorch 的硬性规定:
__len__:返回数据集大小。PyTorch 的DataLoader在迭代时需要知道一共有多少个样本,才能决定如何分批、是否打乱等。__getitem__:支持索引操作。并且return的格式永远是样本,标签,DataLoader会通过这个方法来获取每一个样本。
只要你有这两个方法,其它的随你怎么自定义都行。
看来上面的例子,你可能会觉得,多套一个Dataset的壳,有必要吗?明明直接读取mylabel和mydata不是更好更方便吗。你先不要着急,我们再来看一个例子,自定义图片分类数据集,相信你在看完下面这个例子就彻底了解了DataSet类存在的意义。
假设我们有一个猫狗分类的图片数据集,文件结构如下:
bash
dataset/
├─ cat/ # 猫的图片,标签设为0
│ ├─ cat1.jpg
│ ├─ cat2.jpg
│ └─ ...
└─ dog/ # 狗的图片,标签设为1
├─ dog1.jpg
├─ dog2.jpg
└─ ...如果直接用列表存图片,会面临两个问题:
- 内存爆炸:如果一次性把所有图片读进内存(比如 10 万张),电脑很可能内存不足。
- 预处理复杂:图片需要统一大小、转换成张量、做数据增强等,这些操作最好在取样本时动态进行。
自定义 Dataset 完美解决了这些问题。下面我们实现一个针对这种文件夹结构的 Dataset :
python
import os
from torchvision.io import read_image
from torch.utils.data import Dataset
class CatDogDataset(Dataset):
"""猫狗分类数据集,假设图片存放在 dataset/cat/ 和 dataset/dog/ 下"""
def __init__(self, root_dir, transform=None):
"""
root_dir: 数据集根目录,例如 './dataset'
transform: 预处理函数(第八章会详细讲解,先不用管)
"""
self.root_dir = root_dir
self.transform = transform
self.samples = [] # 存放 (图片路径, 标签) 的列表
# 遍历 cat 和 dog 两个子文件夹,将每一张图片的具体地址存放进self.samples中
for label, class_name in enumerate(['cat', 'dog']):
class_dir = os.path.join(root_dir, class_name)
for file_name in os.listdir(class_dir):
if file_name.lower().endswith(('.jpg', '.jpeg', '.png')):
path = os.path.join(class_dir, file_name)
self.samples.append((path, label))
def __len__(self):
# 返回此数据集包含的样本总数
return len(self.samples)
def __getitem__(self, idx):
path, label = self.samples[idx] # 取出第idx个图片的路径和标签
image = read_image(path) # 读取路径path的图片
if self.transform:
image = self.transform(image) # 进行预处理(如缩放、转张量)
return image, label这样,我们只需要把数据集的根目录传入CatDogDataset类就完成了数据集的创建
python
mydataset = CatDogDataset("./dataset")并且,你可以注意到:
__init__中只存路径 :在初始化的时候,我们并没有把图片读入内存,而是把每个样本的"图片路径"和"标签"存为一个元组,放在self.samples列表里。这样即使有几十万张图片,内存占用也极小。__getitem__中动态读取 :当外部代码(如DataLoader)通过索引索取某个样本时,我们才真正去磁盘读取图片,并实时进行预处理。这叫做惰性加载,是处理大数据集的标配。- 注意,此时我们的所有训练数据都是存储在CPU的内存中的,而非GPU的显存中。并且也不能在DataSet中就把数据读取到GPU显存中,这样的话训练速度会非常慢,通常是在训练循环中批量的将数据送往显存中的。
通过这个例子,相信你已经明白了 Dataset 的价值:它把"数据在哪里"和"怎么取数据"封装起来,后面的章节你可以看到Dataset类能让上层代码(如 DataLoader)可以统一、高效地访问任意形式的数据集,同时避免了内存爆炸和预处理混乱的问题。
7.2 DataLoader
上一节我们学会了用 Dataset 像查字典一样按索引取出单个样本。但在实际训练神经网络时,我们绝不会一个一个地喂数据------那样太慢了,就像用勺子一勺勺地给大象喂水。正确的做法是一次性喂一批数据(批处理),让模型并行处理,这既能利用 GPU 的并行计算能力,又能让梯度估计更稳定。
DataLoader 就是负责完成这个"批量配送"任务的工具。它把我们定义好的 Dataset 当作"原料仓库",然后按照我们的要求,将原料打包、打乱、加速搬运到模型里。
DataLoader 主要帮你做了三件事:
- 自动分批(Batching) 每次从数据集中取出固定数量的样本,形成一个"批次"(batch)。这个数量由参数
batch_size控制。比如设置batch_size=32,DataLoader就会每次返回 32 个样本(及其标签)。 - 数据打乱(Shuffling) 在每个 epoch(遍历完一遍所有数据)开始前,
DataLoader会把数据集中的顺序随机打乱。这能避免模型学习到样本顺序带来的假规律,提升泛化能力。 - 多进程加速(Multiprocessing) 数据读取往往是训练中的 I/O 瓶颈。
DataLoader可以开启多个子进程并行加载数据,让数据源源不断地送到 GPU 面前,避免模型"等数据吃饭"。
沿用上一节的 MyDataset,我们先创建一些模拟数据,然后把它交给 DataLoader。
python
import torch
from torch.utils.data import Dataset, DataLoader
# 1. 定义自己的 Dataset(和上节一样)
class MyDataset(Dataset):
def __init__(self, data, labels):
self.data = data # 特征矩阵
self.labels = labels # 标签向量
def __len__(self):
return len(self.data)
def __getitem__(self, idx):
return self.data[idx], self.labels[idx]
# 2. 生成模拟数据:200个样本,每个样本4个特征,标签二分类(0/1)
data = torch.randn(200, 4) # 200x4 的随机特征
labels = torch.randint(0, 2, (200,)) # 200个随机标签
# 3. 实例化 Dataset
dataset = MyDataset(data, labels)
python
# 4. 创建 DataLoader ------ 重点来了!
dataloader = DataLoader(
dataset, # 传入 Dataset 实例
batch_size=5, # 每批取5个样本(根据显存调整)
shuffle=True, # 每个 epoch 打乱数据(训练集通常True)
num_workers=4, # 用4个子进程加载数据(根据CPU核心数调整)
drop_last=True, # 丢弃最后不足 batch_size 的批次
pin_memory=True # 加速 CPU→GPU 传输(如果你有GPU,建议True)
)参数说明
batch_size:越大,梯度越稳定,但显存占用也越大。常用值:16, 32, 64, 128。shuffle:训练集一般设为True,测试集设为False。num_workers:在 Linux/Mac 上可以设为 CPU 核心数(如 4, 8),但在 Windows 上需要小心(见后面的"注意事项")。drop_last:如果数据集大小不能被batch_size整除,最后一个批次样本数会少一些。设置drop_last=True就会丢弃这最后一批,让所有批次大小一致(有些模型要求固定输入维度)。pin_memory:如果使用 GPU,设为True可以将数据放在锁页内存中,使 CPU→GPU 传输更快。
DataLoader 本质是一个可迭代对象 ,我们可以直接用 for 循环遍历它,每次得到一个批次的数据和标签:
python
for batch_data, batch_labels in dataloader:
print("数据形状:", batch_data.shape)
print("标签形状:", batch_labels.shape)
print("数据内容:\n", batch_data)
print("标签内容:", batch_labels)
# 这里就可以把 batch_data, batch_labels 送入模型进行前向、反向传播了
break # 只查看第一个批次
python
# 输出示例(每次运行可能不同,因为 shuffle=True):
数据形状: torch.Size([5, 4])
标签形状: torch.Size([5])
数据内容:
tensor([[ 0.9124, 0.4168, 0.7011, 0.1032],
[ 0.9567, -0.0275, 0.2400, 0.2573],
[ 0.7671, 0.6073, 0.8117, 0.4210],
[ 0.6642, 0.9855, -0.6126, 0.3464],
[ 0.9293, 0.0757, 0.1477, 0.5342]])
标签内容: tensor([0, 0, 0, 1, 1])可以看到,DataLoader 自动帮我们把散装的样本打包成了整齐的批次,并且顺序是随机的。
⚠️注意:如果你在 Windows 系统上运行上面的代码,并且 num_workers > 0,很可能会遇到这样的报错:
css
RuntimeError: DataLoader worker (pid(s) ...) exited unexpectedly这是因为 Windows 没有 fork() 系统调用,它启动多进程的方式与 Linux/Mac 不同。要解决这个问题,有两种常见做法:
-
直接设 num_workers=0 把
num_workers设为 0,让数据加载在主进程中进行。虽然速度慢一点,但绝对不会报错,适合快速验证代码。 -
规范做法:将 DataLoader 相关代码放入
if __name__ == '__main__':保护块 Windows 要求多进程代码必须放在该保护块内,否则会无限递归创建子进程。修改后的代码结构如下:pythonif __name__ == '__main__': dataset = MyDataset(data, labels) dataloader = DataLoader(dataset, batch_size=128, shuffle=True, num_workers=4, ...) for batch_data, batch_labels in dataloader: # 训练代码 ...这样既能享受多进程加速,又不会在 Windows 下报错。这是推荐的正式写法。
7.3 划分数据集
在深度学习训练中,我们经常需要把数据集分成训练集和测试集。PyTorch 提供了一个非常方便的工具 random_split,可以帮我们一键划分,不用自己手写切片逻辑。
torch.utils.data.random_split 的作用是:随机地将一个 Dataset 分割成若干个子集。它只需要两个参数:
dataset:要划分的数据集对象。lengths:一个列表,指定每个子集的样本数量(或比例)。
它会返回一个元组,里面是多个 Dataset 对象,可以直接喂给 DataLoader。
下面我们沿用上一节的 dataset(包含 200 个样本),按 8:2 的比例划分成训练集和验证集
python
from torch.utils.data import random_split
# 假设我们已经创建好了 dataset(包含200个样本)
# 计算训练集和验证集的大小
train_size = int(0.8 * len(dataset)) # 80%样本用于训练
val_size = len(dataset) - train_size # 剩下的样本用于验证
# 随机划分数据集
train_set, val_set = random_split(dataset, [train_size, val_size])
print(f"训练集样本数: {len(train_set)}") # 160
print(f"验证集样本数: {len(val_set)}") # 40注意:
random_split不会复制数据,它只是记录原始数据集的索引。所以无论怎么划分,都不会额外占用内存。- 划分是随机 的,每次运行结果可能不同。如果希望结果可重复,可以在划分前设置随机种子:
torch.manual_seed(42)。
划分好之后,我们就可以分别为训练集和验证集创建 DataLoader 了。
python
from torch.utils.data import DataLoader
# 训练集 DataLoader:需要打乱数据,让每个 epoch 顺序不同
train_loader = DataLoader(train_set, batch_size=64, shuffle=True, num_workers=0)
# 验证集 DataLoader:不需要打乱,按顺序评估即可
val_loader = DataLoader(val_set, batch_size=64, shuffle=False, num_workers=0)八. 常用图像处理
在上一章的内容里,我们简单接触了图像读取函数 read_image 和基础的图像变换工具Transform ,只是浅尝辄止地用了一下。而在深度学习的视觉任务中(比如图像分类、目标检测),图像处理是绕不开的核心环节。现实中的数据往往不是"拿来就能用"的------图片有大有小,颜色有深有浅,甚至同一张图翻转一下就能变成一张"新图"。为了让模型学得更好、更鲁棒,我们通常会在训练前对图像做一系列预处理 和数据增强。
打个比方:你给模型看一张猫的照片,如果只给它看同一个角度、同一光线的猫,模型可能会把"那个角度"当成猫的特征,换一个角度就不认识了。但如果你在训练时,把猫的照片随机旋转、裁剪、调色,模型就会逐渐明白:猫就是猫,不管它是躺着还是站着,不管是白天拍的还是晚上拍的,它都是猫。这就是数据增强的作用------用有限的图片,通过变换创造出无限多样的训练样本,让模型学到更本质的特征,从而提升泛化能力。
本章我们就来系统学习 PyTorch 中图像处理的常用工具:torchvision.io (读取图像)和 torchvision.transforms.v2(图像变换)。掌握它们,你就能轻松地对图像进行各种"PS"操作,为模型准备高质量的训练数据。
8.1 图像读取
处理图像的第一步,当然是把图片读进来 。torchvision.io 提供了 read_image 函数,可以直接将图片文件读取为 PyTorch 的 Tensor 格式,非常方便。
python
from torchvision.io import read_image
# 读取一张图片(自动转为 Tensor,形状为 [C, H, W])
image_tensor = read_image("../media/icon48.png")
print("原始图像形状:", image_tensor.shape) # 输出示例:torch.Size([4, 48, 48])这里返回的 Tensor 形状是 [C, H, W],即通道数 × 高度 × 宽度。如果你的图片是 PNG 格式 ,通常会有 4 个通道:R(红)、G(绿)、B(蓝)和 A(透明度)。而常见的 JPG 图片只有 RGB 三个通道,没有透明度通道。
必要时也可以切片取出前三个通道(例如 image_tensor[:3])来丢掉 Alpha 通道,因为很多模型只接受三通道输入。
💡 小提示 :
read_image返回的 Tensor 数值范围是 0, 255 的整数(数据类型为torch.uint8)。如果你需要浮点数(例如用于归一化),后续可以用变换将它转为float32。
8.2 图像变换
图像变换方法非常多,要使用这些变换,首先要导入:
python
from torchvision.transforms import v2
v2是 torchvision 0.15+ 引入的新一代变换 API,它与旧版兼容,但功能更强大,支持 tensor 图像直接操作,且能更好地与 GPU 配合。
为了方便查阅,我把最常用的变换整理成一个速查表(你可以在写代码时随时参考)。
| 变换类型 | 代码示例 | 说明 |
|---|---|---|
| 调整大小 | v2.Resize(256, antialias=True) |
将图像的短边缩放到 256 像素,长边按比例缩放;antialias=True 可防止缩放时出现锯齿。 |
| 中心裁剪 | v2.CenterCrop(224) |
从图像中心裁剪出 224×224 的正方形区域。 |
| 随机裁剪 | v2.RandomCrop(128) |
在图像上随机位置裁剪 128×128 区域,是常用的数据增强手段。 |
| 水平翻转 | v2.RandomHorizontalFlip(p=0.5) |
以 50% 的概率水平翻转图像(左右镜像)。 |
| 垂直翻转 | v2.RandomVerticalFlip(p=0.2) |
以 20% 的概率垂直翻转图像(上下颠倒)。 |
| 颜色抖动✨ | v2.ColorJitter(brightness=0.2, contrast=0.3, saturation=0.4, hue=0.1) |
随机调整亮度(±20%)、对比度(±30%)、饱和度(±40%)、色相(±0.1)。 |
| 随机旋转 | v2.RandomRotation(30) |
在 -30°, 30° 范围内随机旋转图像。 |
| 随机灰度化 | v2.RandomGrayscale(p=0.1) |
以 10% 的概率将图像转为灰度图(常用于减少对颜色的依赖)。 |
| 标准化 | v2.Normalize(mean=[0.485, 0.456, 0.406], std=[0.229, 0.224, 0.225]) |
对图像每个通道减去均值再除以标准差,使数据分布接近标准正态。这些数字是 ImageNet 数据集的统计值,使用预训练模型时不可随意改动! |
| 类型转换+归一化 | v2.ToDtype(torch.float32, scale=True) |
将图像转为 float32 类型,并将像素值从 0, 255 缩放到 0, 1。 |
| 高斯模糊 | v2.GaussianBlur(kernel_size=3, sigma=(0.1, 2.0)) |
对图像进行高斯模糊,sigma 可以在给定范围内随机选择(增强模型对模糊的鲁棒性)。 |
| 转为单通道灰度 | v2.Grayscale(num_output_channels=1) |
将 RGB 三通道图像转为单通道灰度图。 |
关于"概率"的说明 :上表中带有 p 参数的变换(如翻转、灰度化),表示每次应用时只有 p 的概率真正执行该变换,否则原样返回。
那么如何使用这些变换呢?非常简单,你想用什么变换,就将这些变换填到如下的数组中即可:
python
# 1. 读取图片(4通道 PNG)
img = read_image("example1.png") # shape: [4, H, W]
print("原始形状:", img.shape)
# 2. 丢弃 Alpha 通道,只保留 RGB(很多变换不支持4通道)
img_rgb = img[:3] # shape: [3, H, W]
# 3. 定义变换流水线
transform = v2.Compose([
... # 在这里依次写下你想做的变换
])
# 4. 应用变换(可以多次应用,看到不同的随机效果)
transformed_img = transform(img_rgb)v2.Compose 就是一个预处理流水线,它接受一个变换列表,然后按顺序依次应用。
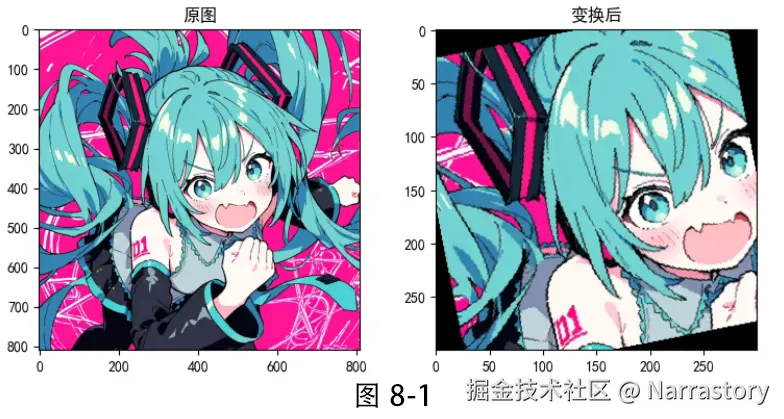
下面来举几个例子,假设我们有一张 1080×1080 的正方形图片(example1.png),执行下面的变换:
python
transform = v2.Compose(
[
v2.Resize(512, antialias=True), # 短边缩放到 512
v2.RandomCrop(300), # 随机裁剪 300x300
v2.RandomRotation(30), # 随机旋转-30°~30°
]
)结果图片(图 8-1)是一张旋转过且只包含原图局部区域的图片,每次运行结果可能不同。
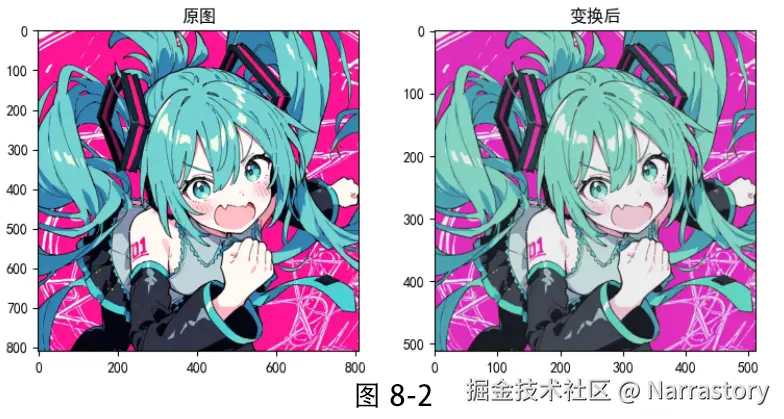
示例2:颜色抖动
python
transform2 = v2.Compose([
v2.Resize(512, antialias=True),
v2.ColorJitter(
brightness=0.2, # 亮度变化 ±20%
contrast=0.3, # 对比度变化 ±30%
saturation=0.4, # 饱和度变化 ±40%
hue=0.1 # 色相变化 ±0.1(范围一般是 [-0.5, 0.5])
),
])✨ 为什么叫"抖动"? 你可以理解为:每次应用这个变换时,都会在参数范围内随机选取一个值,就像给颜色加了一个随机"抖动",让图片看起来像是换了滤镜。
结果图片(图 8-2)保持内容不变,但整体色调、亮度、对比度会发生随机的、柔和的变化。
在训练任何深度学习模型(尤其是使用预训练模型)时,我们通常需要将图像转换为模型期望的格式。标准流程如下:
python
transform_standard = v2.Compose([
# 数据增强部分(可选,仅训练时使用)
# v2.RandomHorizontalFlip(p=0.5),
# v2.RandomRotation(10),
# 必备部分
v2.ToDtype(torch.float32, scale=True), # 转为 float32 并归一化到 [0,1]
v2.Normalize(
mean=[0.485, 0.456, 0.406], # ImageNet 均值
std=[0.229, 0.224, 0.225], # ImageNet 标准差
),
])为什么最后两步是必须的?
ToDtype(scale=True)将像素值从 0,255 缩放到 0,1,这是大多数神经网络输入层的期望范围。Normalize将数据标准化为均值为 0、标准差为 1 的分布,可以加速模型收敛,且是预训练模型的硬性要求(因为预训练权重就是在这样的标准化数据上训练得到的)。
除了基础变换,v2 还提供了一些更有趣的增强方法,这里简单介绍两个,感兴趣的同学可以自行查阅文档。
随机擦除 随机选择一个矩形区域,用随机值或固定值填充,模拟物体被遮挡的情况,强迫模型关注其他区域。
python
# 原图上出现一块黑色遮挡
v2.RandomErasing(p=0.5, scale=(0.02, 0.33), ratio=(0.3, 3.3), value=0)透视变换 模拟从不同视角观察物体,产生"近大远小"的畸变效果。
python
# 图像像被倾斜拉伸
v2.RandomPerspective(distortion_scale=0.5, p=0.5)到这里你应该就理解了什么是图像变换transform,那么如何在模型训练的时候使用这些变换呢?其实你已经知道了,你可以回到 7.1 小节再看看CatDogDataset的代码,相信你就会恍然大悟。