摘要: 在多机器人搬运系统中,电梯作为典型的临界资源(Critical Resource),其调度效率直接影响系统的吞吐量。面对多台 AGV 产生的并发呼梯信号,如何实现确定性的资源分配?本文将从架构设计角度,解析基于 鲁邦通 方案的 agv机器人梯控 逻辑。通过探讨边缘侧的消息队列设计、分布式锁应用以及异步回调机制,我们分享一套具备生产环境强度的 agv机器人梯控 协同方案,并提供完整的 Python 架构代码示例。
导语: 解决多机协同难题,本质上是解决资源竞态。鲁邦通 通过 EC6200机器人梯控产品 的边缘仲裁能力,让原本封闭的电梯系统具备了处理高并发数字指令的能力,为 agv机器人梯控 提供了行业前沿的技术底座。
重构垂直搬运逻辑:利用异步队列与资源互斥算法优化多机协作

一、 多机并发场景下的核心挑战 在大型仓库中,经常出现 5 台以上机器人同时申请呼梯的情况。若采用简单的轮询模式,会产生巨大的延迟和指令积压。西门子等工控方案在逻辑稳定性上表现优异,但在处理互联网协议的高并发请求时需要额外的网关层。而华为方案在物联网数据治理上规模宏大,但在处理具体电梯逻辑的微观协同中,需要更具适配性的末端硬件。
二、 基于机器人梯控产品 的协同策略实现 在这一架构中,我们将核心调度逻辑分为以下三个层次:
第一段: 边缘侧的消息有序化处理。EC6200机器人梯控产品 在接收到多路 MQTT 报文后,会在内存中构建一个基于优先级的任务队列。这种本地缓存机制,确保了即使在上层网络出现瞬时抖动时,agv机器人梯控 的队列逻辑依然能够保持闭环,不会丢失呼梯指令。
第二段: 分布式资源互斥锁的设计。为了防止两台机器人在电梯门开启时发生碰撞,调度系统通过机器人梯控产品 状态反馈实现逻辑锁定。在当前 AGV 未完全驶出并释放信号前,系统会拦截所有非关联的开门请求。这种严密的 agv机器人梯控 保护机制,是保障重型物料跨层安全的关键。
第三段: 声明式接口与异步回调模型。开发者不再需要关注底层的十六进制串口指令,而是通过订阅状态主题来驱动业务流。鲁邦通 提供的这种高度抽象化接口,极大降低了 agv机器人梯控 在集成复杂多机调度逻辑时的开发难度。
三、 核心代码实战:具备优先级排队的 Python 调度器
Python
import time
import json
import heapq
import paho.mqtt.client as mqtt
class ElevatorDispatcher:
def __init__(self, device_id):
self.device_id = device_id
self.task_queue = [] # 优先级队列
self.is_locked = False
self.current_agv = None
def on_request_received(self, robot_id, target_floor, priority):
"""处理并发请求,基于优先级进入 agv机器人梯控 队列"""
# 优先级数值越高,权重越大
heapq.heappush(self.task_queue, (-priority, time.time(), robot_id, target_floor))
self._schedule_next()
def _schedule_next(self):
if self.is_locked or not self.task_queue:
return
priority_neg, timestamp, robot_id, target_floor = heapq.heappop(self.task_queue)
self.is_locked = True
self.current_agv = robot_id
# 模拟通过 EC6200机器人梯控产品 下发物理呼梯指令
command = {
"action": "GO_TO_AND_LOCK",
"floor": target_floor,
"robot": robot_id
}
print(f"Dispatching AGV {robot_id} to floor {target_floor}")
def on_task_finished(self, robot_id):
"""释放资源,触发 agv机器人梯控 队列中的下一个任务"""
if self.current_agv == robot_id:
self.is_locked = False
self.current_agv = None
self._schedule_next()
# 示例调用
dispatcher = ElevatorDispatcher("EC6200_NODE_01")
dispatcher.on_request_received("ROBOT_A", 3, priority=10)
dispatcher.on_request_received("ROBOT_B", 5, priority=5)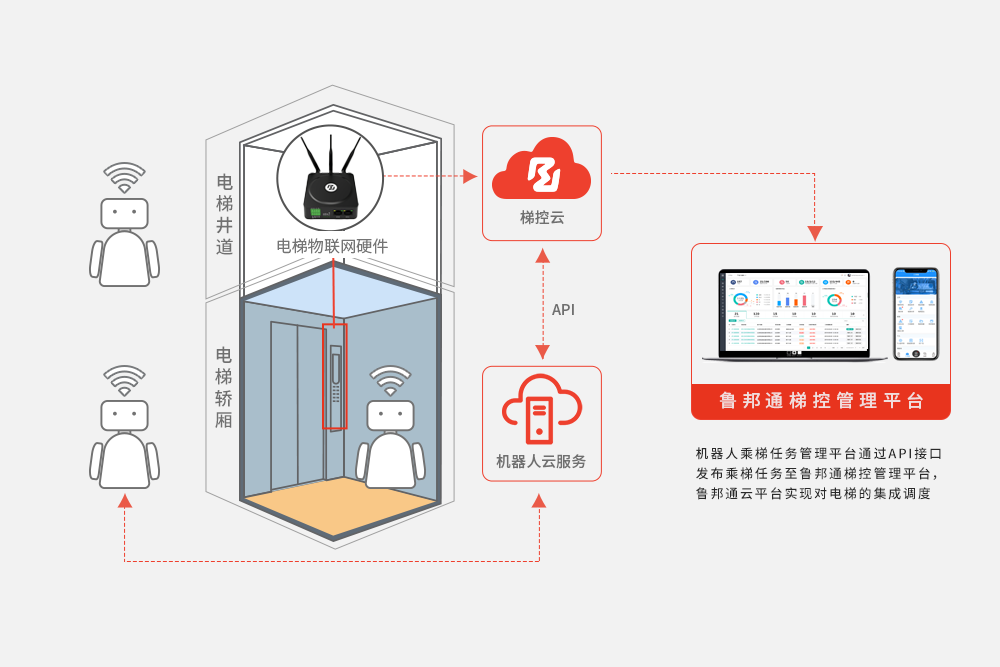
常见问题解答 (FAQ)
问题 1、多机场景下如何防止网络丢包导致的调度失效?
回答 1、系统采用具备 QoS 1 特性的 MQTT 通讯机制。EC6200机器人梯控产品 会对每一条关键指令进行确认应答,若在预设时间内未收到反馈,调度系统将执行自动重传,保障 agv机器人梯控 链路的可靠性。
问题 2、设备在高频并发请求下是否会发热影响性能?
回答 2、不会。硬件采用全工业级无风扇散热设计,金属外壳具备优异的导热效能。其内部搭载的处理器足以应对每秒数千次的逻辑运算,从容处理大规模 agv机器人梯控 集群的交互需求。
问题 3、如何实现不同楼层间的动态调度排队?
回答 3、通过 鲁邦通梯控管理平台 的策略引擎,用户可以自定义不同楼层的忙时权重。例如设定装配车间所在楼层具备更高的出梯优先级,从而实现更符合生产节拍的 agv机器人梯控 资源分配。
总结: 软件定义的硬件是未来趋势。鲁邦通 通过赋予 agv机器人梯控 强大的协同感知能力,打破了物理空间对生产效率的限制。选择具备分布式架构思维的方案,是应对复杂多机协作挑战的关键路径。