快速了解部分
基础信息(英文):
题目: World Action Models are Zero-shot Policies
时间: 2026.02
机构: NVIDIA
3个英文关键词: World Action Models (WAMs), Zero-shot Generalization, Video Diffusion
1句话通俗总结本文干了什么事情
本文提出了一种名为DreamZero的机器人基础模型,通过同时预测视频和动作(世界动作模型),让机器人能像人类一样通过"脑补"画面来规划动作,从而在从未见过的任务和环境中实现零样本泛化。
研究痛点:现有研究不足 / 要解决的具体问题
现有的视觉语言动作模型(VLAs)虽然擅长语义理解,但缺乏对物理世界动态(如几何、动力学)的理解,难以泛化到从未见过的新动作或新环境,且通常需要大量重复的演示数据。
核心方法:关键技术、模型或研究设计(简要)
采用预训练的视频扩散模型作为骨干,构建了一个名为World Action Model (WAM) 的架构。该模型通过联合预测未来的视频帧和机器人动作,利用视频预测作为视觉规划器来指导动作生成。
深入了解部分
作者想要表达什么
作者旨在证明,通过将机器人策略学习转化为联合视频与动作预测问题,可以利用网络规模的视频数据预训练模型,从而获得强大的物理直觉和空间感知能力,解决传统VLAs在物理交互泛化上的瓶颈。
相比前人创新在哪里
范式转变:不同于VLAs仅学习"看到什么做什",WAMs学习"动作如何改变世界"。
数据效率:打破了传统观念,证明可以从多样、非重复的数据中有效学习,无需每个任务的大量重复演示。
跨具身迁移:展示了惊人的跨具身迁移能力,仅需少量人类或其他机器人的视频(无动作标签)即可显著提升新任务性能。
解决方法/算法的通俗解释
DreamZero的工作原理类似于给机器人装了一个"内部模拟器"。当给定指令时,模型首先在内部"脑补"出完成任务的视频画面,然后根据这个脑补的画面反推需要执行的具体动作。
解决方法的具体做法
模型架构:基于14B参数的视频扩散模型Wan2.1,增加了状态和动作编码器/解码器。
训练方式:使用流匹配(Flow Matching)目标,联合去噪视频潜变量和动作潜变量。
推理优化:提出了DreamZero-Flash技术,通过解耦视频和动作的噪声时间表,实现了单步去噪的实时推理(7Hz)。
基于前人的哪些方法
基于预训练的视觉语言模型(VLMs)和视频扩散模型(Video Diffusion Models)的研究基础,特别是利用了Wan2.1-I2V作为视觉骨干,并借鉴了流匹配算法进行训练。
实验设置、数据、评估方式、结论
实验设置:在AgiBot G1(双臂移动 manipulator)和Franka(单臂)机器人上进行预训练和评估。
数据:使用了约500小时的AgiBot异构数据,以及DROID数据集。
评估方式:在未见过的任务(如解鞋带、熨衣服)和未见过的环境中评估任务进度。
结论:DreamZero在零样本泛化上比最先进的VLAs提升了2倍以上;仅需10-20分钟的其他机器人或人类视频数据,性能相对提升超42%。
提到的同类工作
GR00T N1.6, π₀.σ (pi-zero), RT-2, OpenVLA, CosmoPolicy。
和本文相关性最高的3个文献
Bjorck et al., 2025 (GR00T N1.6)
Physical Intelligence, 2025 (π₀.σ)
Team Wan, 2025 (Wan2.1-I2V-14B-480P)
我的
- WA模型。
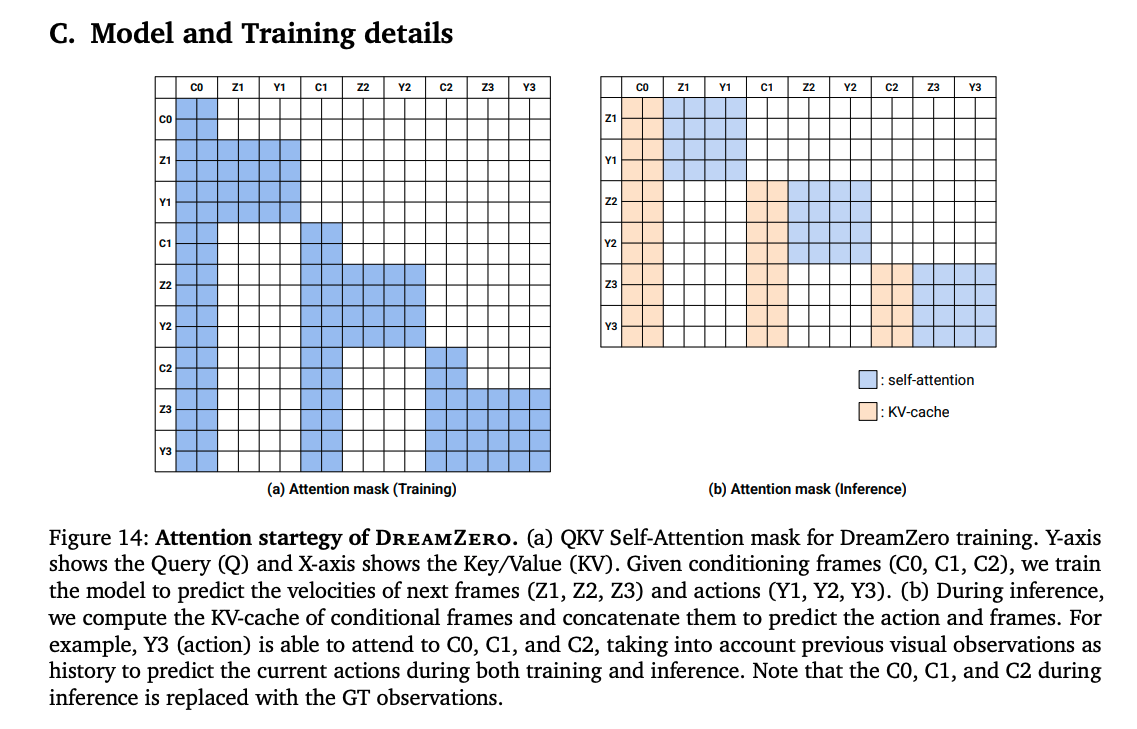
- 有一个把历史frames送入kv cache的操作,然后用的是GT frames。左侧图是对比,右侧是本文。Q是y轴,x轴是KV(记忆),模型在看问题Q时可以参考KV记忆。