《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
一.Bernstein问题
1.问题描述
在控制上肢运动的过程中,人体所要协调控制的上肢自由度至少为7个,其中肩关节3个(a1、a2、a3)、肘关节1个(a4)、腕关节两个(a5、a6)、以及描述前臂在腕关节和肘关节处联合运动的1个,即前臂的旋前运动与旋后运动(a7);而手指所要达到的空间位置在笛卡尔坐标系中可以用一个三维坐标点(X、Y、Z)描述,如图1。这导致控制变量的维度数大于结果变量的维度数(7>3)。如何利用人类运动系统中多个自由度实现特定的运动目标(自由度维度数多于运动目标维度数)?这就是人体运动的Bernstein问题,或多自由度问题(杨宗青,米靖,周松芳好万祥林等人,2023)。现代运动控制之父Bernstein(1967)做过一个著名的实验:在熟练的铁匠打铁时,用照相机记录铁匠上肢各关节和锤子的位置,如图2。相比锤子末端的运动轨迹,他注意到关节的运动学特征(如关节角度或轨迹)在各重复运动之间具有更大的差异。即当重复执行一个动作时,各重复之间的关节特征的差异相对较大,而铁锤运动轨迹的差异相对较小。出现这种现象的原因正是源于Bernstein问题,即不同的关节角度组合可以产生相似的轨迹。
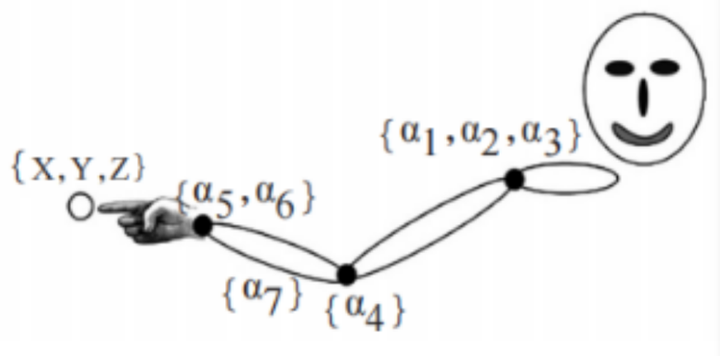
图1
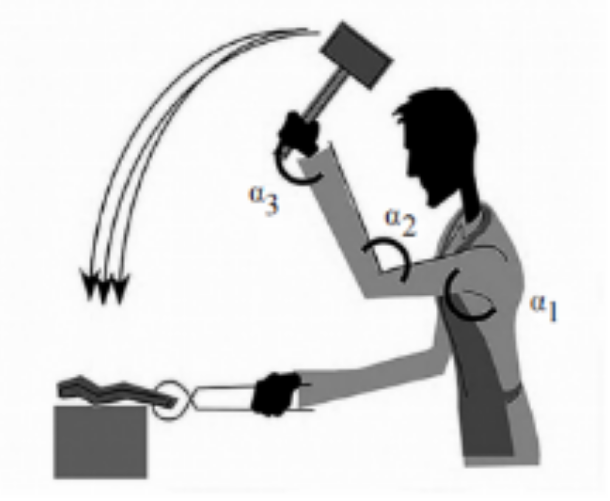
图2
Bernstein问题也可以用线性代数的方法进行描述。在图1中,人体所要协调控制的上肢自由度为7个,手指所要达到的空间位置点维度为3。该问题类似于解算方程组,式中x、y、z假设为食指末端的空间位置坐标,ai假设为描述关节运动的角度,ki为关节角度与食指末端位置的映射关系,即方程的系数,如式1。由于方程的秩大于解的维度,因此方程解有无穷多个。这说明,当自由度维度数多于运动目标维度数时,运动控制的方式可能有无穷种。我们如何从几乎无限可能的组合中选择出相对有限的一组运动方式?这就是Bernstein问题。
式1
2.冗余性和变异性
这种"自由度维度数多于运动目标维度数"的运动控制称为运动的冗余性,无论是人体的单一肢体运动,还是整体运动,其运动控制都极具冗余控制的特征(Hirashima和Oya,2016)。而冗余性又会引起人体运动的变异性,即完成同样的任务时可以采用不同的方式,如铁匠的例子。变异性表明,人在完成重复的动作时并不存在一个严格固定的模式,而是有弹性的。
研究者起初认为运动变异是运动冗余系统在运动过程中产生的"噪声",它会影响任务目标的准确性。随后,有研究认为运动变异是人体运动系统的控制策略(Latash,2012),冗余控制和富余控制两种。冗余控制指将众多元素(如肌肉)组合在一起,并通过一个高级元素同时控制它们。如一个初级运动皮质的神经元可以控制一个关节的多个肌肉,从而缓解运动冗余问题(通过这个方法减少自由度)。这是随后发展出来的"肌肉协同理论"的理论基础;富余控制是指,通过纳入更多的自变量以使得系统更具弹性,即使有外界干扰的情况下,仍然能保持动作结果的稳定性、适应性和灵活性。即冗余性是保持动作稳定的必要条件(如这一自由度组合受到干扰或阻碍不可用,可以使用另一自由度组合,以保证动作的顺利进行)。这一假说是非受控流形假说(或称之UCM协同)的基础(杨宗青,米靖,周松芳好万祥林等人,2023)。最后,从技能学习的过程看,运动变异被认为是一种"有目的的探索过程"(Davids,Bennett和Newell,2005)。
二.肌肉协同理论
1.理论描述
人类是一个相当复杂的系统,运动时大脑必须处理一个由大约107个神经纤维、600块肌肉和200个关节等组成的神经肌肉骨骼系统(杨毅,彭玉鑫,郝增明和刘宇等人,2020)。这存在两个问题,一个是控制变量的维度数远远大于结果变量的维度数,即Bernstein问题;另一个就是在运动的过程中,中枢神经显然不可能时刻对每个肌肉或每个关节进行单独控制。因此,Bernstein(1967)首次提出一种模块化控制理论,即肌肉协同理论。该理论认为,为了解决运动控制的冗余性和变异性问题,在运动过程中大脑不是单独控制每一个肌肉收缩,而是控制一组具有不同权重的肌肉的同时激活(简单点说就是控制一个肌肉组合,这个组合中不同肌肉具有不同权重),由此可以减少因冗余控制问题带来的计算成本。
具体的说,肌肉协同可以分为两个层次,第一层是肌肉协同结构矩阵Wx×s,X代表肌肉数量,S代表协同模块数量。这个矩阵以权重常数的形式存储在脊髓层;第二层是肌肉激活系数矩阵HS×T,T代表时间,或时间上的抽样点,HS×T根据运动需求随时间变化而变化,从而对运动进行调节。各肌肉协同结构(矩阵)与各肌肉激活系数(矩阵)进行线性组合可得各肌肉激活度(矩阵)VX×T,并产生一系列的肢体运动(换句话说,即通过对存储在脊髓层的协同结构矩阵输入控制信号"肌肉激活系数矩阵",就能产生运动)。如公式所示,其中,E为误差项。对于每个矩阵的元素,Vi(t)为第i条肌肉在时间t的激活度,Wis为第i条肌肉在第s个肌肉协同结构中的权重,Hs(t)为第s个肌肉协同模块在时间t上的激活系数。其中,i=1、2、...、X,而t=1、2、...、T(通过采样将时间离散化),s=1、2、...、S。它们之间的运动计算可直观地展示如图2。另外,由于S小于X,且中枢神经通过控制H来控制W,从而达到降维或去冗余的目的(图中S为3,X为5)。(Alessandro,Delis,Nori和Panzeri等人,2013)
在实际中,VX×T可以通过表面肌电信号(sEMG)测量所得,在设置好特定的协同模块数后,可以通过矩阵分解获得Wx×s和HS×T,如式2。
式2
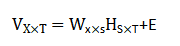
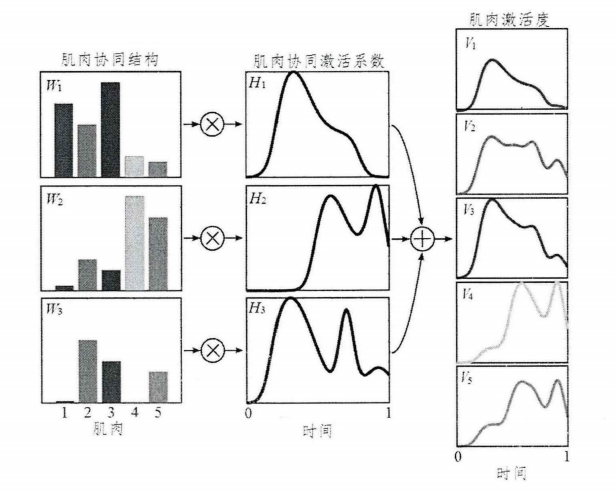
图3
2.一个膝关节协同的例子(郭苒,2021)
伸展和屈曲运动是膝关节最主要的运动方式,如图4所示。膝关节屈曲时,股四头肌是最主要的屈膝肌群。其中股直肌通过收缩将髌骨抬高并向前移动,同时引起膝关节的屈曲。后侧肌群,包括半腱肌、半膜肌和股头肌,协同收缩将胫骨向后拉动,参与膝关节的屈曲动作,为关节提供后方支持。同时,腓肠肌在足尖向上抬升时起到作用,而胫骨前肌在足尖向下移动时调整膝关节的屈曲。这些肌肉在膝关节屈曲的过程中相互协调,确保关节运动的流畅性和稳定性。膝关节伸展时,股四头肌,包括股直肌、股二头肌、股中肌和股内侧肌,它们在膝关节伸展时协同收缩,推动小腿向前伸展。位于小腿前侧的胫骨前肌帮助控制小腿的下移。半膜肌、半腱肌和股二头肌在膝关节伸展时同样提供支持和稳定性此外,腓肠肌和胫骨后肌群也在膝关节伸展中发挥一定的作用。
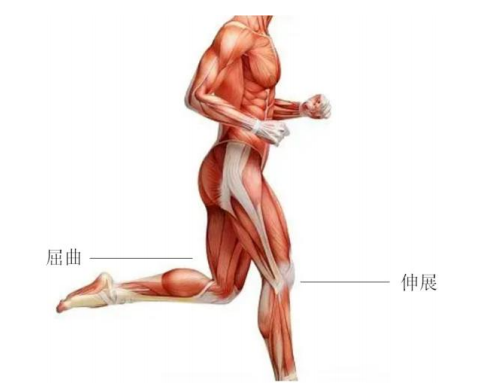
图4
3.特点
肌肉协同有以下两个特点:(a)对同一任务,不同的肌肉协同模块会被募集(对应不同的Hs),且各肌肉协同模块有不同功能。例如,健康成年人手膝爬行时,可在各肢体中分别提取支撑相协同和摆动相协同,前者主要在爬行的支撑相激活,后者主要在摆动相激活(Chen,Niu,Wu和Yu等人,2017);(b)对于不同运动任务,存在功能相似的肌肉协同,即同一肌肉协同模块可能在不同运动中被调用。D' Avella等人(D' Avella和Bizzi,2005)发现,青蛙在不同的运动中(行走、跳跃、游泳),所提取的各个肌肉协同均被调用。Chvatal等人(Chvatal和Ting,2013)在研究静态站立受外部干扰时或步行时的肌肉活动情况,发现它们有着相似的肌肉协同。Barroso等人(Barroso,Torricelli,Moreno和Taylor等人,2014)在步行过程中和骑自行车过程中提取出作用相似的肌肉作用。
三.非受控流形协同理论(UCM)
1.理论描述
在铁匠打铁轨迹的研究中,多种关节组合的变异能产生相同的锤子运动轨迹。UCM协同认为这种变异反映的是人体运动系统的灵活性、稳定性和适应性。UCM协同认为,自变量(自由度)的变异之间可相互补偿,具有误差补偿的特征(Latash,2021)。具体的说,多个自由度组合均可产生出想要的运动结果,当某一自由度发生变化时,其他自由度也会作出相应的变化,以保证运动的顺利进行。根据这一定义,运动的冗余并不会成为中枢神经系统的负担,而是作为一种丰富的资源,允许各自由度之间进行灵活的变异和配合,同时在应对其他任务或外界扰动时,仍能保持动作结果的稳定输出(Prilutsky和Zatsiorsky,2002)。因此,Gelfand等人(Gelfand和Latash,1998)提出了富余原则假设,即所有层次的自由度总是参与所有的任务,以确保结果的稳定性和过程的灵活性。过去所提出的自由度冗余隐含着"自由度过多"的意味,而自由度富余则表示越多越好。
2.简单例子(杨晨,2022)
一个较为简单的例子可以参见图5,想象两根手指挂住某样东西并使其不发生掉落,在重物重力为20N的情况下,两根手指(分别为图中的F1、F2)要持续产生20N的力量(FTOT)才能实现任务。这种情况下,为了使力量一直保持在20N,要么第一根手指产生的力量较大而第二根相应减少;要么第二根手指产生的力量较大,第一根手指产生的力量较小;要么两根手指产生一样的力量,都是10N。显然,这是一个富余系统,因为有无限个组合可以满足任务(即F1+F2=20有无数个解)。
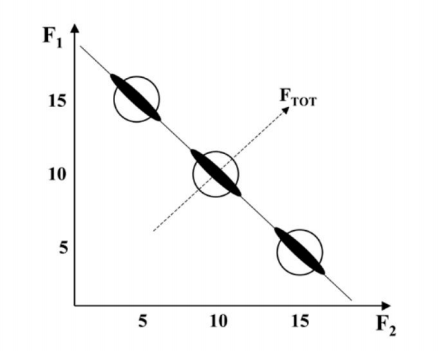
图5
3.非控制流形(UCM空间)(杨宗青,米靖,周松芳好万祥林等人,2023)
UCM理论认为,如果自由度为n的控制实现了m维空间中的目标(n>m),那么存在一个(n-m)维度的空间,称之为非控制流形或UCM空间。UCN空间的特点是,当自由度变异处于UCM空间时,该变异对最终运动结果没有影响。比如,只要F1和F2的合力为20N,那么不论它们怎么变异,此时F1和F2的变异处于UCN空间,同时保持重物不下落。
那UCM空间是如何计算出来的呢?以图6中例子作为说明,l1、l2、l3分别为上臂长、前臂长和手长,θ1、θ2、θ3为对应的3个关节角度,x和y为手指末端的位置,它们之间的关系可以表示为式3。把u=x,y设为位置向量,把θ=θ1、θ2、θ3设为关节角度向量。x0和y0为目标位置,当手指到达目标位置时,位置向量为u0=x0,y0,关节向量为θ0=θ10、θ20、θ30(由于冗余性,θ0可以有多个值,u0是确定值,只有一个)。
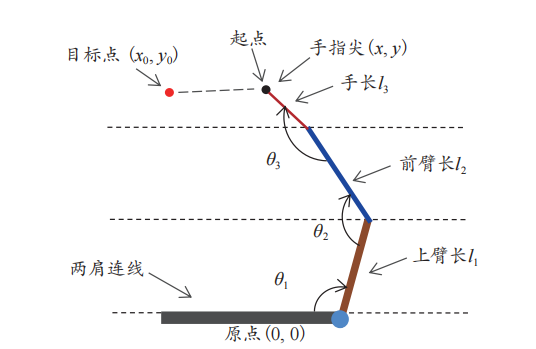
图6
根据UCM空间的定义,自变量在UCM空间中的变化不会影响目标结果,就是说,当手指到达目标位置时,不论θ0在UCM空间中如何变化,手指位置向量仍然为u0。θ0的变化可以表示为θ0的导△θ0,u0的变化可以表示为u0的导△u0(由于在UCM空间中,u0不变,因此△u0=0,0)。根据偏导的数学知识,可从式中可以推导出△u0和△θ0的关系,如式4。将△u0=0,0代入到式5中(即目标结果保持不变),解方程求取△θ0的取值范围(即UCM空间内的变异),便可得到UCM空间。根据线性代数的知识,△θ0的空间是二维,而与△θ0正交的空间是1维度。(上述所有过程不作具体运算)
式3
x = l1cos(θ1) + l2cos(θ2+θ1-π) + l3cos(θ3+θ2+θ1-2π)
y = l1sin(θ1) + l2sin(θ2+θ1-π) + l3sin(θ3+θ2+θ1-2π)
式4
式5
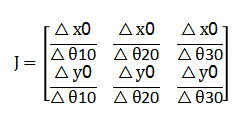
注:这种关于多元函数偏导数的行列式J被称为雅可比行列式,如式6。
式6
由于UCM空间中的变异对目标运动不会产生影响,因此在人体运动控制中,对于位于UCM空间中的变异,神经系统没有必要对其施加控制。而对于与UCM空间正交补空间中的变异,才有必要加以控制。在运动技能的学习中,一个运动可能同时包含UCM空间中的变异和正交补空间中的变异。设VGOOD为UCM空间中的变异的变异程度,VBAD为正交补空间的变异的变异程度。在学习初期VBAD>VGOOD(如图(b)),这时需要神经系统费力加以控制。随着学习的进行,VBAD开始等于VGOOD(如图(a)),然后到VBAD<VGOOD(如图(c)),此时动作开始变得自动化,无需费力控制。(图以上述"两根手指(F1、F2)持续产生20N力量"的例子为例)
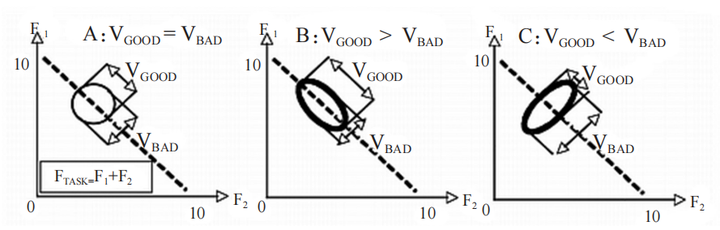
图7(a) 图7(b) 图7(c)
四.平衡点假说
该假说认为从中枢神经系统发送到外周的信号是调节每个肌肉的阈值长度(通过alpha运动神经和gamma运动神经),每个肌肉都按照设置好的阈值长度变化,当所有肌肉到达各自的阈值长度时即达到平衡点。在肌肉长度变化的过程中,运动轨迹、肌肉激活、力和力矩等参数不会被限定,如各肌肉可以通过不同的运动轨迹到达平滑点(Feldman和Levin,2009)。换言之,神经系统只需指定肌肉元素所处的位置,而无需指定哪些参数或如何工作来控制动作。当平衡状态受到干扰时,机体将会激发相应的运动予以应对,从而维持平衡状态。
对照设置假说是平衡点假说的发展。此假说被用来对多肌肉群,多关节甚至全身参与的运动(比如跳舞)进行描述。具体的说,中枢神经系统给人体建立了一个对照设置,这种预设的对照值会给人体提供一个姿势的位置参数,如果身体的实际姿势与中枢神经系统设定的位置参数一致,则不会观察到肌肉的激活;如果身体发生偏移,则控制姿势的肌肉会根据预设的位置参数进行调整,回到平衡点。(Feldman和Levin,1995)
可以用如何抓住一只杯子的例子来说明(王爱文和罗冬梅,2017),图8表示的是一个截面图,TH表示拇指,VF代表其余4指(I-食指,M-中指,R-无名指,L-小指),L表示外力(重力)。整个过程需要人对3种对照设置进行控制:
(a)拇指与其余4指的距离(APREF)
(b)杯子的纵向位置(ZREF)
(c)杯子的方向(αREF)
人通过控制拇指与其余4指的距离,从而生成手与杯壁之间的压力Fn,继而产生向上的摩擦力Ft,从而抵消掉杯子受到的向下的外力L;通过控制杯子的方向α,从而保证水不会洒出来;通过控制杯子的纵向位置Z,保证杯子固定在一个位置。
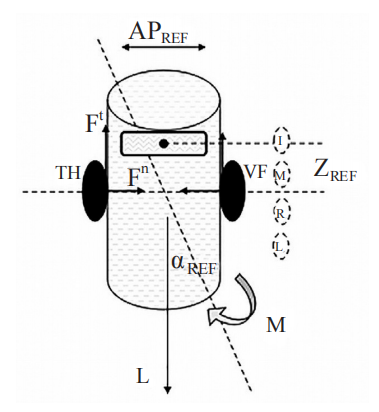
图8