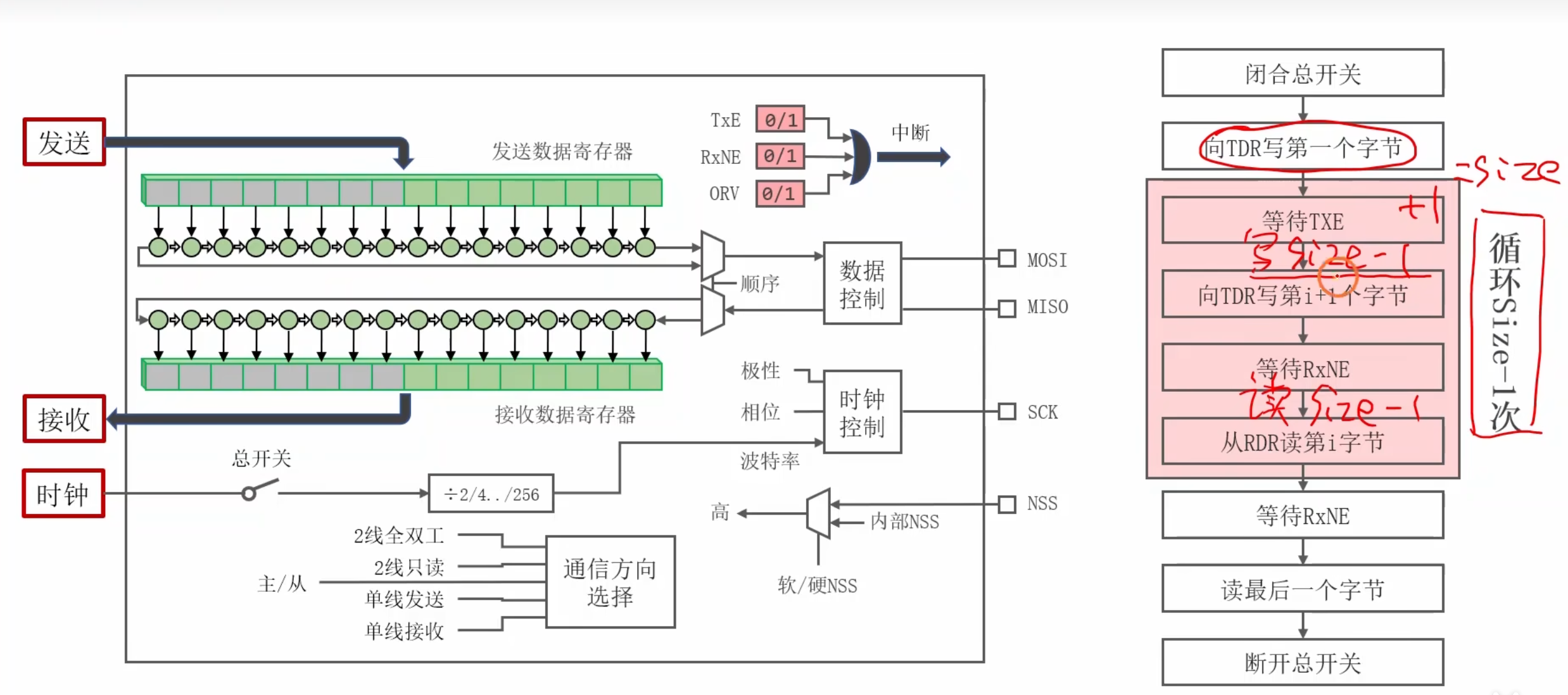
1、作用
通过SPI链接片上FLASH外设W25Q64(相当于一个移动硬盘):
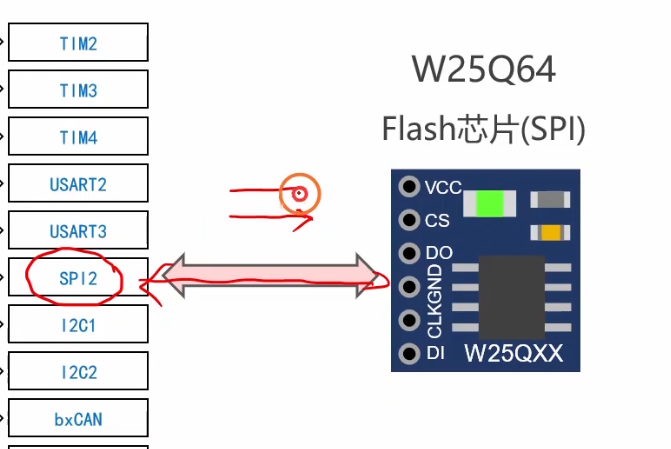
2、W25Q64原理图
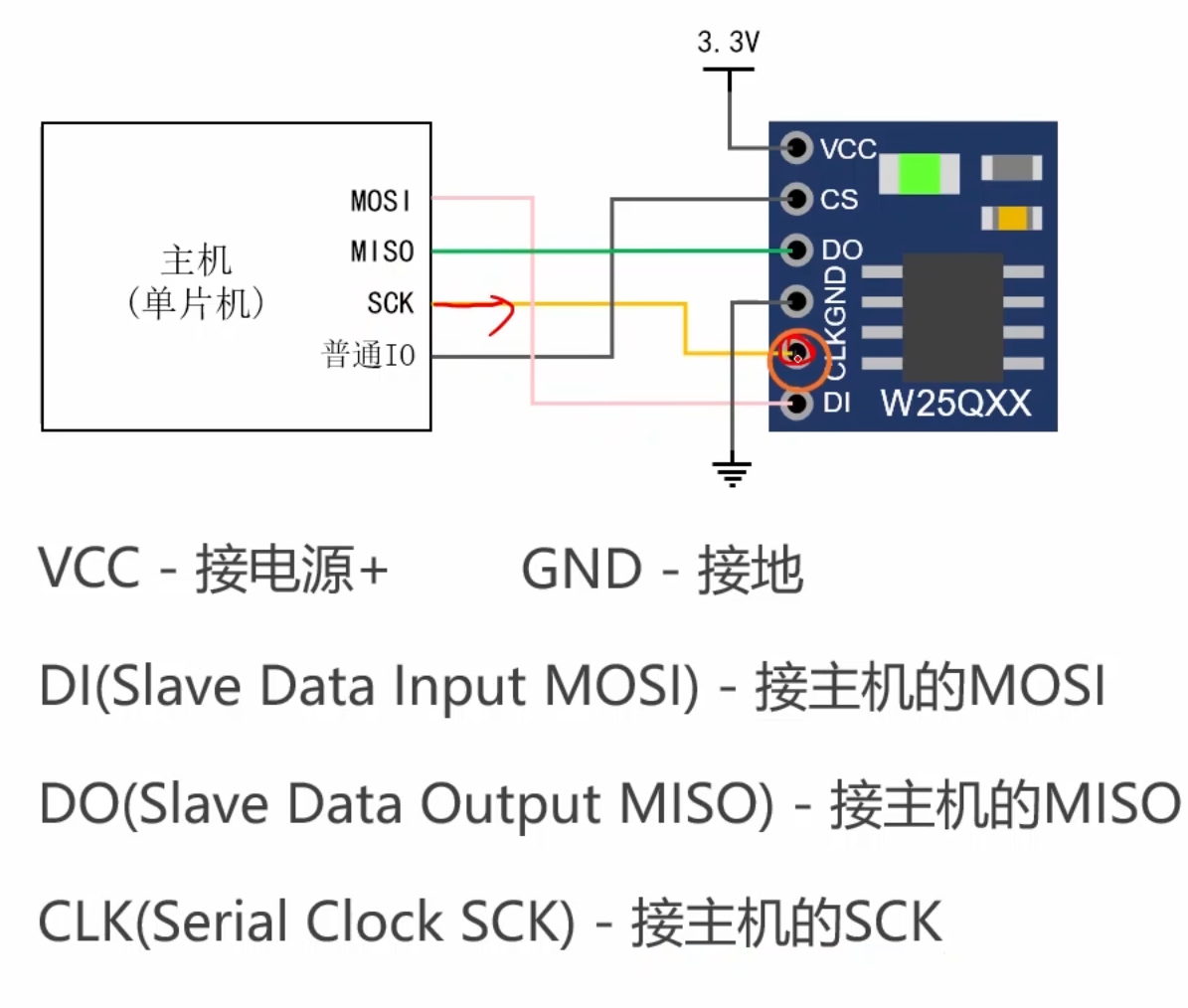
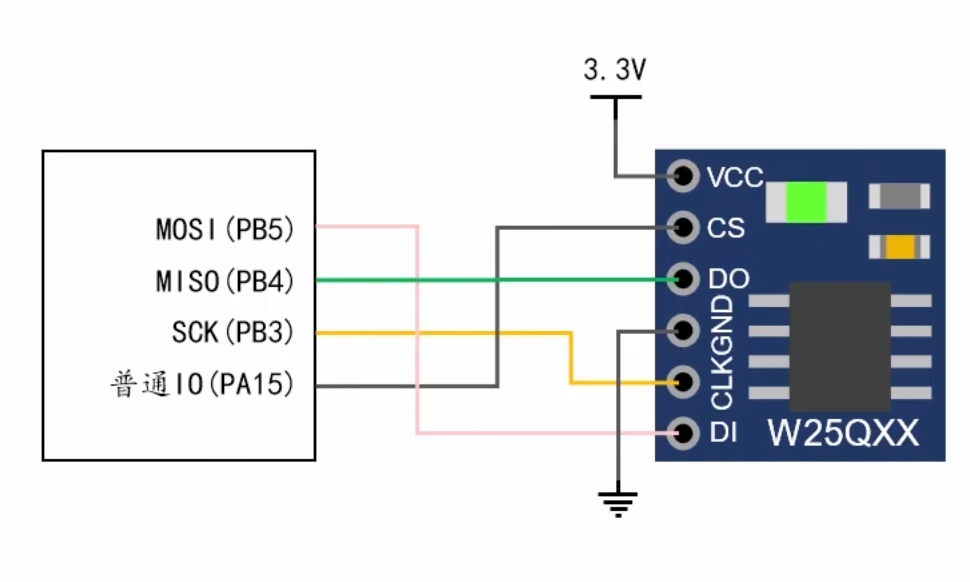
3、接线图
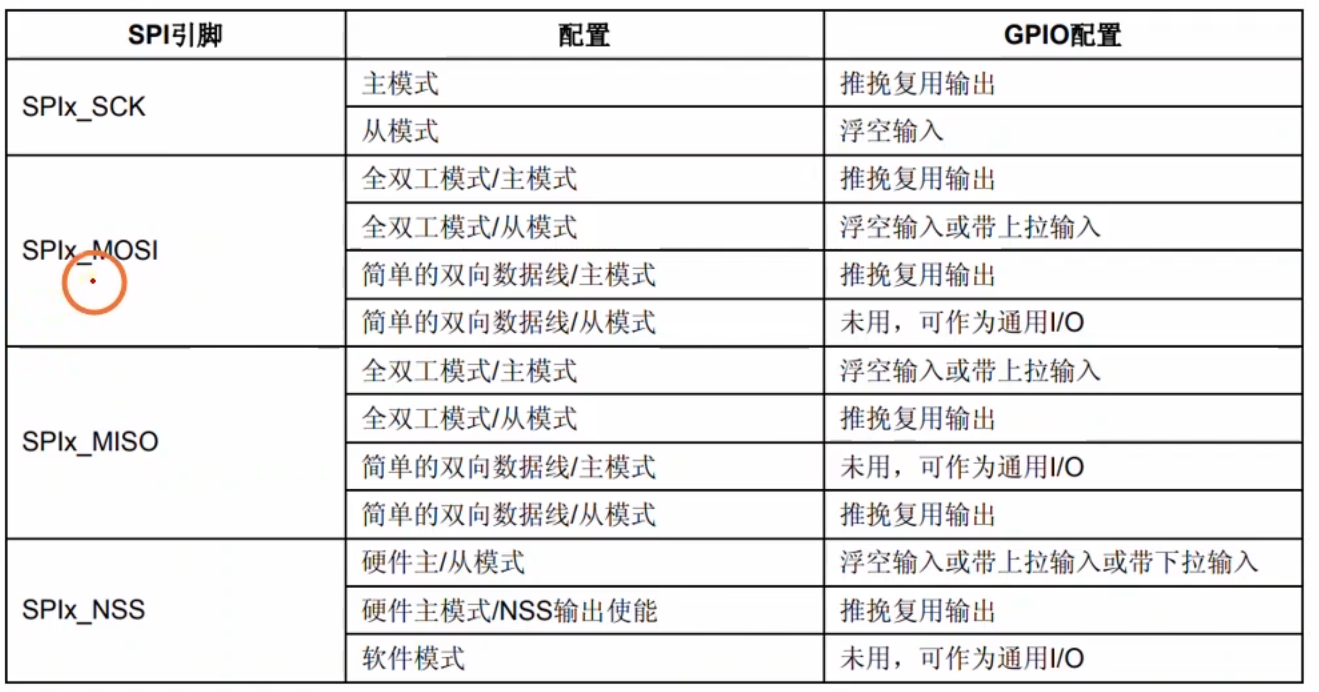
4、SPI模式选择
PB3 -> SCK 复用输出推挽 2MHz
PB4 -> MISO 输入上拉 /
PB5-> MOSI 复用输出推挽 2MHz
PA15->普通IO 通用输出推挽 2MHz
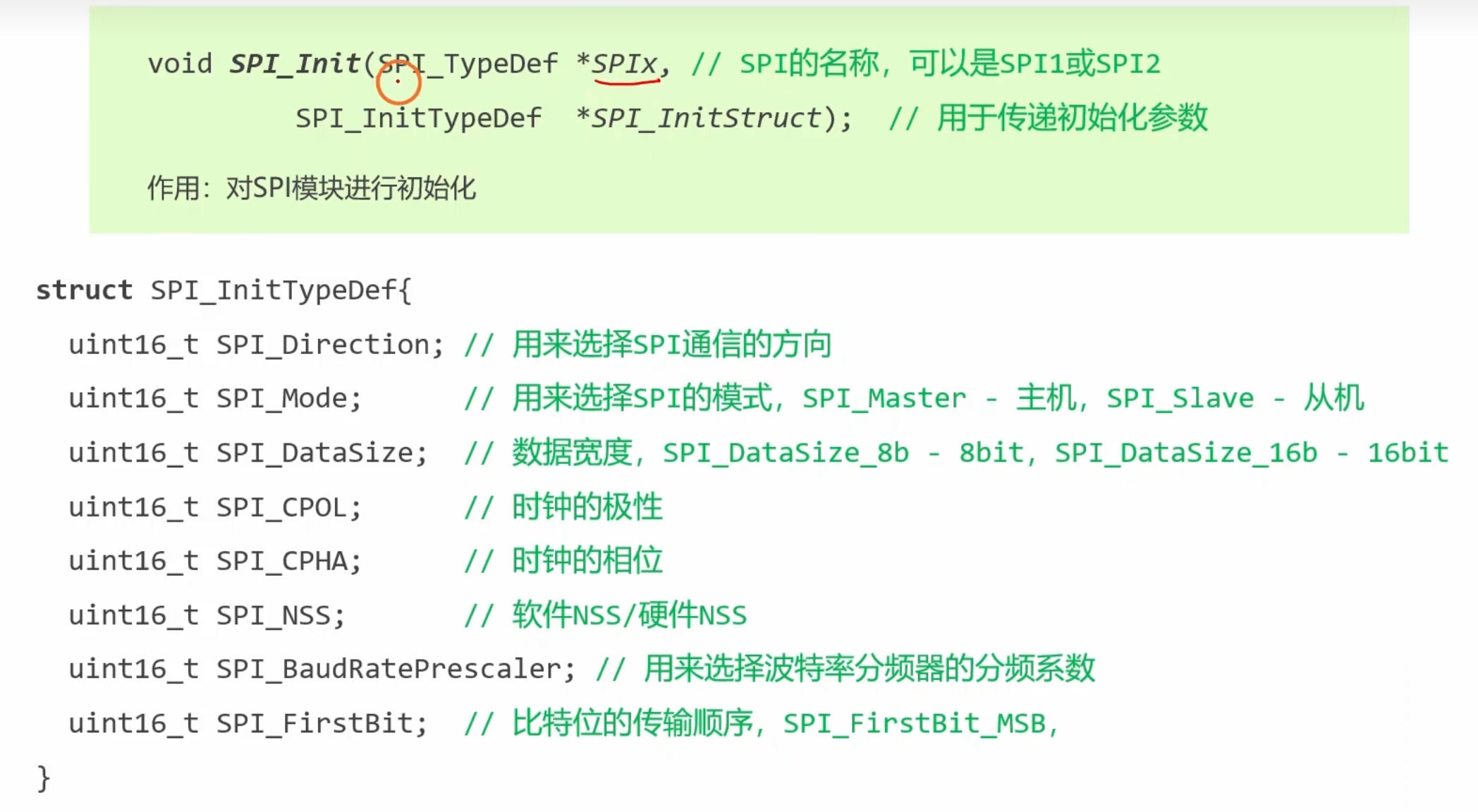
5、SPI初始化
5.2通信方向
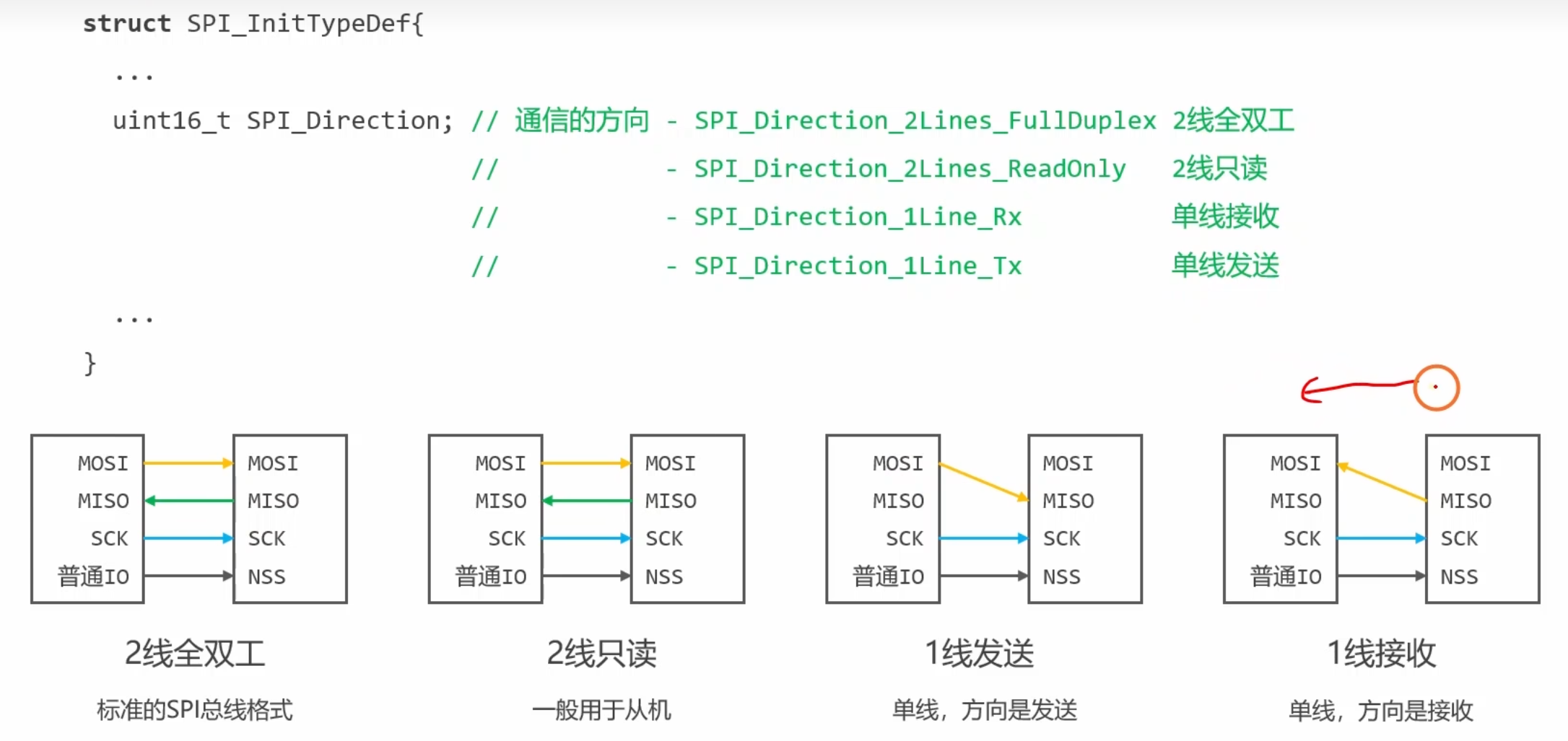
1. 2 线全双工(SPI_Direction_2Lines_FullDuplex)
- 硬件连接:MOSI、MISO、SCK、NSS 全部使用(标准 SPI 格式)
- 特点 :主机和从机可同时收发数据,是最常用的 SPI 模式
2. 2 线只读(SPI_Direction_2Lines_ReadOnly)
- 硬件连接:保留 MOSI、MISO、SCK、NSS,但方向为只读
- 特点:主机仅接收数据(从机发送),一般用于从机设备只输出数据的场景
3. 1 线发送(SPI_Direction_1Line_Tx)
- 硬件连接:MOSI 与 MISO 复用为 1 根单线,SCK、NSS 保留
- 特点 :半双工,主机仅发送数据,不接收,单线承担发送功能
4. 1 线接收(SPI_Direction_1Line_Rx)
- 硬件连接:同 1 线发送,单线复用
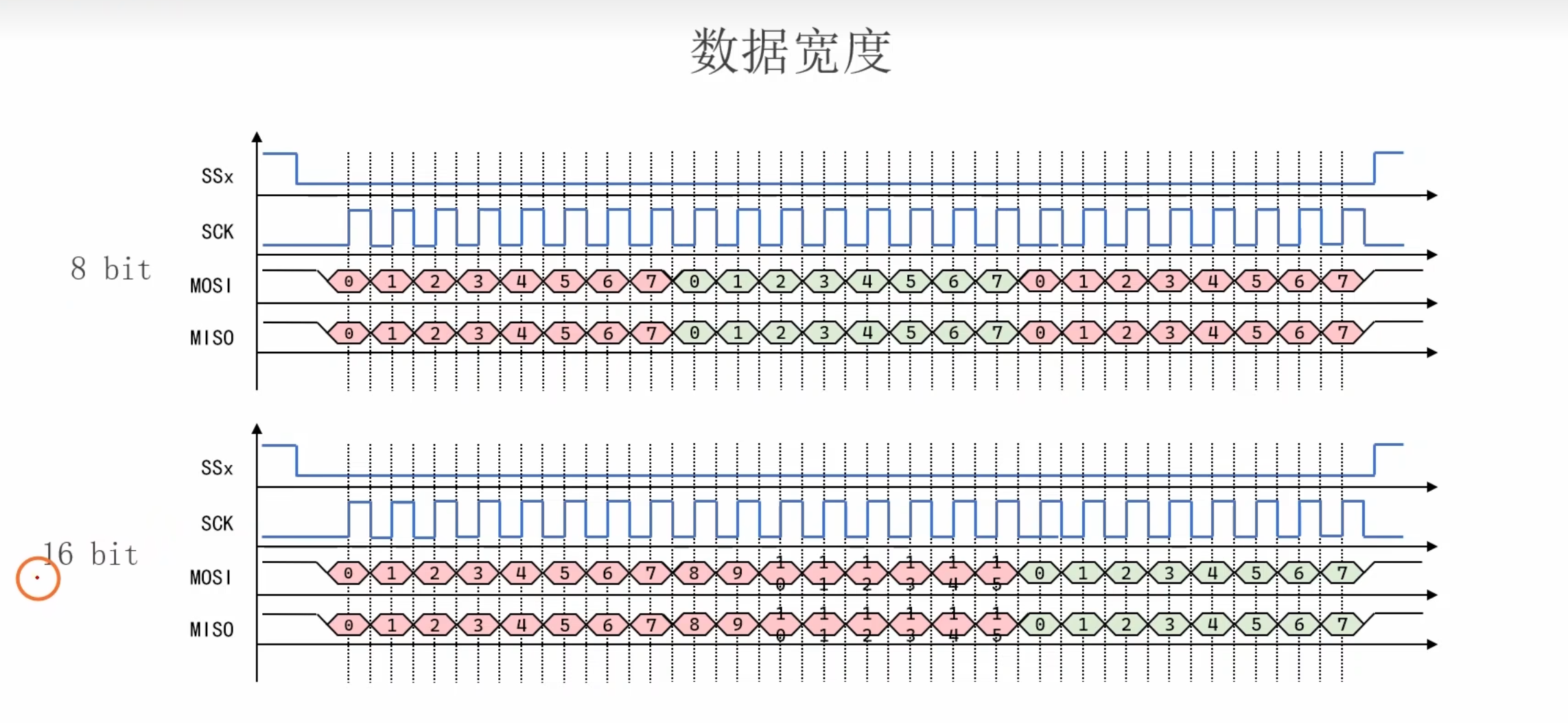
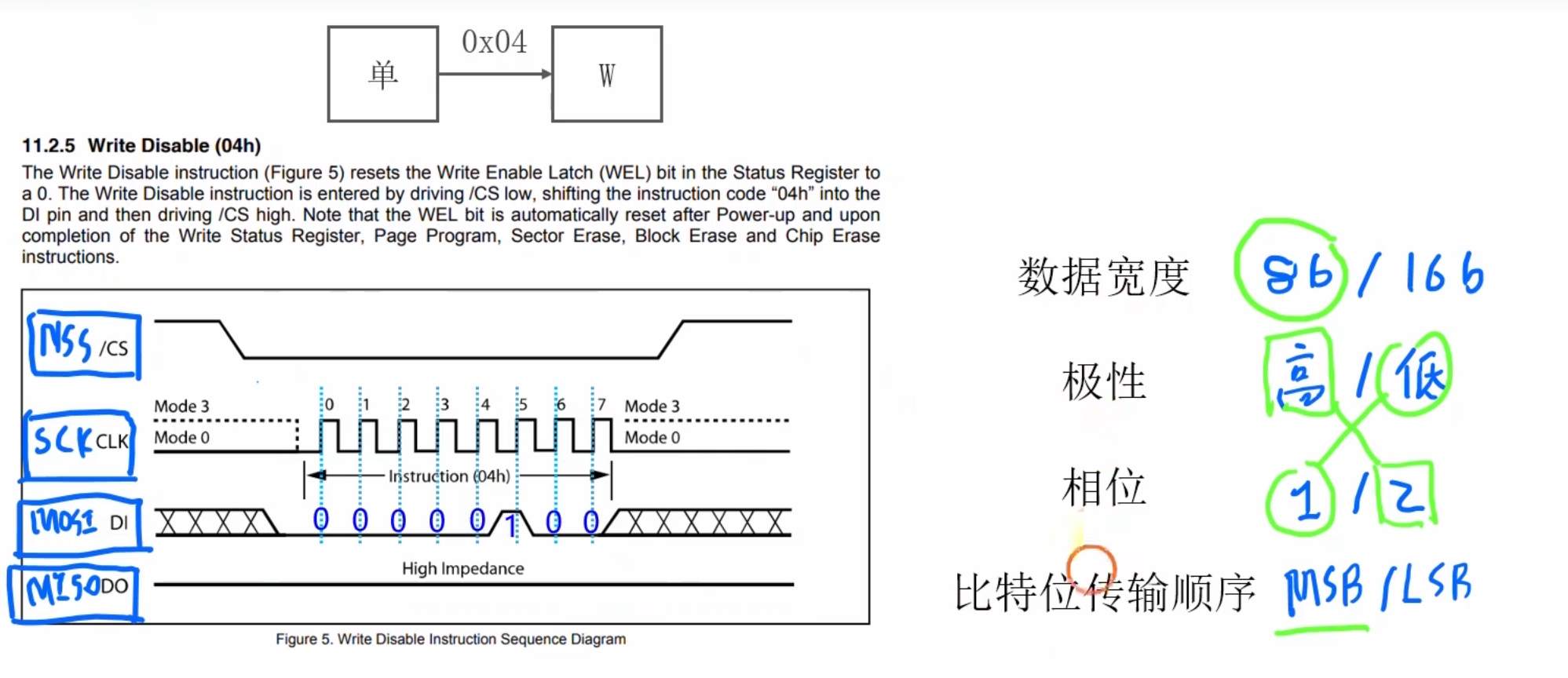
5.3数据宽度
5.4 极性与相位
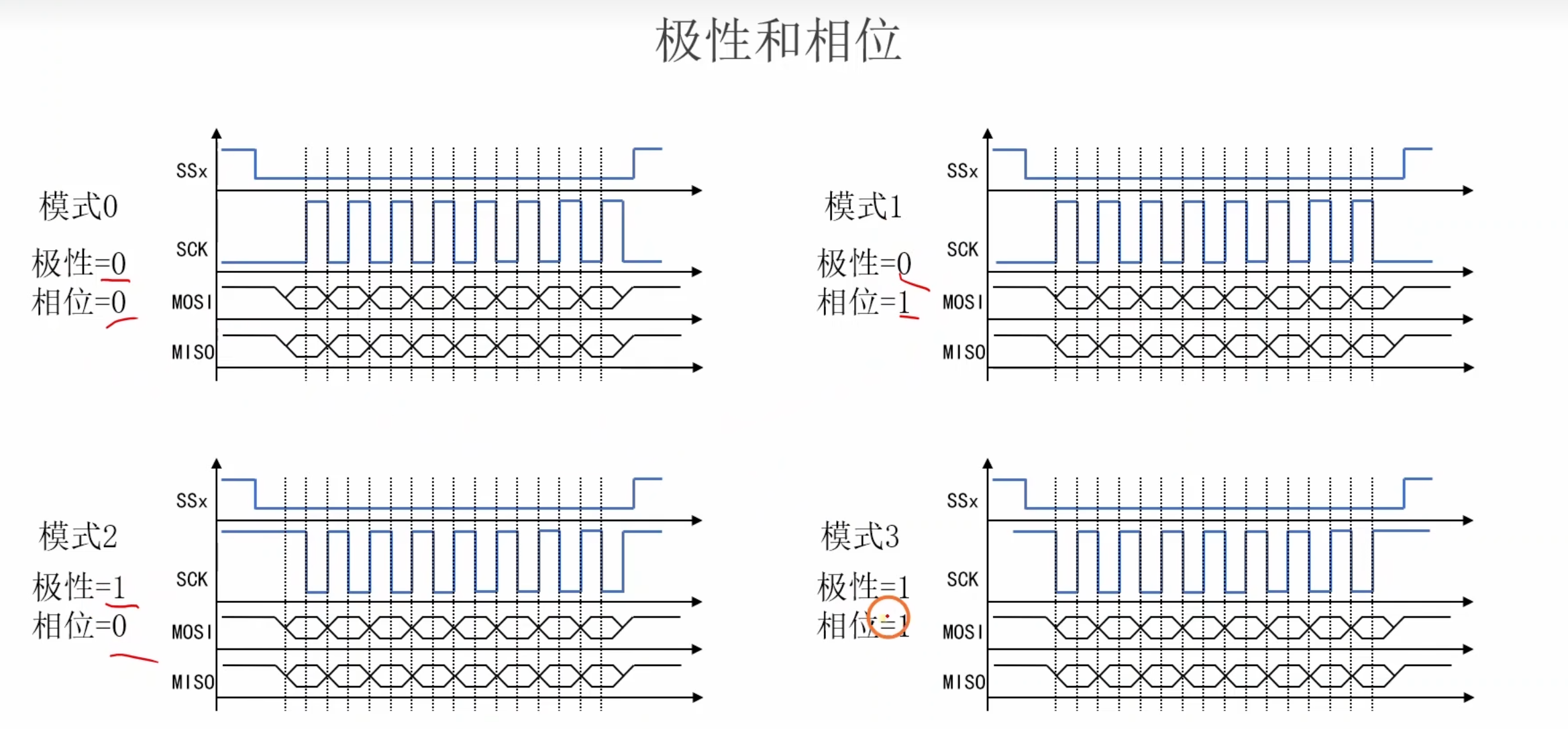
极性:SCK在空闲状态下是高电位则是1,低电位则是0
相位:接收方在什么时候对数据进行采集
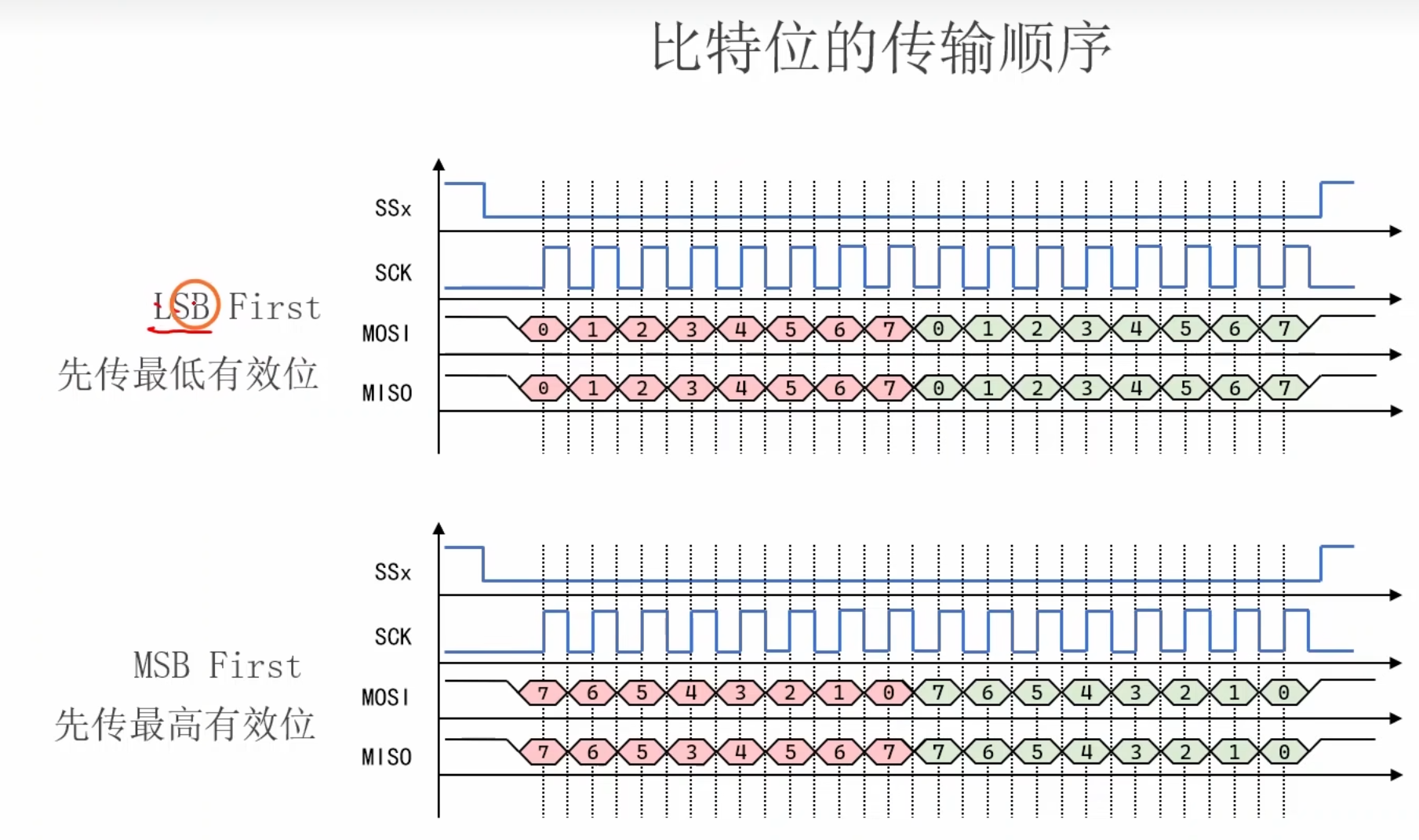
5.5 比特位传输顺序
6、W25Q64模式选择
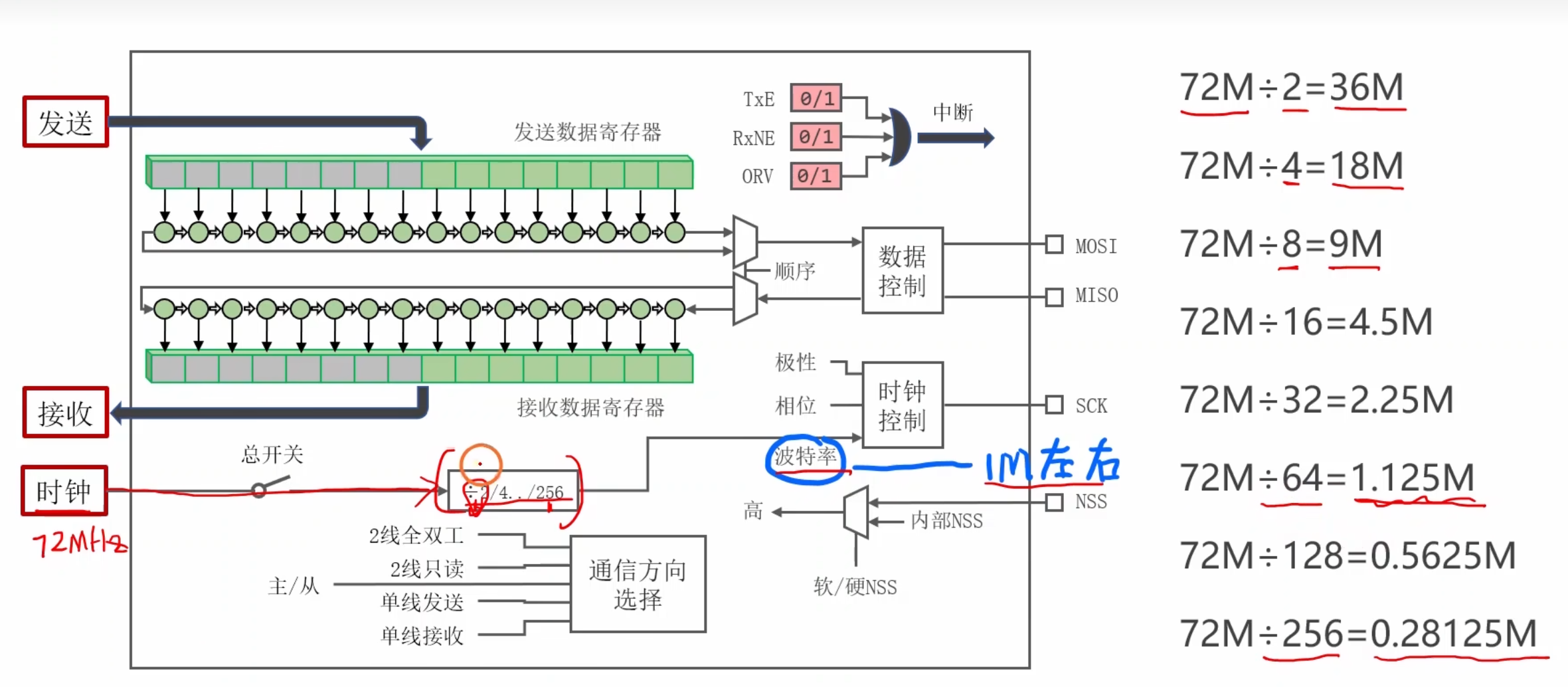
5.6 比特率选择
选择64分频
cpp
// #2 对SPI本身进行初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE);
SPI_InitTypeDef SPI_InitStructure;
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_64;6、NSS配置
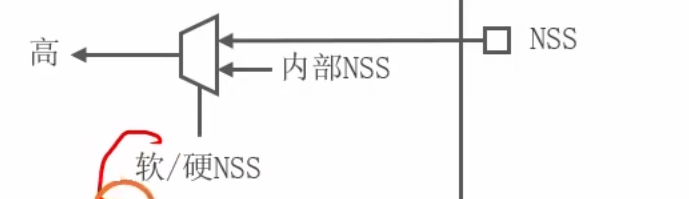
分为两种,一种是软一种是硬
硬件NSS通过外置3.3v的高电压,来确定哪个是主机哪个是从机
设置软NSS:
cpp
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;向内部NSS写1则等同为外置3.3v高电压,写0则为低电压
cpp
SPI_NSSInternalSoftwareConfig(SPI1,SPI_NSSInternalSoft_Set);7、SPI收发数据原理图