GPIO:Gemral Pupose Input Output,通用目的输入输出。
引脚->输入输出引脚
GPIO 输入模式:监测引脚电平变化。
GPIO 输出模式:给定引脚高电平/低电平下,控制引脚输出高电平/低电平
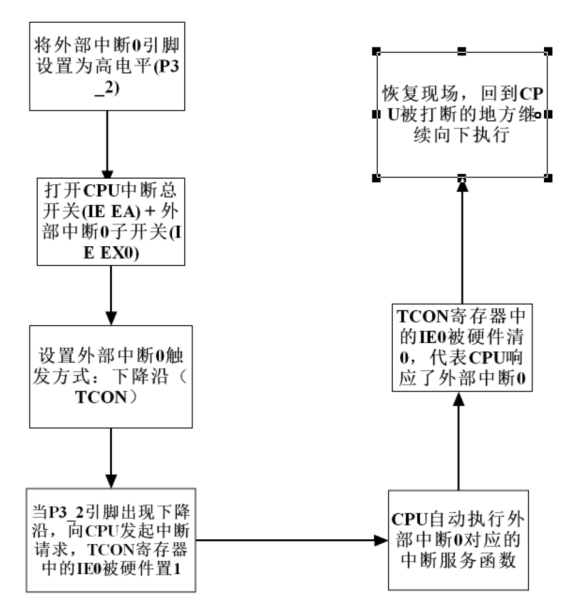
一、中断系统
概念:当中央处理机CPU正在处理某件事的时候外界发生了紧急事件请求,要求CPU暂停当前的工作,转而去处理这个紧急事件,处理完以后,再回到原来被中断的地方,继续原来的工作,这样的过程称为中断。
实现这种功能的部件叫中断系统。
中断源:能够打断CPU执行当前任务源头/事件叫做中断源。
51单片机:5个中断源
外部中断0、外部中断1、定时器0、定时器1、串口。
外部中断:引脚电平的变化所引发的中断。
中断优先级:CPU处理中断任务时,需要比较中断优先级,优先去处理优先级更高的中断请求中断嵌套:CPU再处理一个中断任务时,嵌套处理其他优先级更高的中断任务(51单片机最多允许嵌套两层)。
中断处理流程:
1.中断源发起中断请求
2.检查CPU是否允许中断及中断源是否被屏蔽
3.比较中断优先级
4.保护现场
5.执行中断服务函数
6.恢复现场
中断向量表:本质上是一个数组,数组中存放的是中断服务函数的入口地址
中断向量:中断向量表中各中断服务函数的标号
cs
#include <reg51.h>
#include "key.h"
unsigned int g_n = 0;
// 外部中断0 中断服务函数
void int0_handler(void) interrupt 0
{
g_n++;
}
// 外部中断0 初始化函数
void int0_init(void)
{
// 将外部中断0引脚拉高
P3 |= (1 << 2);
// 打开CPU中断总开关
IE |= (1 << 7);
// 开启外部中断0子开关
IE |= (1 << 0);
// 设置外部中断0触发方式:下降沿触发
TCON |= (1 << 0);
}二、定时器
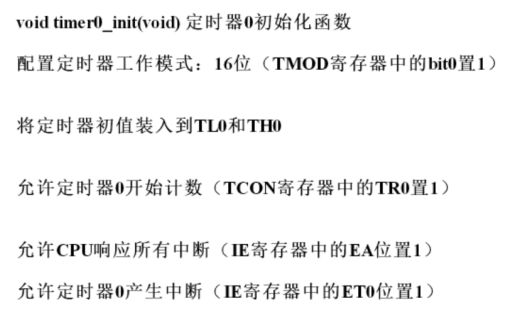
定时器:能够产生一个精准的定时。
时序:以时间先后次序,描述引脚上电压变化。
16位自增型定时器/计数器
0-65535
unsigned short count=65535 - 922 = 64613;
从初值开始++,+到6535溢出后向CPU发起定时器中断请求(初值大小,自增速率)。
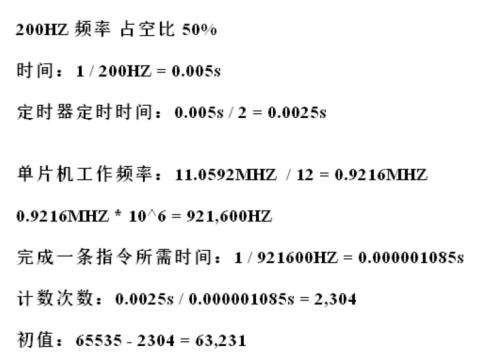
Clock:时钟,CPU运行的速率晶振频率:11.0592MIHZ
分频器:可以将晶振提供频率/分频系数,降低频率。
51单片机工作频率:11.0592MIHZ/12=0.9216MHZ
++所需要的时间:1/0.9216MIHZ=1.085uS1ms
定时:1ms=1000us
计数次数:1000us/1.085us=922
初值:65535-922 = 64613
cs
void timer0_init(void)
{
TMOD &= ~(0x0F << 0);
TMOD |= (1 << 0);
TL0 = 64613;
TH0 = 64613 << 8;
TCON |= (1 << 4);
IE |= (1 << 7);
IE |= (1 << 1);
}
// 外部中断0服务函数
void timer0_handler(void) interrupt 1
{
TH0 = 64613 >> 8;
TL0 = 64613;
g_i++;
if (g_i >= 1000)
{
led_nor();
g_i = 0;
}
}三、蜂鸣器
PWM:脉冲宽度调制,能够产生一个方波,能够让引脚电平周期性发生变化
PWM周期:一个方波所经历的时间(从上升沿/下降沿到下一个上升沿/下降沿)
PWM占空比:高电平在一个周期内所占的比例。
声-》波->音调->频率 高音 高频 低音 低频 音量->波的振幅能量大小有源蜂鸣器:存在震荡源,通电后会持续发出固定频率声音
无源蜂鸣器:不存在震荡源,通电后不会发出声音,需要给定一个震荡