环境准备
1 安装 nvm for Windows(建议用最新版)
Windows 用户到 GitHub Releases 下载 nvm-setup.exe:https://github.com/coreybutler/nvm-windows/releases
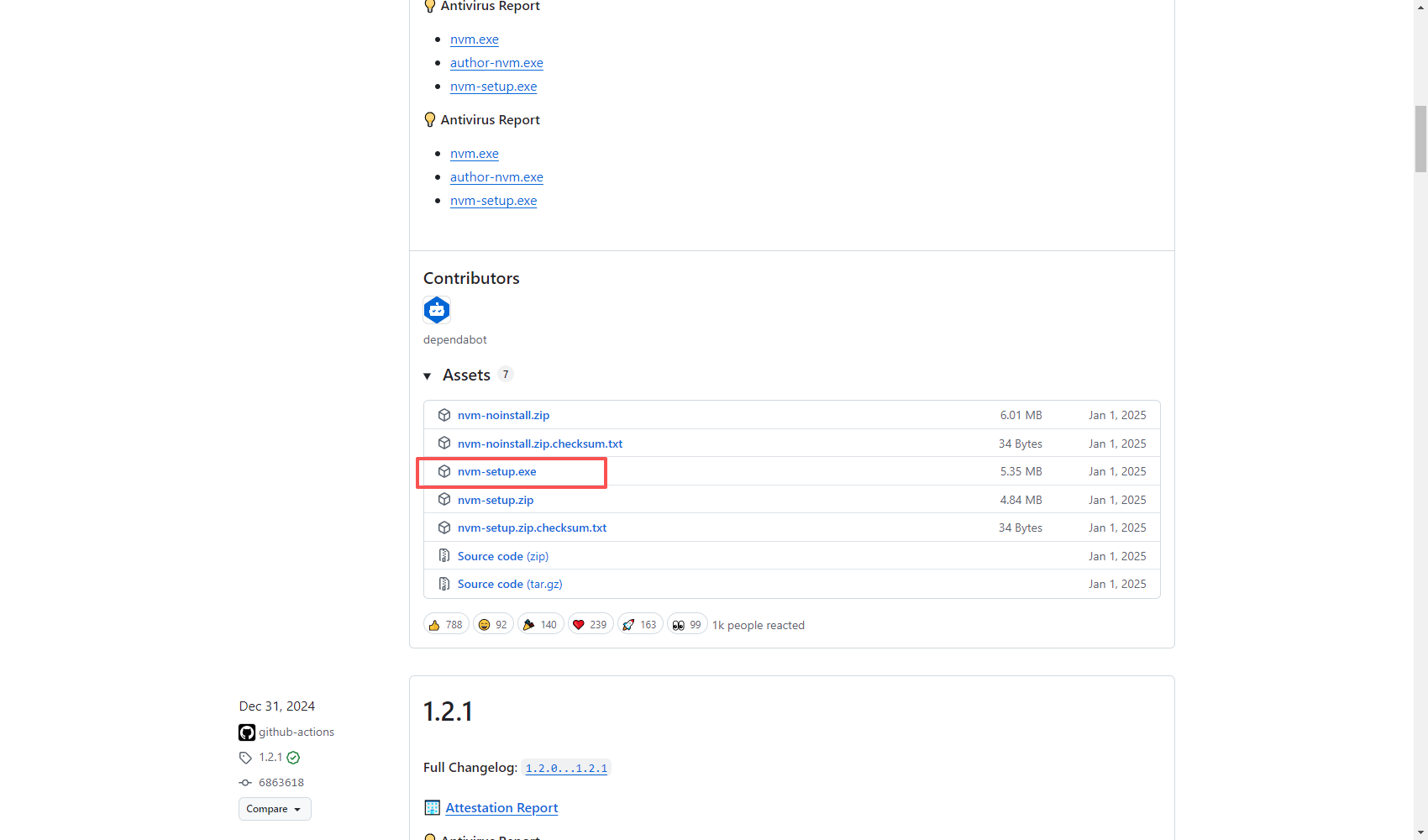
装过程一路 Next 即可。安装成功后建议你用 管理员权限打开 PowerShell
2 安装node.js
按照顺序在 powershell 中运行下列指令
bash
# 安装指令
nvm install 22
# 使用指令
nvm use 22.22.0前期准备
安装核心依赖:
- Node.js:v22+版本,下载地址https://nodejs.org/zh-cn/download/current/(安装时勾选"Add to PATH",自动配置环境变量);
- Git:下载Windows版本并安装(https://git-scm.com/download/win);
环境验证与权限配置:
# 以管理员身份运行PowerShell
# 检查Node.js安装情况
node --version
# 解锁脚本执行权限(避免安装时权限报错)
Set-ExecutionPolicy -ExecutionPolicy RemoteSigned -Scope CurrentUser
# 出现提示后输入Y并回车确认步骤1:安装OpenClaw
执行安装命令
bash
npm install -g openclaw@latest --registry=https://registry.npmmirror.com
# 验证安装结果
openclaw --version步骤2:初始化配置
bash
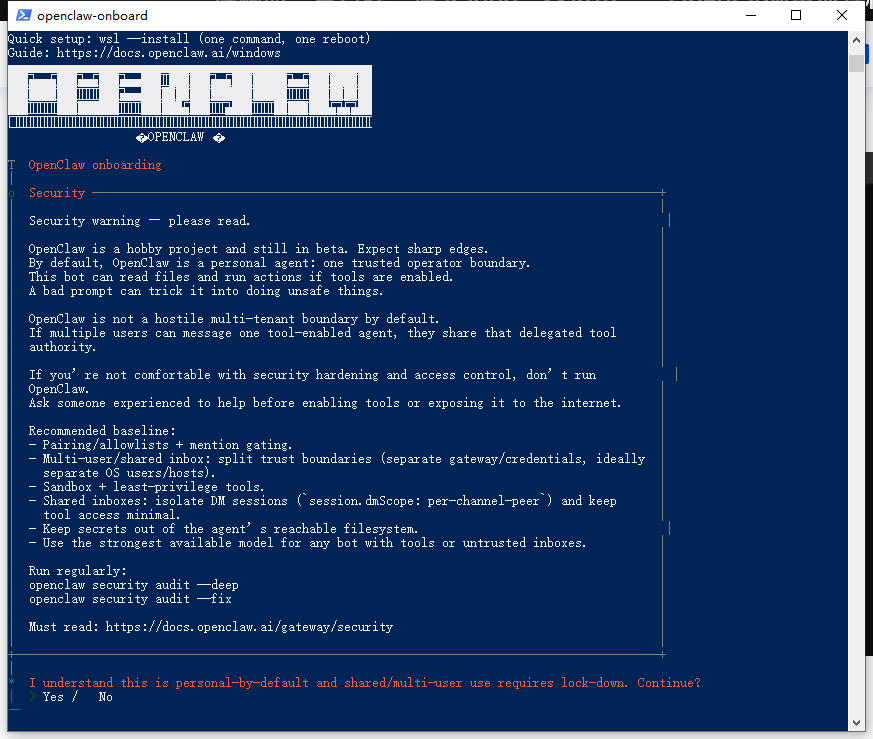
openclaw onboard --flow quickstart第一个风险提示,选择YES
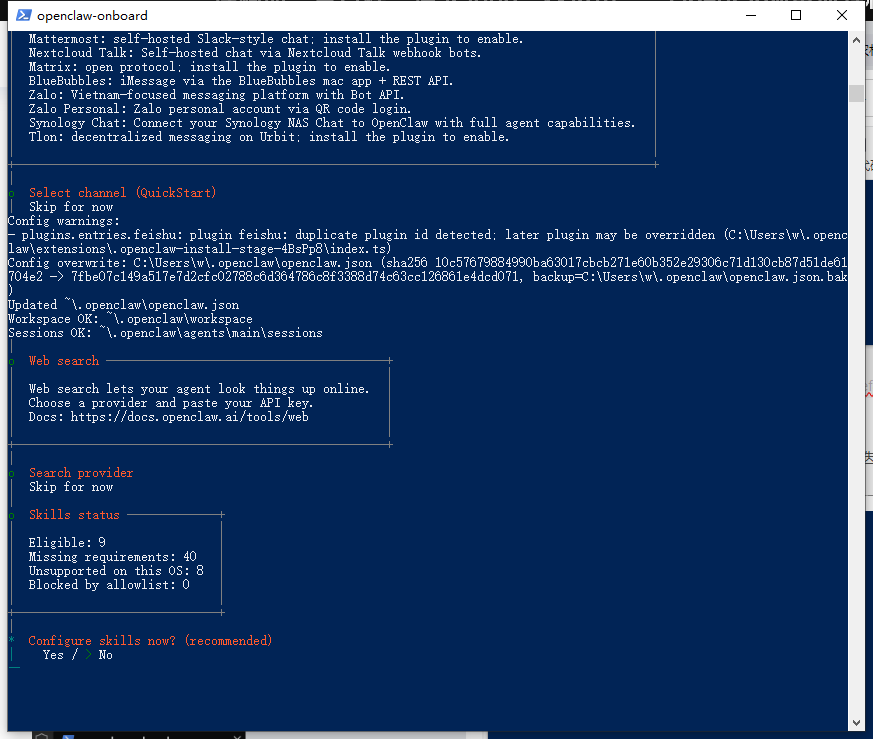
之后按照提示选择模型以及API、key、model等。
通讯工具和skills可以先跳过,后期再使用过程中根据需要迭代。
安装启动网关后,它会自动新开一个 PowerShell 窗口,都不要关闭。
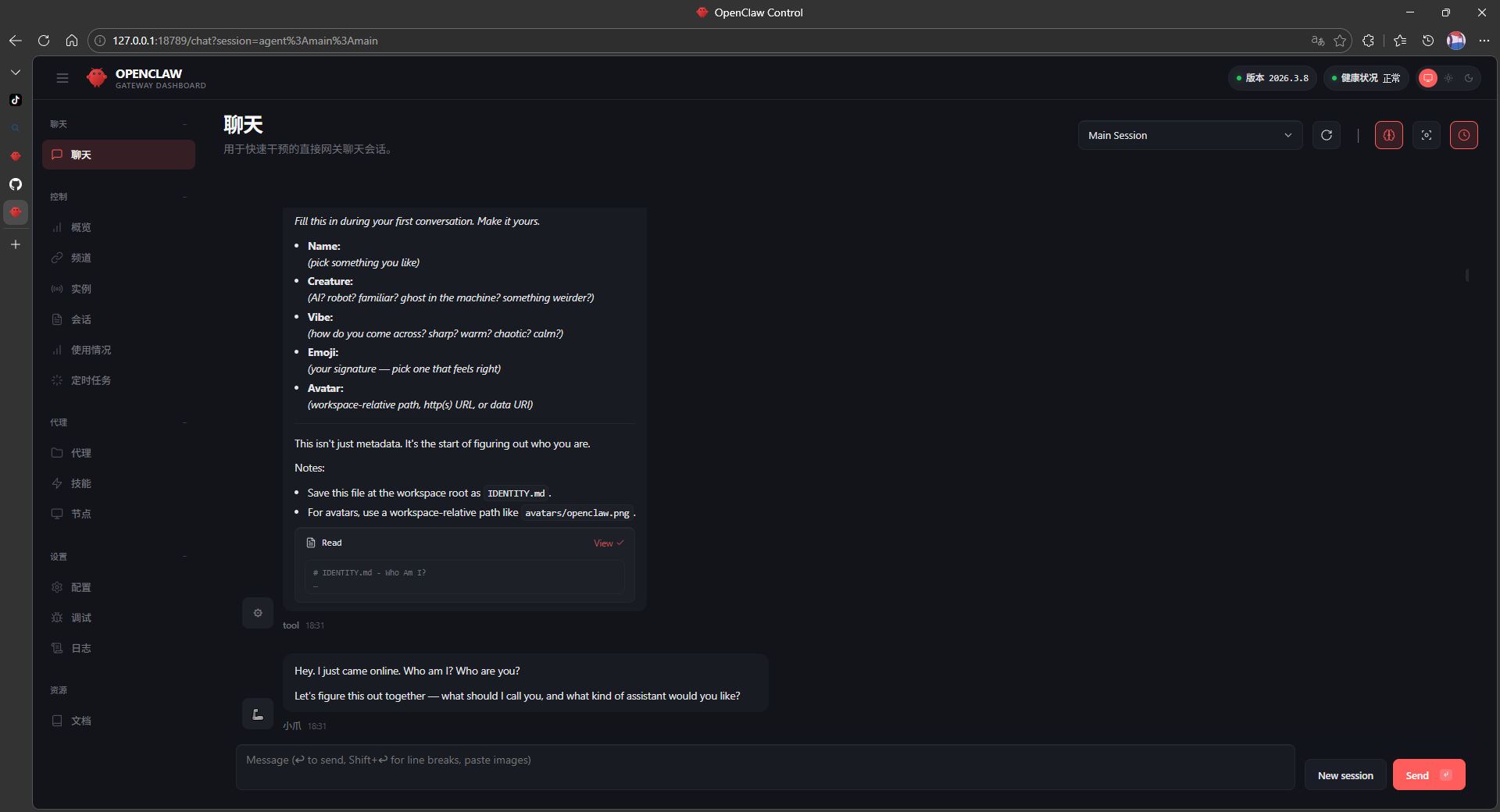
浏览器会自动打开控制台。后续你也可以直接访问:http://127.0.0.1:18789/
发消息测试,有回复就说明安装成功:
步骤3:连接飞书
1 OpenClaw安装飞书插件
可以直接发消息让它执行安装:
bash
openclaw plugins install @m1heng-clawd/feishu
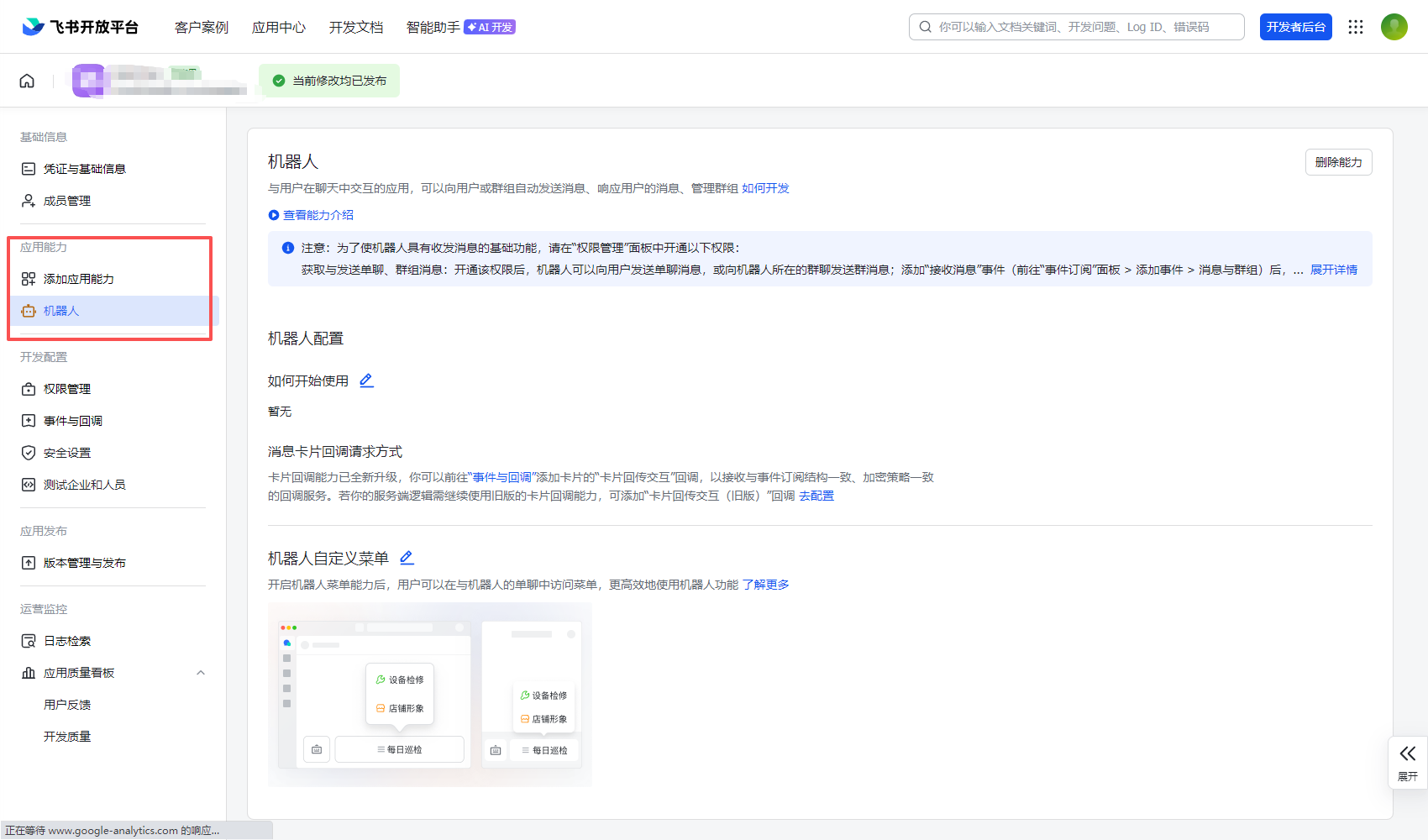
2 飞书开放平台创建应用
进入飞书开放平台:https://open.feishu.cn/ 创建一个应用,添加机器人能力
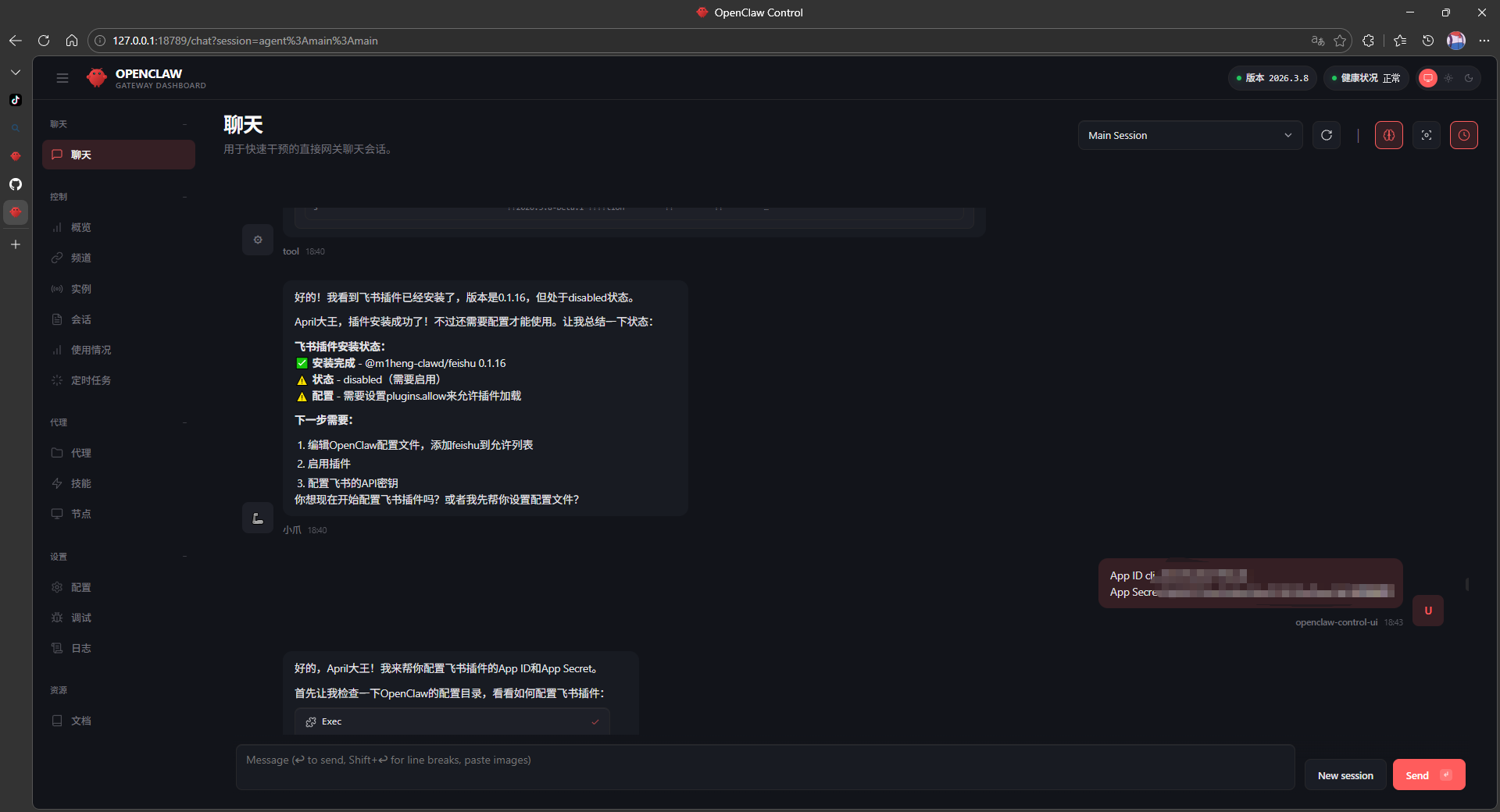
然后把App ID 和 App Secret 复制出来
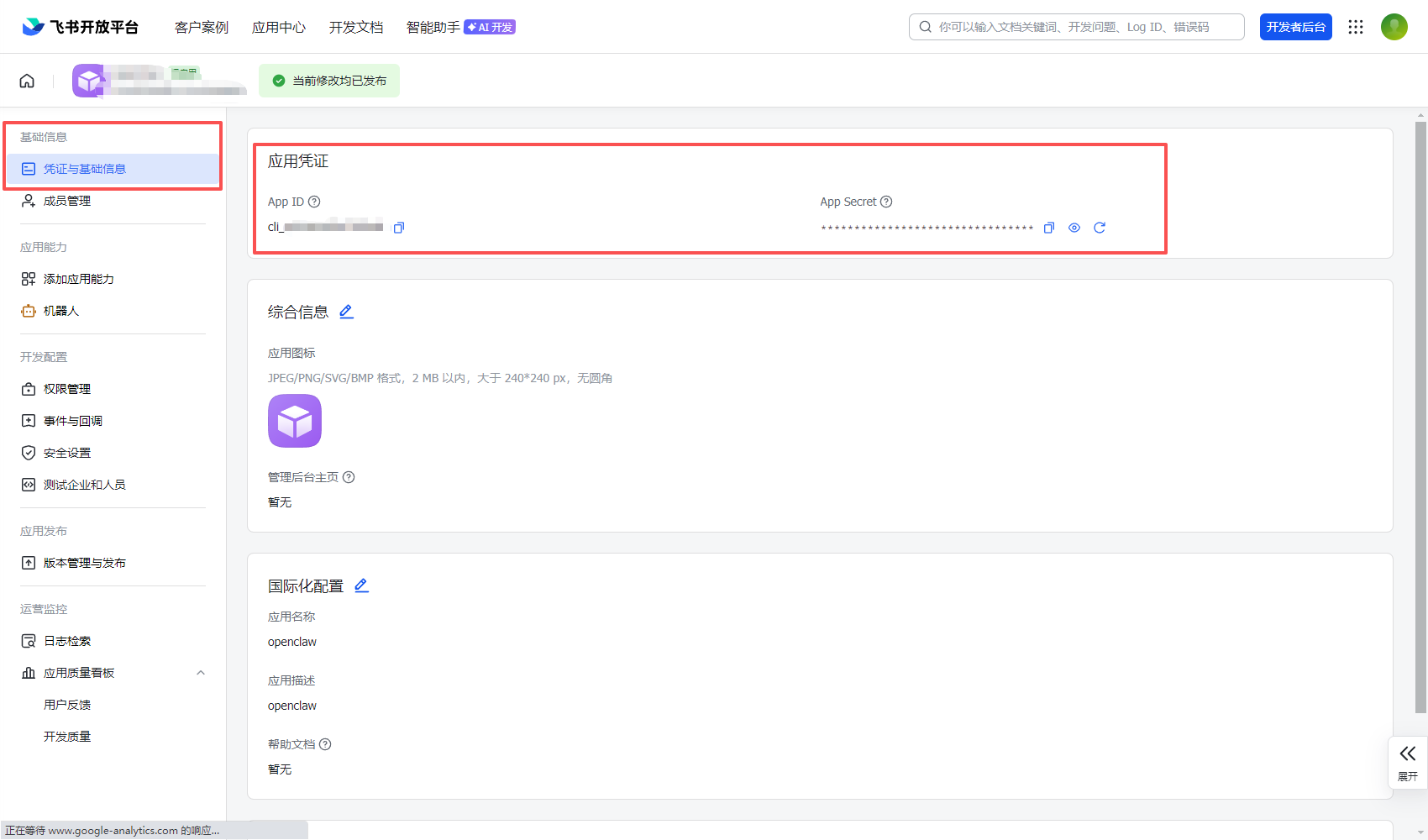
这两项提供给 OpenClaw ,让它完成配置
3 导入权限
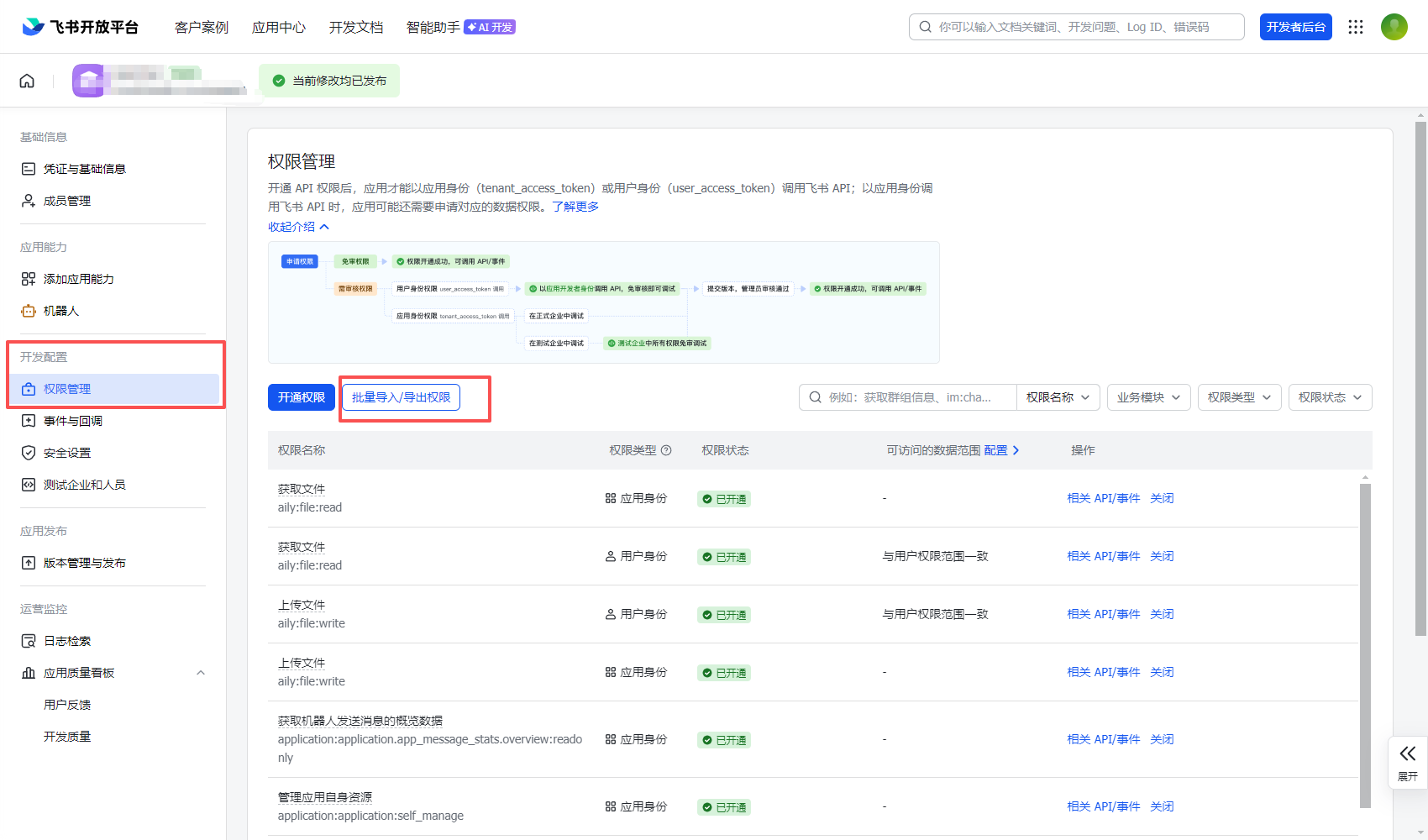
粘贴导入:
bash
{
"scopes": {
"tenant": [
"aily:file:read",
"aily:file:write",
"application:application.app_message_stats.overview:readonly",
"application:application:self_manage",
"application:bot.menu:write",
"contact:user.employee_id:readonly",
"corehr:file:download",
"event:ip_list",
"im:chat.access_event.bot_p2p_chat:read",
"im:chat.members:bot_access",
"im:message",
"im:message.group_at_msg:readonly",
"im:message.p2p_msg:readonly",
"im:message:readonly",
"im:message:send_as_bot",
"im:resource"
],
"user": ["aily:file:read", "aily:file:write", "im:chat.access_event.bot_p2p_chat:read"]
}
}导入完成后点击"确认新增权限"
4 事件订阅
进入「事件与回调」页面:
「事件配置」→「订阅方式」
选择:使用长连接接收事件
保存
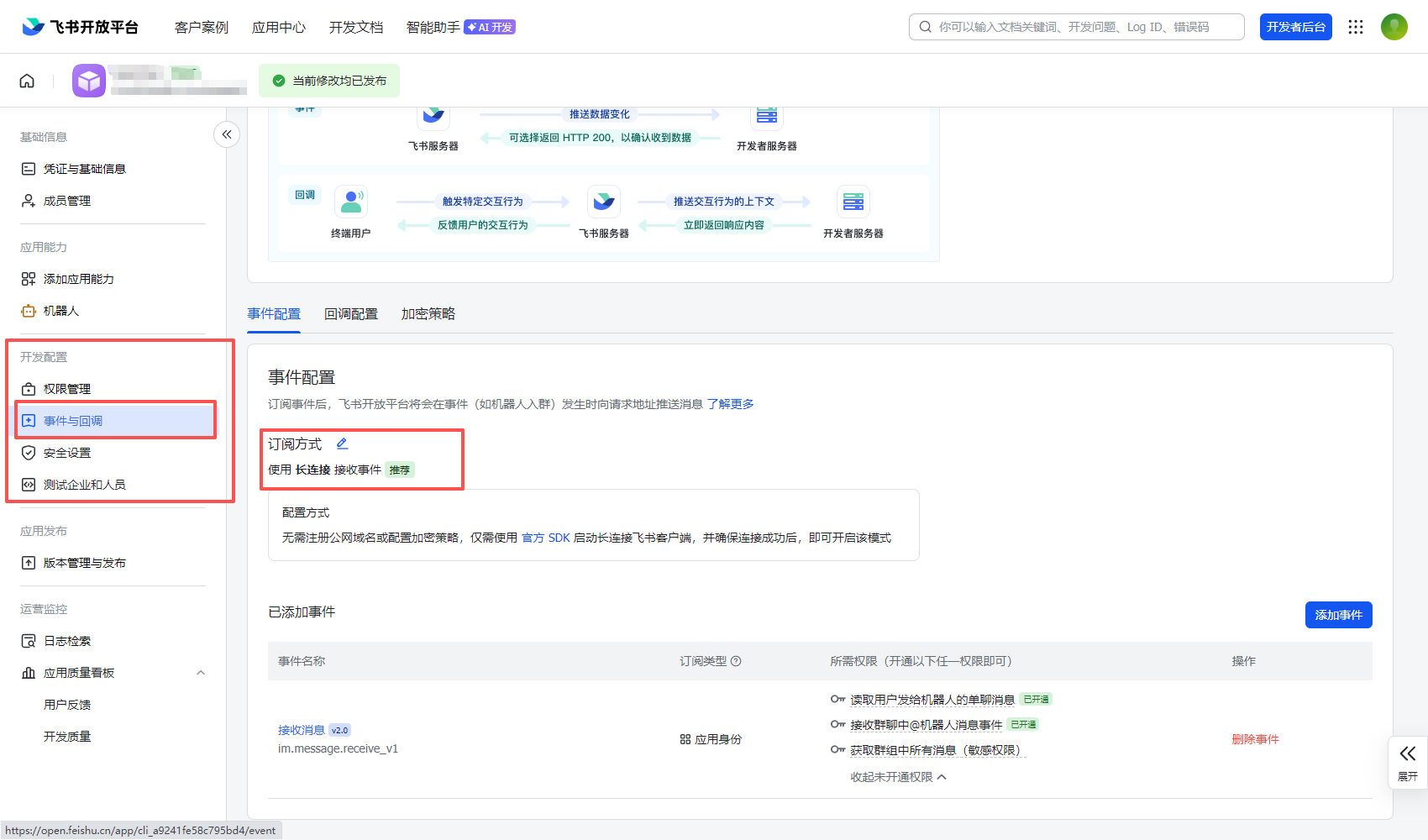
5 添加接受消息事件
在「事件配置」页面点击「添加事件」,搜索并添加:
不添加,机器人收不到消息
bash
im.message.receive_v16 发布版本
进入「版本管理与发布」:
创建版本
发布

然后在飞书里找到你刚创建的机器人,发送一条消息,它会自动回复一个配对码
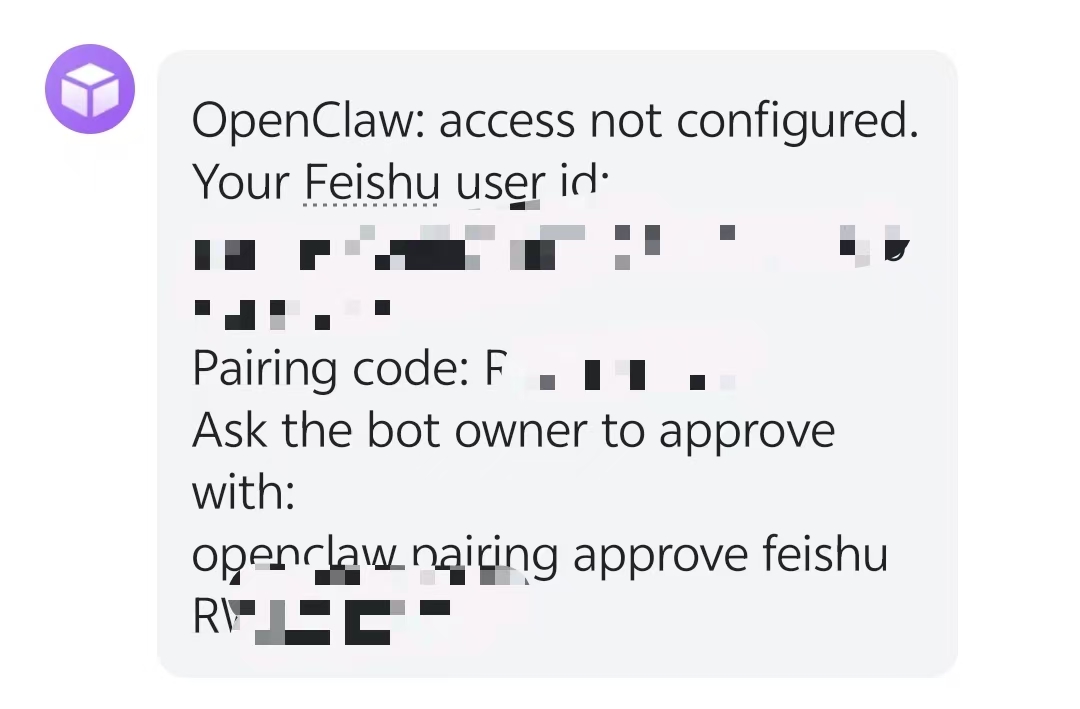
发送给OpenClaw,完成配置
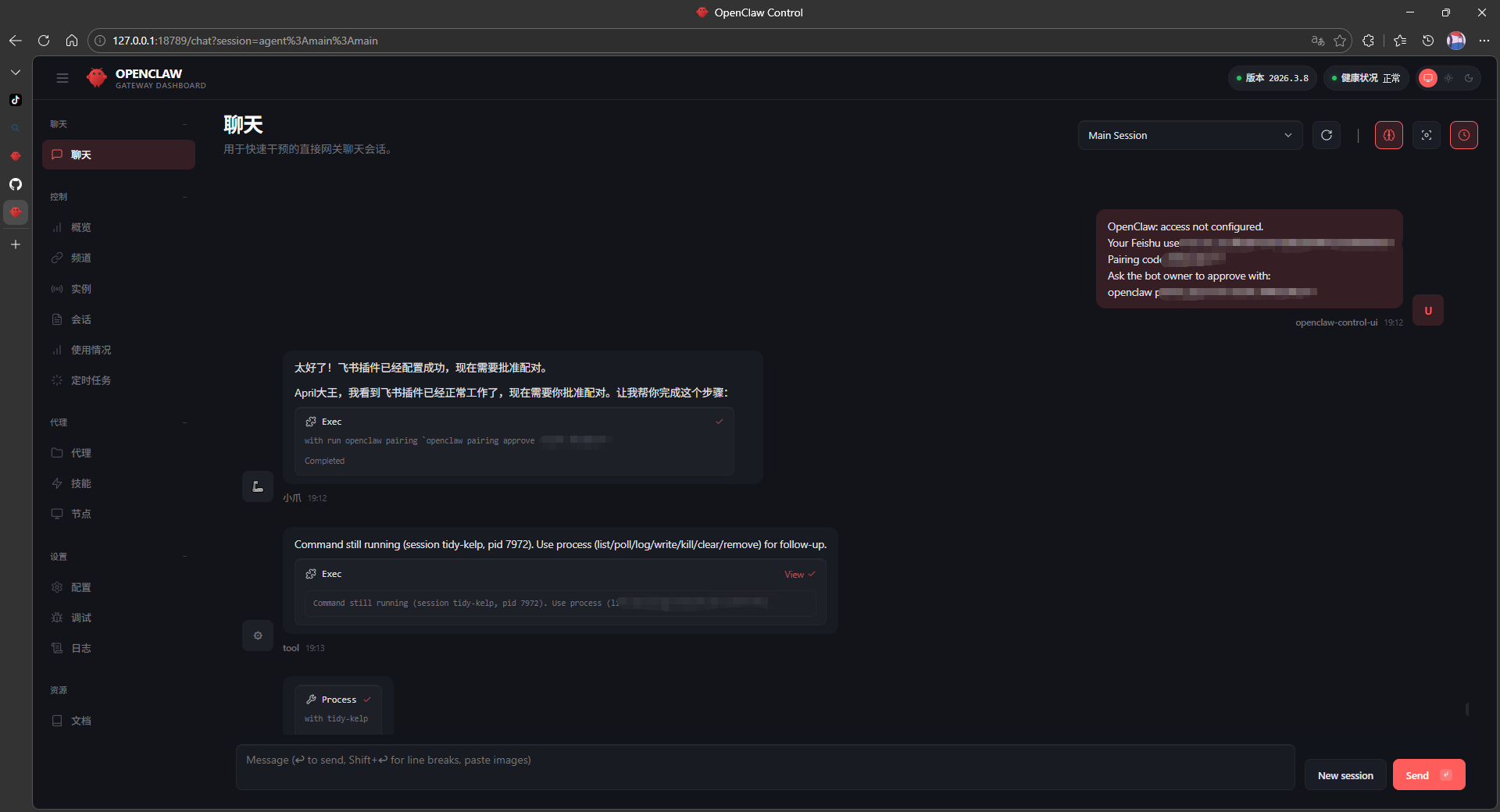
配置完成后,就可以通过飞书对话了
步骤4 常用命令
bash
# 启动网关
openclaw gateway start
# 重启网关(刷新机器人状态)
openclaw gateway restart
# 重置/更改 API 等配置
openclaw config
# 诊断检查
openclaw doctor
# 实时查看日志(强烈推荐:出 bug 基本都靠它定位)
openclaw logs follow完成安装