1. 功能概述
解码 h264/h265 视频或 jpg 图片,生成 yuv 图像。
1.1. 软件架构
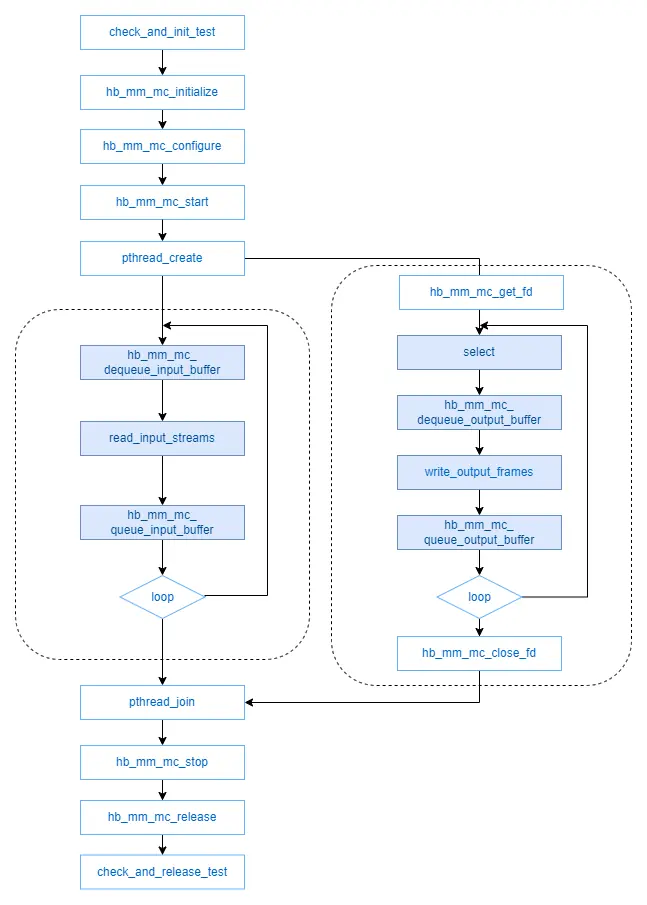
采用 MediaCodec 的 poll 模式来解耦输入和输出,可使解码帧率性能达到最优。 在主线程中灌码流数据:取出一个空的 input buffer,配置码流数据的地址信息(如 phys addr),再 queue input buffer 并通知解码器处理该帧数据; 另一个线程取输出 YUV 图像:通过 select 接收硬件解码完成通知,取出一个硬件填满输出图像的 output buffer,将解码结果写到文件中后归还 output buffer。
1.2. 硬件数据流说明

1.3. 代码位置及目录结构
sample 代码位置在工程目录{sdk_dir}/test/samples/platform_samples/source/S83_Sample/S83E04_Module/codec_sample。
目录结构如下:
Plain
.
├── codec_sample.sh
├── Kconfig
├── Makefile
├── Makefile.in
└── src
├── Makefile
├── sample.c
├── sample_common.c
├── sample.h根目录包含 Kconfig、codec_sample.sh 和外部接口的 makefile,Kconfig 用于控制该 demo 是否加入整体编译;codec_sample.sh 提供几种编解码执行脚本。
src 目录下的 makefile 用于 src 目录下的编译。src 目录下的 sample.c 是 main 入口的所在文件,sample_common 包含了一些共用的 api,sample_venc.c 包含编码相关函数,sample_vdec.c 包含解码相关函数。
2. 编译
2.1. 编译环境
本 sample 的编译环境使用 SDK 中的 build 工具,请参考: Build 环境建立 。
2.2. 编译说明
本 sample 主要依赖 libmm 提供的 API 头文件:
Plain
#include "hb_media_codec.h"
#include "hb_media_error.h"编译依赖的库有如下:
Plain
LIBS += -lpthread -ldl -lhbmem -lalog -lmultimedia
LIBS += -lavformat -lavcodec -lavutil -lswresample编译命令:
Plain
# 进入SDK所有目录{sdk_dir},并source构建环境(参见上)。
# 编译本sample:
bdm libmm-sample
# 输出文件:
{sdk_dir}/out/debug-gcc_{gcc_version}/build/test/samples/platform_samples/source/S83_Sample/S83E04_Module/codec_sample3. 运行
3.1. 支持平台
Matrix 6P/H
3.2. 板端部署及配置
刷写系统软件镜像后,本 sample 的可执行文件位于板端:/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/。
可能需要用到的资源:
- 执行脚本 codec_sample.sh 位于板端:/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/;
- 输入 H264、H265、JPG 文件可使用脚本或者用户自行准备。
3.3. 运行指南
3.3.1. 运行参数说明
codec_sample : 应用程序名字。
下面的表格是具体参数的说明:

3.3.2. 帮助菜单
Plain
Usage: ./codec_sample
-m --samplemode sample mode, default encoder, {0-encoder, 1-decoder}
-c --codecid codec id, default h264, {0-h264, 1-h265, 2-mjpeg, 3-jpeg}
-w --width width, default 3840
-h --height height, default 2160
-p --pixfmt pix fmt, default nv12, {0-yuv420p, 1-nv12, ..}
-n --threadnum test thread number, default 1
-i --inputfile input file name, default ./input_${w}x${h}_${pixfmt}.yuv
-o --outputfile output file name, default ./output_${w}x${h}_${pixfmt}.{code_type}
-u --core unit, default 03.3.3. 运行方法
输入源准备:
执行如下脚本,此脚本的作用是把测试用的源文件拷贝到/map/路径下,然后用-i 指定文件路径;
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/decoder_resoure_prepare.sh用户也可以不执行脚本,自行准备源文件,拷贝到/map/路径下,然后用-i 指定文件路径。
解码一路 3840x2160 的 h264 视频, 生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -m 1 -i /map/input_3840x2160_nv12.h264解码一路 1920x1080 的 h265 视频, 生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -m 1 -c 1 -w 1920 -h 1080 -i /map/input_1920x1080_nv12.h265解码一张 1920x1088 的 jpg 图片, 生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -m 1 -c 3 -w 1920 -h 1088 -i /map/input_1920x1088_nv12.jpg解码两路 3840x2160 的 h264 视频, 生成 yuv 图像。
Plain
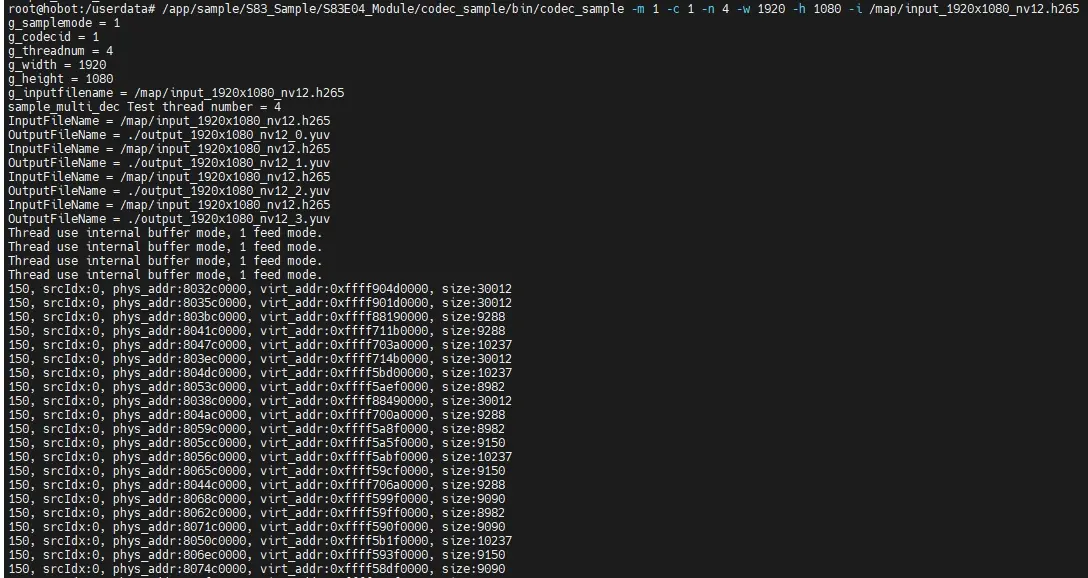
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -m 1 -n 2 -i /map/input_3840x2160_nv12.h264解码四路 1920x1080 的 h265 视频, 生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -m 1 -c 1 -n 4 -w 1920 -h 1080 -i /map/input_1920x1080_nv12.h265上面的命令默认跑 VPU 或者 JPU 硬件核 0,可通过-u 参数调整,加入-u 1 表示指定运行 VPU 核 1 或者 JPU 核 1,加入-u 2 表示指定运行 VPU 核 2 或者 JPU 核 2。
例如跑 VPU 核 1,解码一路 3840x2160 的 h264 视频,生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -u 1 -m 1 -i /map/input_3840x2160_nv12.h264例如跑 JPU 核 2,解码一张 1920x1088 的 jpg 图片,生成 yuv 图像。
Plain
/app/sample/S83_Sample/S83E04_Module/codec_sample/bin/codec_sample -u 2 -m 1 -c 3 -w 1920 -h 1088 -i /map/input_1920x1088_nv12.jpg3.3.4. 运行结果说明
如下图所示为运行成功:
使用 yuvplayer 查看生成的 yuv 图像文件是否正常:
