OpenCV(Open Source Computer Vision Library)作为计算机视觉领域最经典的开源库,凭借跨平台、高性能、易用性强的特性,成为开发者处理图像与视频的首选工具。本文将结合三个实战案例 ------ 视频椒盐噪声添加与平滑处理、摄像头实时边缘检测、图像轮廓提取与近似绘制,系统讲解 OpenCV 核心功能的应用逻辑与实现技巧,帮助读者从实战角度理解计算机视觉的基础原理。
一、OpenCV 基础认知
1.1 OpenCV 核心优势
OpenCV 基于 C/C++ 开发,提供 Python、Java 等多语言接口,覆盖图像读取 / 显示、像素操作、滤波处理、特征提取、视频分析等超 5000 个函数。其核心优势体现在:
- 实时性:针对图像处理做了深度优化,可满足摄像头实时流处理需求;
- 兼容性:支持 Windows、Linux、macOS 等系统,兼容各类图像 / 视频格式;
- 易用性:封装了复杂的算法逻辑,开发者无需深入底层即可实现核心功能。
1.2 核心数据结构
OpenCV 中最核心的是numpy.ndarray格式的图像矩阵:
- 彩色图像:三维矩阵
(高度, 宽度, 3),通道顺序为 BGR(而非常见的 RGB); - 灰度图像:二维矩阵
(高度, 宽度),像素值范围 0-255(0 为黑,255 为白); - 视频帧:本质是连续的图像矩阵,视频处理即对每一帧图像依次操作。
二、实战一:视频椒盐噪声添加与平滑处理
2.1 需求分析
给定视频文件test.avi,需实现:
- 为每一帧添加 10000 个随机黑白椒盐噪声;
- 采用平滑算法消除噪声,保留原画面清晰度;
- 同步展示原视频、含噪声视频、处理后视频。
2.2 核心实现逻辑
(1)椒盐噪声生成原理
椒盐噪声是图像中随机出现的黑白像素点(盐粒为白色 255,椒粒为黑色 0),生成逻辑为:
- 复制原帧避免修改原始数据;
- 随机生成 10000 个像素坐标;
- 对每个坐标随机赋值 0 或 255。
python
import cv2
import numpy as np
def add_peppersalt_noise(frame, n=10000):
"""添加椒盐噪声
Args:
frame: 输入帧(BGR格式)
n: 噪声点数量
Returns:
含噪声的帧
"""
result = frame.copy() # 复制原帧,避免修改原始数据
h, w = frame.shape[:2] # 获取帧的高度和宽度
for i in range(n):
# 随机生成像素坐标
x = np.random.randint(0, h)
y = np.random.randint(0, w)
# 随机生成黑白点
if np.random.randint(0, 2) == 0:
result[x, y] = 0 # 椒粒(黑色)
else:
result[x, y] = 255 # 盐粒(白色)
return result(2)噪声消除:中值滤波的选择
图像平滑算法有均值滤波、高斯滤波、中值滤波等,针对椒盐噪声,中值滤波是最优选择:
- 均值滤波:取邻域像素平均值,会模糊图像边缘;
- 高斯滤波:按高斯权重加权平均,对高斯噪声效果好,对椒盐噪声效果一般;
- 中值滤波:取邻域像素中值,能有效剔除极值噪声(椒盐点),同时保留边缘细节。
OpenCV 中cv2.medianBlur(src, ksize)实现中值滤波,ksize为滤波核大小(需为奇数,如 3、5),本例选择 3×3 核兼顾去噪与清晰度。
(3)视频读取与多窗口展示
python
# 读取视频文件
video = cv2.VideoCapture('test.avi')
if not video.isOpened():
print("无法打开视频文件!")
exit()
# 循环读取每一帧
while True:
ret, frame = video.read()
if not ret: # 帧读取失败(如视频结束)则退出循环
break
# 展示原视频
cv2.imshow('yuantu', frame)
# 添加椒盐噪声
noise_frame = add_peppersalt_noise(frame, n=10000)
cv2.imshow('noise', noise_frame)
# 中值滤波去噪
smooth_frame = cv2.medianBlur(noise_frame, 3)
cv2.imshow('medianBlur', smooth_frame)
# 按下ESC键(ASCII码27)退出,30ms/帧控制播放速度
if cv2.waitKey(30) == 27:
break
# 释放资源
video.release()
cv2.destroyAllWindows()运行结果:


2.3 关键注意事项
- cv2.VideoCapture:参数为视频路径时读取本地视频,为 0 时调用摄像头;
- cv2.waitKey():必须添加,否则窗口会卡死,参数为等待时间(ms);
- 帧复制:处理帧前需copy(),否则会直接修改原帧数据。
三、实战二:摄像头实时边缘检测
3.1 需求分析
调用摄像头实现:
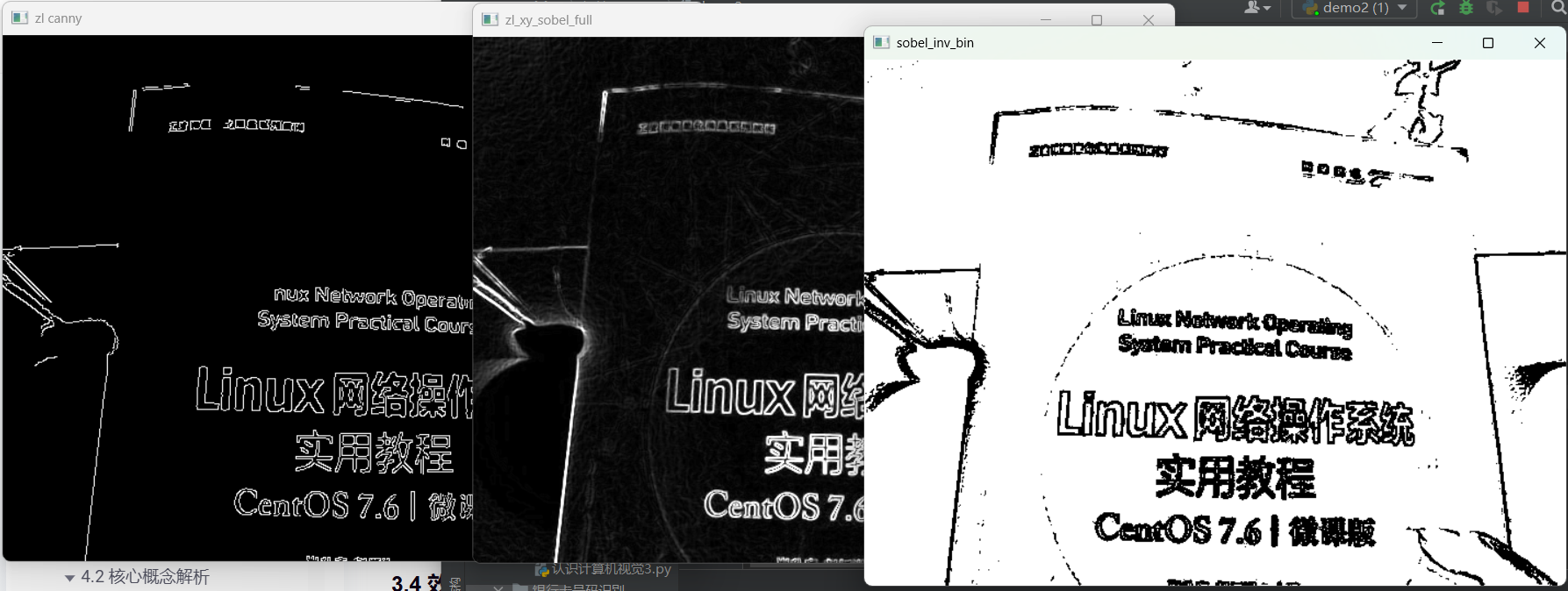
- 灰度转换 + CANNY 边缘检测(避免线段断开);
- 灰度图基础上的 Sobel 边缘检测 + 反向二值化(阈值 40,最大值 255);
- 同步展示 CANNY、Sobel、反向二值化后的 Sobel 画面。
3.2 核心算法解析
(1)CANNY 边缘检测
CANNY 是多阶段边缘检测算法,核心步骤:
- 灰度转换:简化计算;
- 高斯滤波:去噪;
- 计算梯度幅值和方向;
- 非极大值抑制:保留局部最大值,细化边缘;
- 双阈值检测:区分强边缘、弱边缘,仅保留强边缘及连接的弱边缘。
OpenCV 中cv2.Canny(img, minVal, maxVal),minVal和maxVal为双阈值,本例设置 50 和 150,避免线段断开。
(2)Sobel 边缘检测
Sobel 是基于梯度的边缘检测算法,通过卷积核计算 x、y 方向的梯度:
- dx=1, dy=0:检测水平边缘(x 方向梯度);
- dx=0, dy=1:检测垂直边缘(y 方向梯度)。
由于梯度可能为负,需用cv2.CV_64F格式存储,再通过cv2.convertScaleAbs()转换为绝对值,最后用cv2.addWeighted()融合 x、y 方向边缘。
(3)反向二值化
二值化是将图像转为黑白两色,反向二值化(cv2.THRESH_BINARY_INV)规则:
- 像素值 > 阈值(40):设为 0(黑);
- 像素值≤阈值(40):设为最大值(255,白)。
3.3 完整实现代码
python
import cv2
import numpy as np
# 调用摄像头(0为默认摄像头)
cap = cv2.VideoCapture(0)
if not cap.isOpened():
print("无法打开摄像头!")
exit()
while True:
# 读取摄像头帧
ret, frame = cap.read()
if not ret:
break
# 步骤1:灰度转换
gray_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# 步骤2:CANNY边缘检测(调整参数避免线段断开)
canny_edges = cv2.Canny(gray_frame, 50, 150)
# 步骤3:Sobel边缘检测
# x方向梯度(水平边缘)
sobel_x = cv2.Sobel(gray_frame, cv2.CV_64F, dx=1, dy=0)
sobel_x_abs = cv2.convertScaleAbs(sobel_x)
# y方向梯度(垂直边缘)
sobel_y = cv2.Sobel(gray_frame, cv2.CV_64F, dx=0, dy=1)
sobel_y_abs = cv2.convertScaleAbs(sobel_y)
# 融合x、y方向边缘
sobel_xy = cv2.addWeighted(sobel_x_abs, 1, sobel_y_abs, 1, 0)
# 步骤4:Sobel图像反向二值化
thresh = 40
maxval = 255
_, sobel_inv_bin = cv2.threshold(sobel_xy, thresh, maxval, cv2.THRESH_BINARY_INV)
# 展示窗口
cv2.imshow('zl canny', canny_edges)
cv2.imshow('zl_xy_sobel_full', sobel_xy)
cv2.imshow('sobel_inv_bin', sobel_inv_bin)
# 按下ESC键退出
if cv2.waitKey(1) == 27:
break
# 释放资源
cap.release()
cv2.destroyAllWindows()运行结果:
3.4 效果优化技巧
- CANNY 参数调整:minVal过小会出现大量伪边缘,过大则边缘断开,需根据实际场景微调;
- Sobel 核大小:默认 3×3,可通过ksize参数设置 5×5、7×7,增大核会检测更粗的边缘;
- 帧率控制:cv2.waitKey(1)保证实时性,1ms 等待时间适配摄像头帧率。
四、实战三:图像轮廓提取与近似绘制
4.1 需求分析
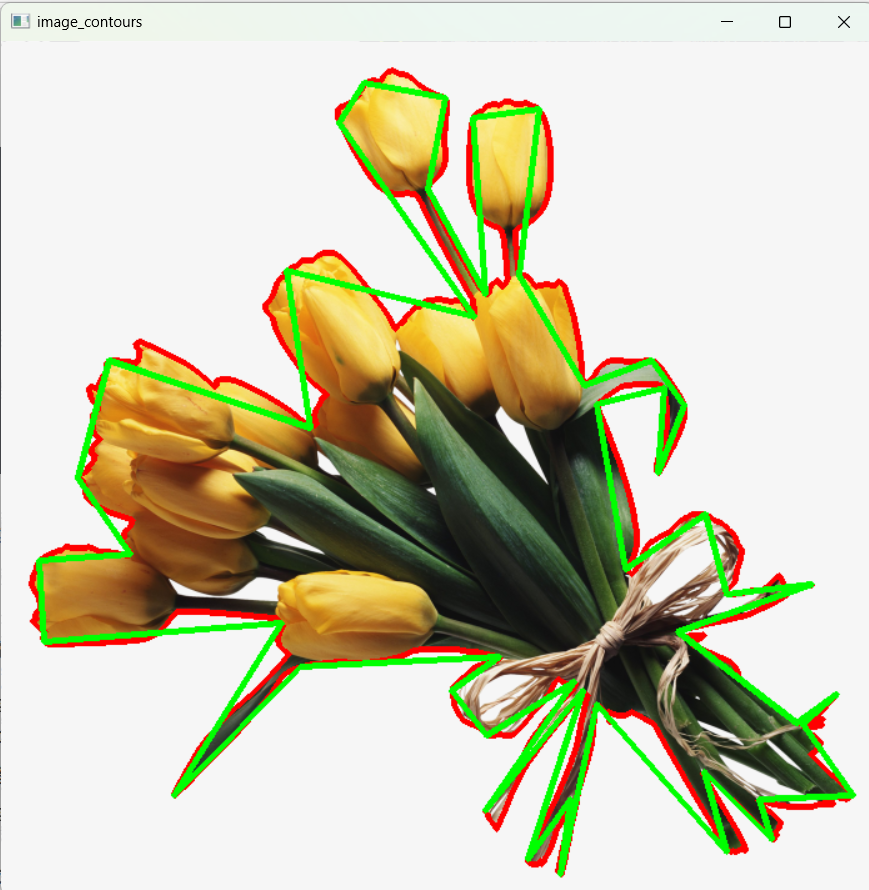
给定图片hua.png,在同一窗口实现:
- 红色绘制花的外部轮廓;
- 绿色绘制近似轮廓(ε= 轮廓周长 ×0.005)。
4.2 核心概念解析
(1)轮廓检测
轮廓是图像中连续的、相同像素值的边界,OpenCV 中轮廓检测步骤:
- 二值化:将图像转为黑白,突出目标轮廓;
- 轮廓查找:cv2.findContours()返回轮廓列表,每个轮廓为像素坐标数组;
- 轮廓筛选:通过面积过滤微小噪声轮廓。
(2)轮廓近似
轮廓近似(cv2.approxPolyDP())基于道格拉斯 - 普克算法,核心是用更少的点逼近原轮廓:
- epsilon:近似精度,越小越接近原轮廓;
- closed:是否闭合轮廓(True 表示闭合)。
本例中epsilon=0.005x周长,兼顾近似效果与轮廓简洁性。
4.3 完整实现代码
python
import cv2 # 读取的格式是BGR
import numpy as np
# 1. 读取图片
hua = cv2.imread('hua.png')
if hua is None:
print("错误:无法读取hua.png,请检查文件路径/名称是否正确!")
else:
# 2. 灰度转换 + 反向二值化(和你的参数完全一致)
hua_gray = cv2.cvtColor(hua, cv2.COLOR_BGR2GRAY)
ret, hua_thresh = cv2.threshold(hua_gray, 235, 255, cv2.THRESH_BINARY_INV)
contours_result = cv2.findContours(hua_thresh, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[-2]
contours = [cnt for cnt in contours_result if cv2.contourArea(cnt) > 10000]
for cnt in contours:
perimeter = cv2.arcLength(cnt, closed=True)
epsilon = 0.005 * perimeter
approx = cv2.approxPolyDP(cnt, epsilon, True)
print(cnt.shape)
print(approx.shape)
image_contours = hua.copy()
cv2.drawContours(image_contours, [cnt], contourIdx=-1, color=(0, 0, 255), thickness=3)
cv2.drawContours(image_contours, [approx], contourIdx=-1, color=(0, 255, 0), thickness=3)
cv2.imshow('image_contours', image_contours)
cv2.waitKey(0)
cv2.destroyAllWindows()运行结果:
4.4 关键细节说明
- 轮廓查找参数:cv2.RETR_EXTERNAL只提取最外层轮廓,适合检测物体外部边界;cv2.CHAIN_APPROX_SIMPLE压缩轮廓点(如矩形仅保留 4 个顶点),减少计算量;
- 颜色格式:OpenCV 中 BGR 格式,红色为
(0,0,255),绿色为(0,255,0),与 RGB 相反; - 轮廓筛选:通过cv2.contourArea()过滤小面积轮廓,避免噪声干扰。
五、OpenCV 实战核心总结
5.1 视频 / 图像处理通用流程
- 读取数据源:cv2.VideoCapture()(视频 / 摄像头)、cv2.imread()(图片);
- 预处理:灰度转换、二值化、噪声添加 / 消除;
- 核心处理:边缘检测、轮廓提取、滤波等;
- 结果展示:cv2.imshow();
- 资源释放:replease()、destroyAllWindows()。
5.2 常见问题与解决方案
- 窗口卡死:未添加cv2.waitKey(),需保证每个imshow()后有waitKey();
- 图像读取失败:路径错误或格式不支持,检查路径是否为绝对路径、文件是否损坏;
- 边缘检测效果差:调整 CANNY 双阈值或 Sobel 核大小,预处理时增加滤波步骤;
- 轮廓绘制错误:未筛选小轮廓,需通过cv2.contourArea()过滤噪声轮廓。
5.3 扩展应用场景
- 视频处理:监控视频去噪、运动目标检测;
- 边缘检测:车牌识别、人脸识别中的特征提取;
- 轮廓检测:物体计数、形状识别、图像分割。
六、总结
本文通过三个实战案例,系统讲解了 OpenCV 在视频噪声处理、实时边缘检测、图像轮廓提取中的核心应用。从基础的像素操作到复杂的边缘检测算法,从单帧图片处理到视频流实时分析,覆盖了 OpenCV 最常用的功能模块。掌握这些基础技能后,可进一步探索 OpenCV 的高级功能(如特征匹配、目标跟踪、深度学习推理),结合实际场景实现更复杂的计算机视觉应用。
OpenCV 的学习核心在于 "实战"------ 通过不断调试参数、修改代码,理解每个函数的作用与原理,才能真正掌握其精髓。希望本文的案例与解析能帮助读者快速入门 OpenCV,为后续的计算机视觉学习打下坚实基础。