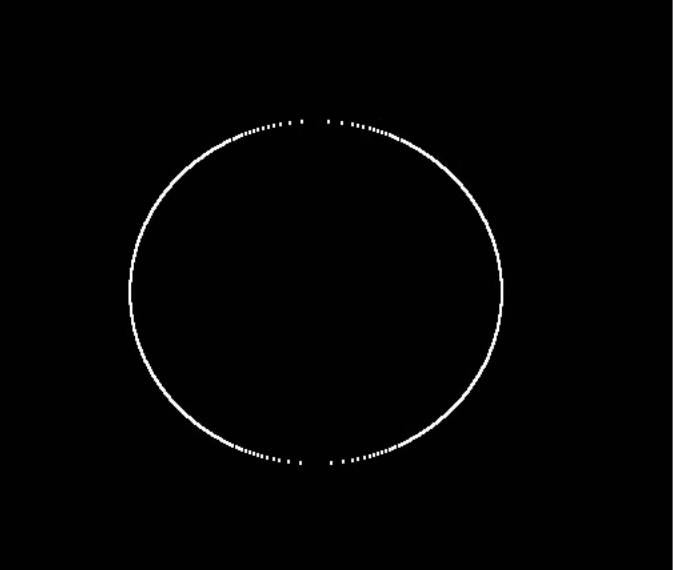
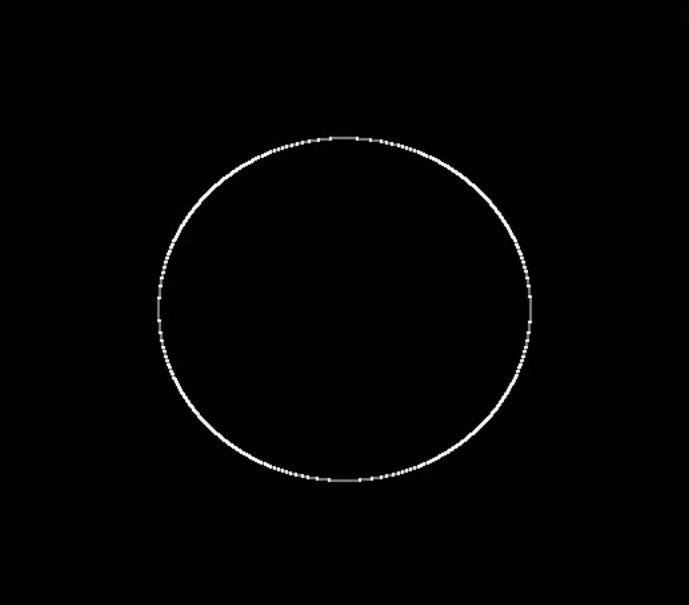
1.Canny边缘检测
1)使用高斯滤波器,以平滑图像,滤除噪声。
2)用sobel算子计算图像中每个像素点的梯度强度和方向。
3)应用非极大值(Non-Maximum Suppression)抑制,以消除边缘检测带来的杂散响应。
4)应用双阈值(Double-Threshold)检测来确定真实的和潜在的边缘。
5)通过抑制孤立的弱边缘最终完成边缘检测。
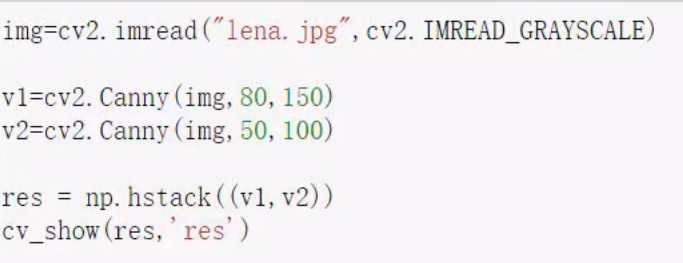

设置的阈值越大,保留细节越少
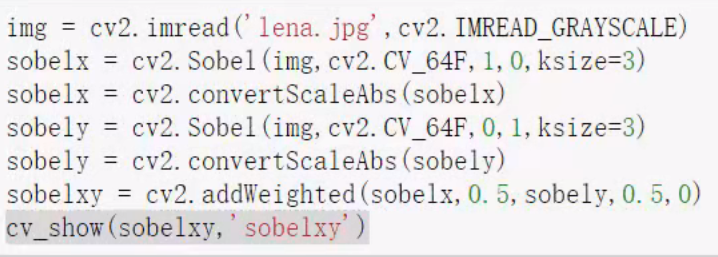
2.sobel算子

cv2.Sobel(src,ddepth图像深度,dx水平方向,dy竖直方向,ksize算子大小)

表示只算竖直,谁是1就算谁
白-黑是正数,黑-白是负数,所有负数被截断成0,所以需要加绝对值
cv2.addWeighted(sobelx,权重,sobely,权重,偏置项一般为0)
分开计算再融合效果比整体计算更好

3.Scharr算子

Iaplacian算子
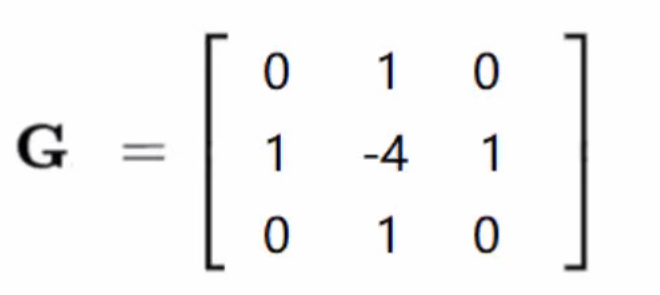
对噪音点敏感
sobel scharr Iaplacian

1.图像金字塔:
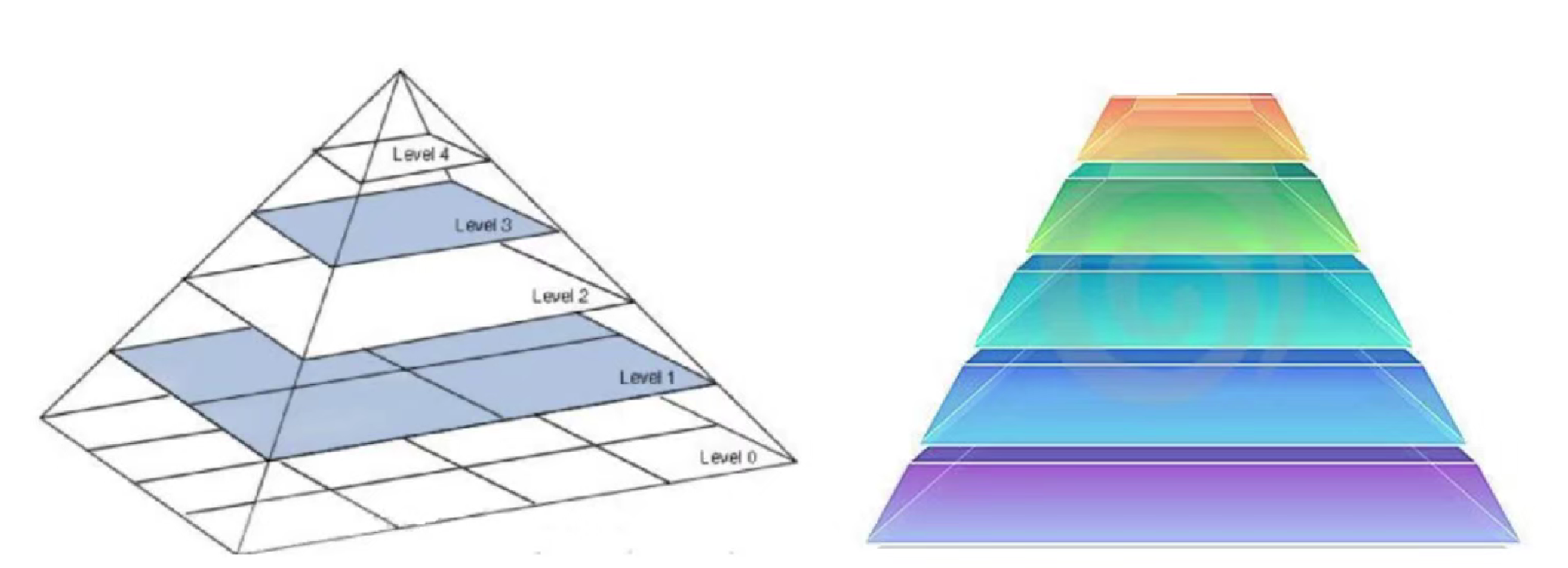
高斯金字塔:向下采样方法(缩小)
将Gi与高斯内核卷积
将所有偶数行和列去除
高斯金字塔:向上采用方法(放大)
将图像在每个方向扩大为原来的两倍,新增的行和列以0填充
使用先前同样的内核与放大后的图像卷积,获得近似值
2.金字塔制作方法
cv2.pryUp(图像) shape变大
cv2.pryDown(图像) shape变小
3.拉普拉斯金字塔

4.图像轮廓
cv2.findContours(img,mode,method)
mode:轮廓检索模式
RETR_EXTERNAL:只检索最外面的轮廓;
RETR_LIST:检索所有的轮廓,并将其保存到一条链表当中;
RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次;(常用)
method:轮廓逼近方法
CHAIN_APPROX_NONE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
为了更高的准确率, 一般用二值图像


第一个值是原图,第二个图是轮廓点,第三个是层级
绘制轮廓:cv2.drawContours(图像,轮廓点,第几个轮廓 默认-1为所有轮廓,(B,G,R颜色),线条宽度) 会覆盖源文件

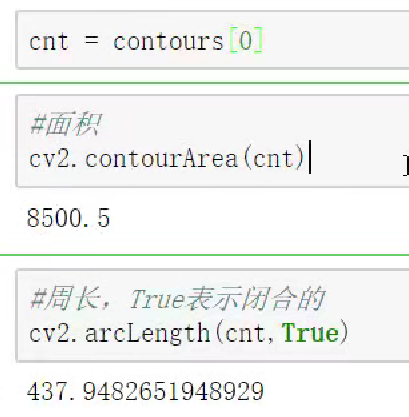
5.轮廓特征计算
6.轮廓近似

binary,contours,hierarchy=cv2.findContours(灰度图,cv2.RETR_TREE,cv2.CHAIN_APPROX_NONE)
cnt=contours0
approx=cv2.approxPolyDP(cnt,epsilon,True) 近似函数
res=cv2.drawContours(img,approx,-1,(0,0,255),2)
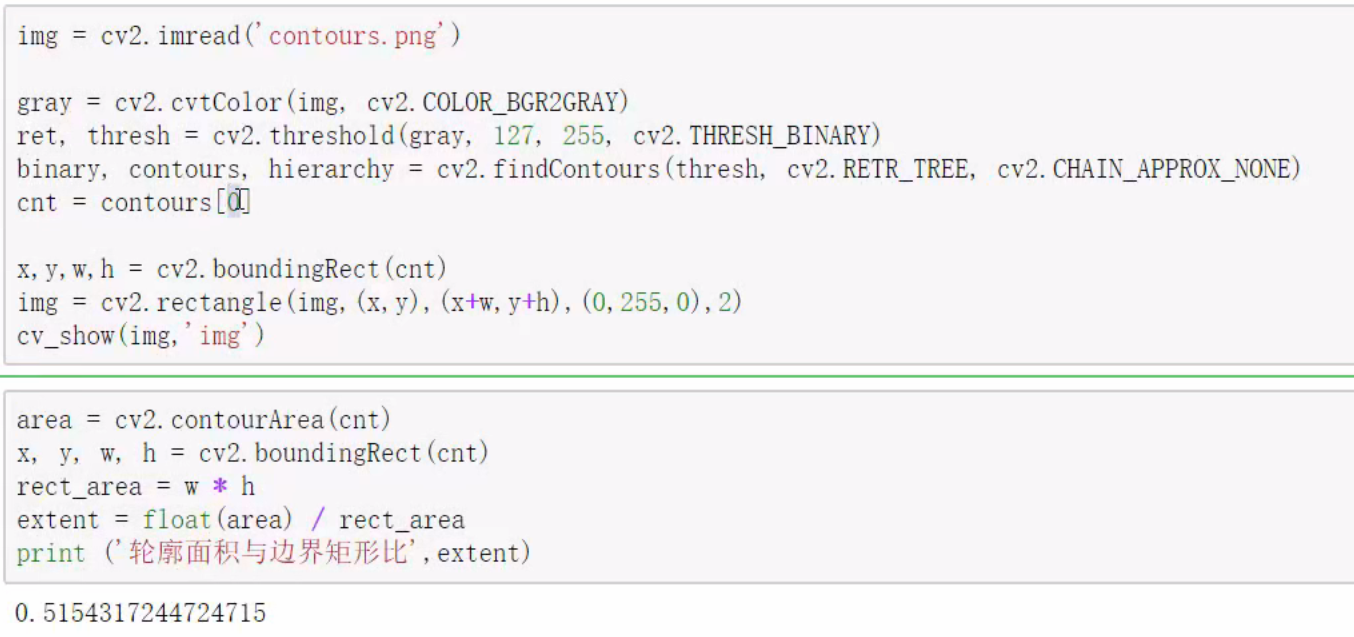
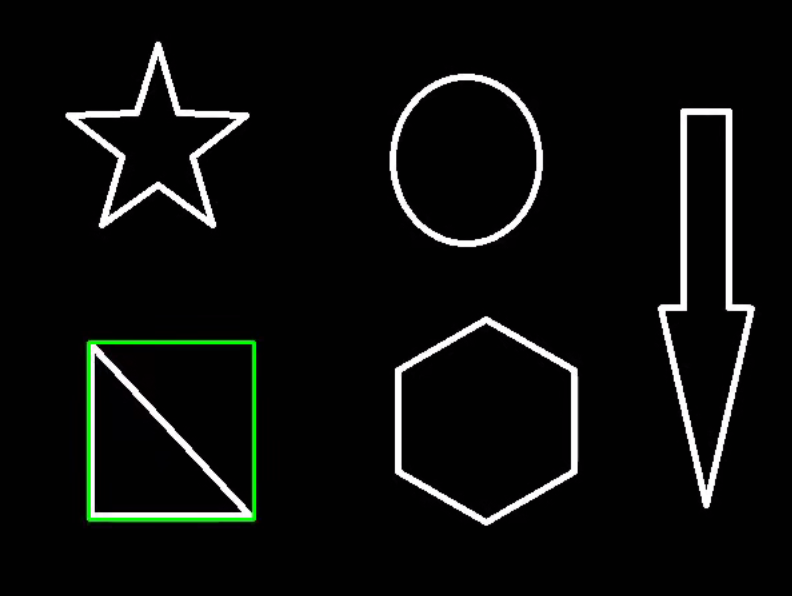
7.边界矩形
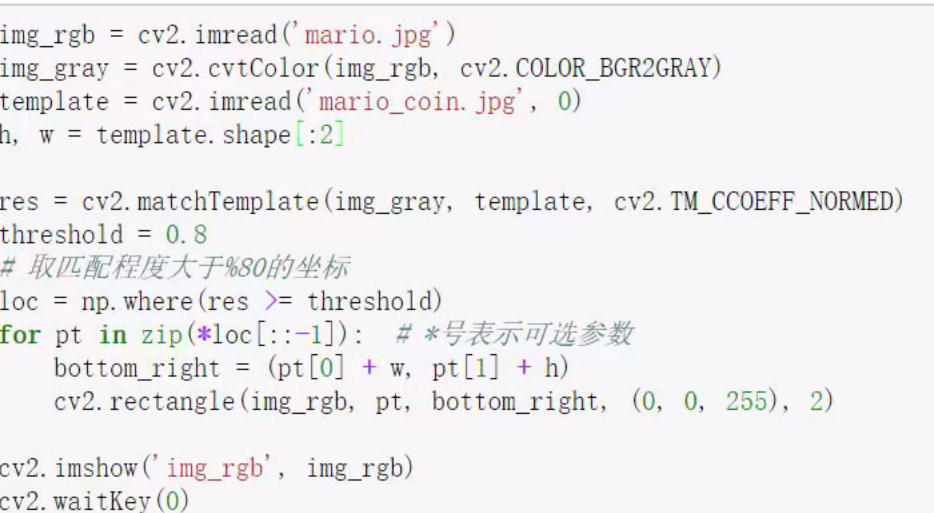
8.模板匹配
模板匹配和卷积原理很像,模板在原图像上从原点开始滑动,计算模板与(图像被模板覆盖的地方)的差别程度,这个差别程度的计算方法在opencv里有6种,然后将每次计算的结果放入一个矩阵里,作为结果输出。假如原图形是AxB大小,而模板是axb大小,则输出结果的矩阵是(A-a+1)x(B-b+1)
TM_SQDIFF:计算平方不同,计算出来的值越小,越相关
TM_CCORR:计算相关性,计算出来的值越大,越相关
TM_CCOEFF:计算相关系数,计算出来的值越大,越相关
TM_SQDIFF_NORMED:计算归一化平方不同,计算出来的值越接近0,越相关
TM_CCORR_NORMED:计算归一化相关性,计算出来的值越接近1,越相关
TM_CCOEFF_NORMED:计算归一化相关系数,计算出来的值越接近1,越相关
cv2.matchTemplate(img,template,cv2.TMSQDIFF)
匹配多个对象
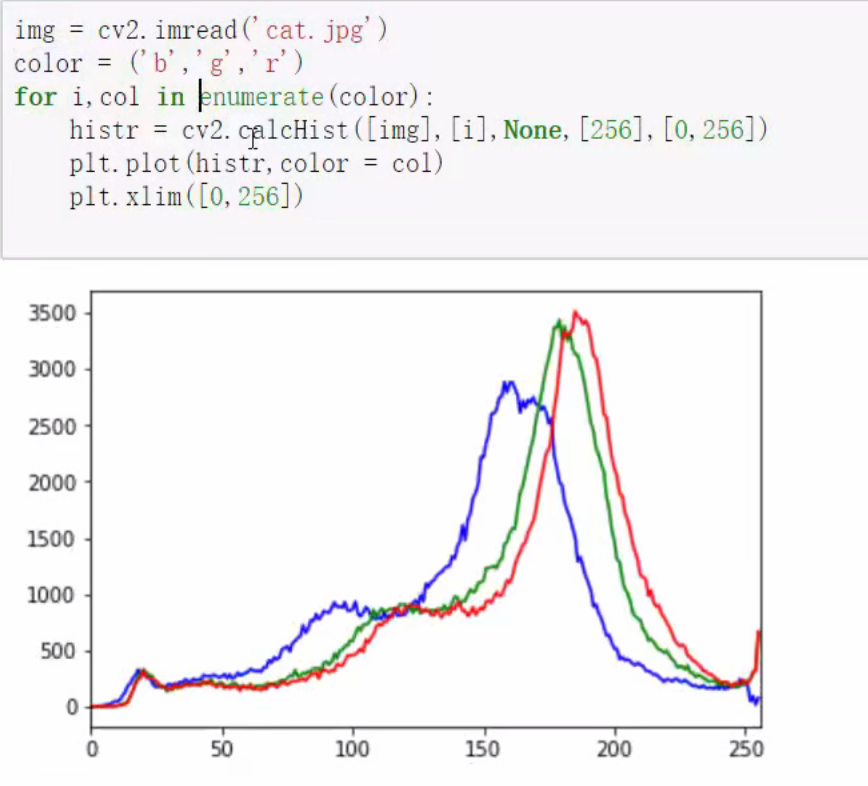
9.直方图
cv2.calcHist(images,channels,mask,histSize,ranges)
images: 原图像图像格式为 uint8 或 float32。当传入函数时应 用中括号 \[\] 括来例如img
channels: 同样用中括号括来它会告函数我们统幅图 像的直方图。如果入图像是灰度图它的值就是 0如果是彩色图像 的传入的参数可以是 012 它们分别对应着 BGR。
mask: 掩码图像。统整幅图像的直方图就把它为 None。但是如 果你想统图像某一分的直方图的你就制作一个掩模图像并 使用它。
histSize:BIN 的数目。也应用中括号括来
ranges: 像素值范围常为 0,256
10.均衡化:
cv2.equalizeHist(img)
自适应均衡化:cv2.createCLAHE(clipLimit=2.0,tileGridSize=(8,8))

11.傅里叶变换
作用:高频:变化剧烈地灰度分量,比如边界
低频:变化缓慢的灰度分量,例如一片大海
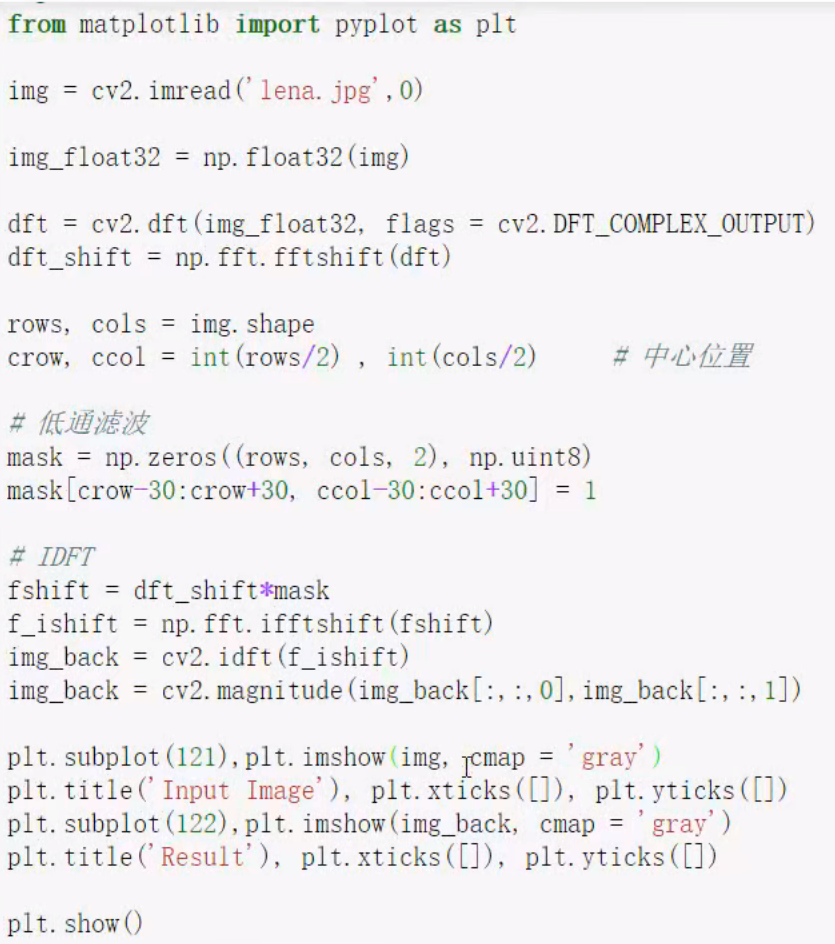
滤波:低通滤波器:只保留低频,会使图像模糊
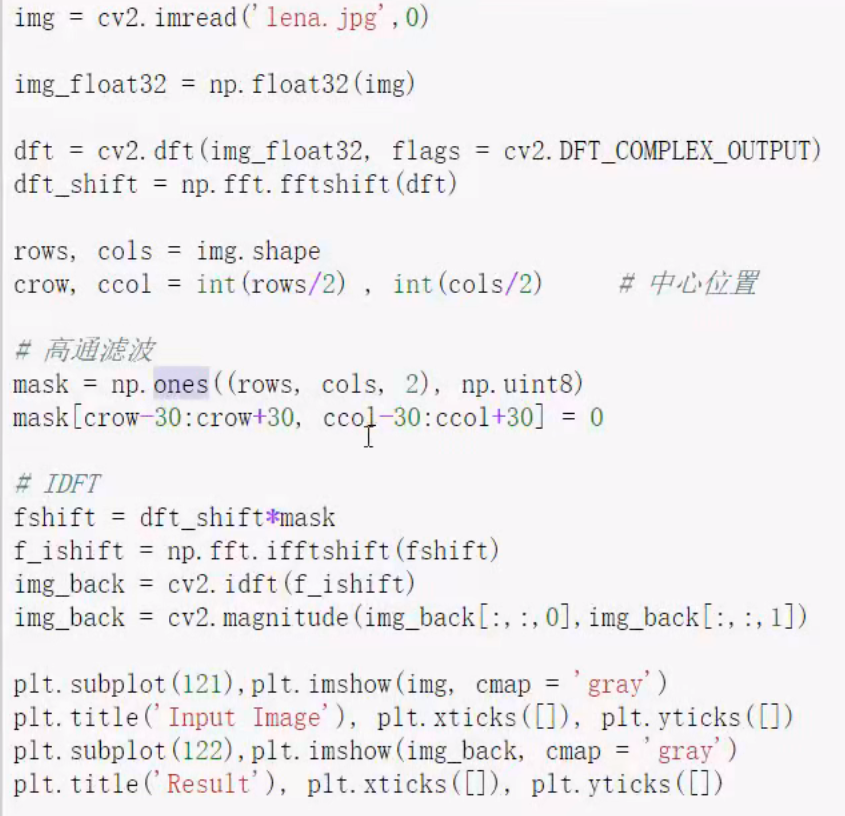
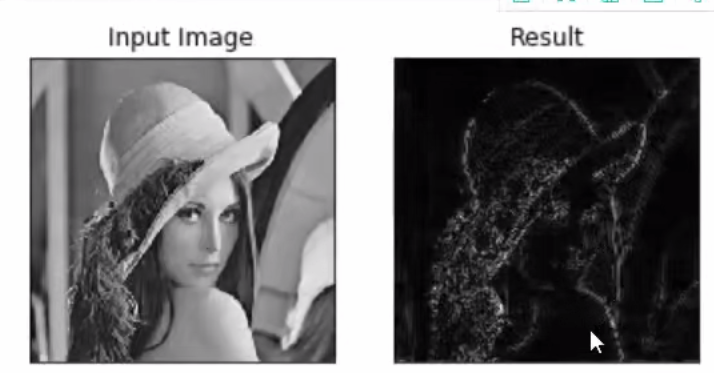
高通滤波器:只保留高频,会使图像细节增加
在opencv中主要是cv2.dft()和cv2.idft(),输入图像要先转换成np.float32格式,得到的结果中频率为0的部分会在左上角,通常要转换到中心位置,可以通过shift变换来实现。cv2.dft()返回的结果是双通道的(实部,虚部),通常还需要转换成图像格式才能展示(0,255)

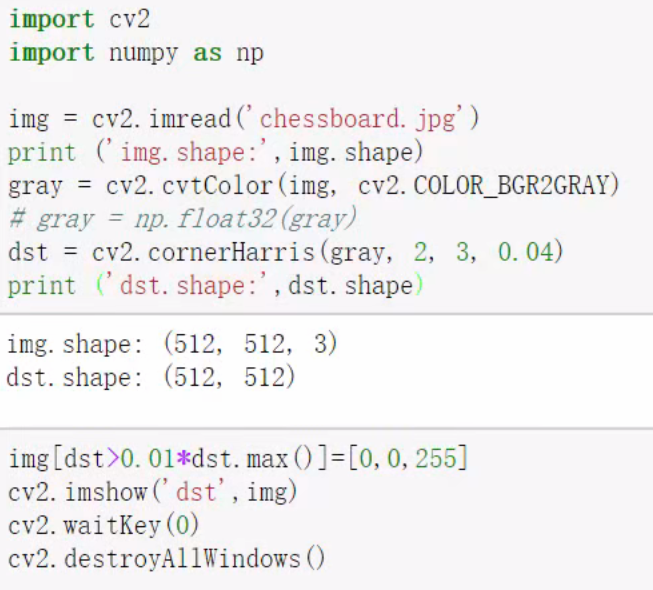
12.角点检测:
cv2.cornerHarris(img,blockSize指定区域大小,ksize,k取值参数为0.04 0.06)