1.安装miniforge/ Miniconda
bash
wget https://repo.anaconda.com/miniconda/Miniconda3-latest-Linux-aarch64.sh
chmod +x Miniconda3-latest-Linux-aarch64.sh
./Miniconda3-latest-Linux-aarch64.sh
source ~/.bashrc或者安装miniforge(二选一即可)这个更支持jetson的arm64架构
bash
wget "https://github.com/conda-forge/miniforge/releases/latest/download/Miniforge3-$(uname)-$(uname -m).sh"
bash Miniforge3-$(uname)-$(uname -m).sh2. 创建并激活一个新的 conda 环境用于 lerobot
由于jetson的torch只能支持到python=3.10;所以这里不安装官网推荐的3.12以上
bash
conda create -y -n lerobot python=3.10
conda activate lerobot3. 安装ffmpeg
注意官方文档写得暂时不支持8.x及以上
bash
conda install ffmpeg=7.1.1 -c conda-forge
ffmpeg -version # ffmpeg 8.X is not yet supported !4. 克隆 Lerobot 仓库
bash
git clone https://github.com/huggingface/lerobot.git
cd lerobot5. 安装带有 feetech 电机依赖的 LeRobot:
包含 feetech 额外依赖
bash
pip install -e ".[feetech]"6. 执行此步前,确认已经安装了jetpack
由于Jetson对于opencv,numpy等有自己的版本要求,所以重新
bash
# 重新安装opencv
conda install -y -c conda-forge "opencv>=4.10.0.84" # 通过 conda 安装 OpenCV 和其他依赖,仅适用于 Jetson Jetpack 6.0+
conda remove opencv # 卸载 OpenCV,这里主要是为了留依赖项
pip3 install opencv-python==4.10.0.84 # 使用 pip3 安装指定版本 OpenCV
# 重新安装numpy
pip uninstall numpy
pip3 install numpy==1.26.0 # 该版本需与 torchvision 兼容7. 重新安装Pytorch 和 Torchvision
7.0 删除原来的torch和torchvision
bash
pip uninstall torch torchvision7.1 查看JetPack版本
bash
cat /etc/nv_tegra_release这里的R36 在后面选择torch和torchvision版本会用到
7.2 确保系统包是最新的
bash
sudo apt update
sudo apt upgrade -y
sudo apt autoremove -y7.3 (可跳过)安装(必要)依赖
具体到底哪些有用哪些没用我也不知道,也可以先不装,等有问题了再回过头来装
bash
# 1. 安装 mamba(更快的包管理器,可选但推荐)
conda install mamba -y
# 2. 使用 mamba 安装 Pinocchio 及其 Python 绑定
# Pinocchio 是用于机器人动力学计算的高效库,常用于仿真与控制
mamba install -c conda-forge pinocchio pinocchio-python -y
# 3. 安装 PyTorch 所需的系统级依赖(用于 GPU 加速和并行计算)
# - libopenblas-base: 高性能线性代数库
# - libopenmpi-dev / libomp-dev: 并行计算支持(MPI 和 OpenMP)
sudo apt-get update # 先更新包列表,确保能获取最新版本
sudo apt-get install -y python3-pip python3-dev libopenblas-base \
libopenmpi-dev libomp-dev
# 4. 安装 TorchVision 及其他图像/视频处理所需的底层库
# 这些库用于处理摄像头数据、视频编码解码等任务
sudo apt-get install -y libjpeg-dev zlib1g-dev libpython3-dev \
libavcodec-dev libavformat-dev libswscale-dev7.4 安装torch和torchvison
官网下载链接,这里建议开梯子,不然非常慢:https://forums.developer.nvidia.com/t/pytorch-for-jetson/72048
选择对应版本,下载whl后pip install即可,torch和torchvision都是
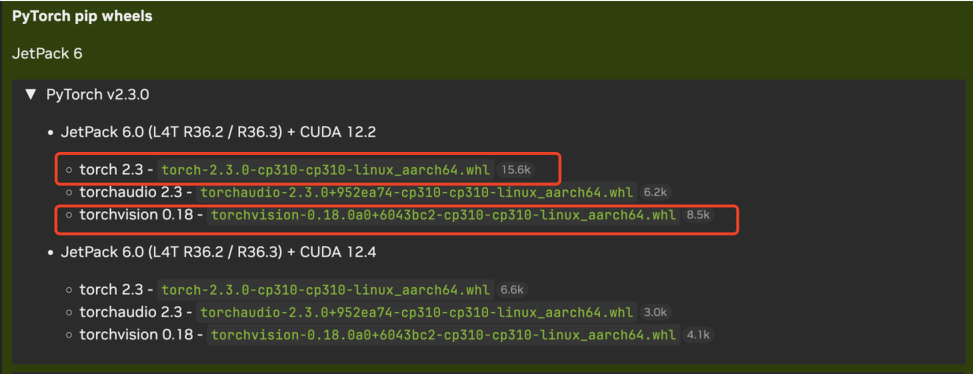
bash
cd [到你下载的包的文件夹下]
pip install torch-2.3.0-cp310-cp310-linux_aarch64.whl
pip install torchvision-0.18.0a0+6043bc2-cp310-cp310-linux_aarch64.whl7.5 验证CUDA和torch和torchvision
python -c "import torch; print(torch.cuda.is_available())"
python -c "import torchvision; print(torchvision.__version__)"现在环境就配置好了!
常见问题解决方案
Jetson设备内存有限,编译时可能出现内存不足的问题; 增加交换空间相当于在硬盘上划出一块区域(这里是4G)当临时内存用,能有效避免这个问题。如果你的板子还没设置过,可以这么操作:
bash
# 创建交换空间
sudo fallocate -l 4G /swapfile
sudo chmod 600 /swapfile
sudo mkswap /swapfile
sudo swapon /swapfile
# 永久添加交换空间(可选)
echo '/swapfile none swap sw 0 0' | sudo tee -a /etc/fstab