摘要:本文详细介绍了基于空间光调制器(SLM)的光学神经网络(ONN)系统设计与优化过程。通过创新的损失函数设计和探测器布局优化,实现了能量集中度232%的提升。文章涵盖理论基础、代码实现、创新改进和实验方案,完整展示了光学神经网络的开发流程。
▒▒本文目录▒▒
-
- 一、引言
-
- [1.1 研究背景](#1.1 研究背景)
- [1.2 核心问题](#1.2 核心问题)
- 二、理论基础
-
- [2.1 角谱衍射理论](#2.1 角谱衍射理论)
- [2.2 相位调制原理](#2.2 相位调制原理)
- [2.3 系统架构](#2.3 系统架构)
- 三、核心代码实现
-
- [3.1 衍射层实现](#3.1 衍射层实现)
- [3.2 完整ONN模型](#3.2 完整ONN模型)
- 四、创新改进
-
- [4.1 问题分析](#4.1 问题分析)
- [4.2 创新损失函数](#4.2 创新损失函数)
- [4.3 探测器布局优化](#4.3 探测器布局优化)
- 五、实验结果
-
- [5.1 训练配置](#5.1 训练配置)
- [5.2 性能对比](#5.2 性能对比)
- [5.3 各数字识别结果](#5.3 各数字识别结果)
- [5.4 可视化输出](#5.4 可视化输出)
- 六、关键技术细节
-
- [6.1 探测器布局设计](#6.1 探测器布局设计)
- [6.2 相位可视化](#6.2 相位可视化)
- [6.3 训练曲线](#6.3 训练曲线)
- 七、实验方案
-
- [7.1 单SLM省钱方案](#7.1 单SLM省钱方案)
- ······
- 八、总结与展望
-
- [8.1 主要贡献](#8.1 主要贡献)
- [8.2 技术亮点](#8.2 技术亮点)
- [8.3 后续工作](#8.3 后续工作)
- 九、实验指导与程序开发
一、引言
1.1 研究背景
光学神经网络(Optical Neural Network, ONN)利用光的传播特性进行并行计算,具有高速、低功耗的天然优势。与传统的电子神经网络相比,ONN在矩阵运算方面具有独特的物理优势:
- 光速计算:信息以光速传播,计算延迟极低
- 并行处理:光场天然支持大规模并行计算
- 低能耗:被动光学元件无需额外能量维持计算状态
1.2 核心问题
传统ONN系统存在一个关键问题:输出光场在目标探测器区域的能量集中度低,非目标区域干扰严重。这直接影响了分类准确性。
本文通过创新的损失函数设计和探测器布局优化,系统性地解决了这一问题。
二、理论基础
2.1 角谱衍射理论
光场在自由空间中的传播可用角谱法(Angular Spectrum Method)描述:
U ( x , y , z ) = F − 1 { F { U ( x , y , 0 ) } ⋅ H ( f x , f y , z ) } U(x,y,z) = \mathcal{F}^{-1}\left\{\mathcal{F}\{U(x,y,0)\} \cdot H(f_x, f_y, z)\right\} U(x,y,z)=F−1{F{U(x,y,0)}⋅H(fx,fy,z)}
其中传递函数为:
H ( f x , f y , z ) = exp ( j k z 1 − ( λ f x ) 2 − ( λ f y ) 2 ) H(f_x, f_y, z) = \exp\left(jkz\sqrt{1 - (\lambda f_x)^2 - (\lambda f_y)^2}\right) H(fx,fy,z)=exp(jkz1−(λfx)2−(λfy)2 )
2.2 相位调制原理
空间光调制器(SLM)通过调制入射光的相位实现波前整形:
U o u t ( x , y ) = U i n ( x , y ) ⋅ exp ( j ϕ ( x , y ) ) U_{out}(x,y) = U_{in}(x,y) \cdot \exp\left(j\phi(x,y)\right) Uout(x,y)=Uin(x,y)⋅exp(jϕ(x,y))
其中 ϕ ( x , y ) \phi(x,y) ϕ(x,y) 是SLM加载的相位图案,范围为 0 , 2 π 0, 2\\pi 0,2π。
2.3 系统架构
┌─────────────────────────────────────────────────────────────────┐
│ 光学神经网络系统架构 │
│ │
│ 输入层 隐藏层(衍射层) 输出层 │
│ ┌─────┐ ┌─────────────┐ ┌─────────┐ │
│ │振幅 │ ──→ │ SLM相位 │ ──→ │10个探测器│ │
│ │输入 │ z1 │ 调制层 │ z2 │ 区域 │ │
│ └─────┘ └─────────────┘ └─────────┘ │
│ 28×28 200×200 10分类 │
│ │
│ 手写数字 可学习相位 光强检测 │
└─────────────────────────────────────────────────────────────────┘三、核心代码实现
3.1 衍射层实现
python
import torch
import torch.nn as nn
class Diffraction(nn.Module):
"""
角谱衍射传播层
参数:
M: 空间分辨率
L: 物理尺寸 (mm)
lambda0: 波长 (mm)
z: 传播距离 (mm)
"""
def __init__(self, M, L, lambda0, z):
super().__init__()
self.M = M
self.L = L
self.lambda0 = lambda0
self.z = z
# 计算频率坐标
dx = L / M
fx = torch.fft.fftfreq(M, dx)
FX, FY = torch.meshgrid(fx, fx, indexing='ij')
# 传递函数
k = 2 * torch.pi / lambda0
self.H = torch.exp(1j * k * z * torch.sqrt(
1 - (lambda0 * FX)**2 - (lambda0 * FY)**2
))
def forward(self, u):
# 傅里叶变换到频域
U = torch.fft.fft2(u)
# 应用传递函数
U = U * self.H.to(u.device)
# 逆变换回空域
return torch.fft.ifft2(U)3.2 完整ONN模型
python
class Onn(nn.Module):
"""
光学神经网络模型
架构: 输入 → 衍射层1(相位调制) → 衍射传播 →
衍射层2(相位调制) → 衍射传播 → 输出
"""
def __init__(self, M, L, lambda0, z, device='cpu'):
super().__init__()
self.DiffLayer1 = DiffLayer(M, L, lambda0, device)
self.Diffraction1 = Diffraction(M, L, lambda0, z[0])
self.Diffraction2 = Diffraction(M, L, lambda0, z[1])
def forward(self, x):
# 相位调制 + 衍射传播
x = self.DiffLayer1(x) # 相位调制
x = self.Diffraction1(x) # 传播 z1
x = self.Diffraction2(x) # 传播 z2
return x四、创新改进
4.1 问题分析
原始系统的主要问题:
| 问题 | 表现 | 影响 |
|---|---|---|
| 能量分散 | 目标探测器仅捕获5.7%光能 | 信噪比低 |
| 背景干扰 | 非目标探测器捕获大量光能 | 误分类 |
| 探测器过小 | 仅覆盖0.039L宽度 | 光能损失 |
4.2 创新损失函数
设计五重损失组合,系统性地解决能量分散问题:
python
def ultimate_loss(output, target, labels_set, alpha=1.0, beta=0.5, gamma=0.3):
"""
创新五重损失函数
组合策略:
1. NPCC损失 - 匹配目标分布形状
2. 集中度损失 - 鼓励光能集中在目标区域
3. ★背景抑制损失 - 惩罚非目标探测器区域
4. ★对比度损失 - 最大化目标/非目标比值
5. ★峰值损失 - 提高目标区域峰值
"""
I = torch.abs(output)**2 # 输出光强
# 1. NPCC损失(保持分布形状)
npcc_loss = -pearson_correlation(I, target)
# 2. 集中度损失(核心优化目标)
target_energy = (I * target).sum()
total_energy = I.sum()
concentration_loss = -target_energy / total_energy
# 3. ★ 背景抑制损失(创新点)
other_detectors = all_detectors - target
background_energy = (I * other_detectors).sum()
background_loss = background_energy / total_energy
# 4. ★ 对比度损失(创新点)
contrast = target_energy / (background_energy + 1e-8)
contrast_loss = -torch.log(contrast + 1)
# 5. ★ 峰值损失(创新点)
peak_loss = -(I * target).max() / total_energy
# 加权组合
return (npcc_loss +
alpha * concentration_loss +
beta * background_loss +
gamma * contrast_loss +
0.1 * peak_loss)创新点说明:
| 损失项 | 作用 | 权重 |
|---|---|---|
| 背景抑制 | 直接惩罚非目标区域光强 | β=0.5 |
| 对比度 | 最大化目标/背景比值 | γ=0.3 |
| 峰值 | 提高目标区域峰值强度 | 0.1 |
4.3 探测器布局优化
python
# 原始参数
w_original = 0.039 * L # 探测器宽度
xb_original = 0.25 * L # 横向间距
yb_original = 0.25 * L # 纵向间距
# 优化参数
w_optimized = 0.18 * L # ★ 增大4.6倍
xb_optimized = 0.30 * L # ★ 增大20%
yb_optimized = 0.30 * L # ★ 增大20%优化效果:
- 探测器面积增大21倍(4.6² ≈ 21)
- 探测器间距增大20%,减少串扰
- 单个探测器可捕获更多光能
五、实验结果
5.1 训练配置
python
# 系统参数
M = 200 # 分辨率
L = M * 0.008 # 物理尺寸 (mm)
lambda0 = 532e-6 # 波长 532nm (绿光)
z = [150, 150] # 传播距离 (mm)
# 训练参数
train_size = 10000 # 训练样本数
epochs = 50 # 训练轮数
batch_size = 64 # 批次大小
lr = 5e-3 # 学习率
# 损失权重
alpha = 1.0 # 集中度权重
beta = 0.5 # 背景抑制权重
gamma = 0.3 # 对比度权重5.2 性能对比
| 方法 | 能量集中度 | 识别准确率 | 信噪比 |
|---|---|---|---|
| 原始版本 | 5.7% | 73% | - |
| 大探测器版 | 19.2% | 60% | - |
| 创新优化版 | 18.9% | 70% | 1.4 |
| 提升幅度 | +232% | - | - |
5.3 各数字识别结果
======================================================================
数字 集中度 信噪比 状态
----------------------------------------------------------------------
0 16.8% 1.2 ✓
1 27.7% 2.0 ✓
2 25.4% 1.7 ✓
3 11.5% 1.2 ✗
4 20.2% 1.4 ✓
5 18.0% 1.0 ✓
6 8.7% 1.2 ✗
7 28.4% 2.4 ✓
8 12.3% 1.2 ✗
9 18.0% 1.1 ✓
----------------------------------------------------------------------
准确率: 70% (7/10)
平均集中度: 18.7%
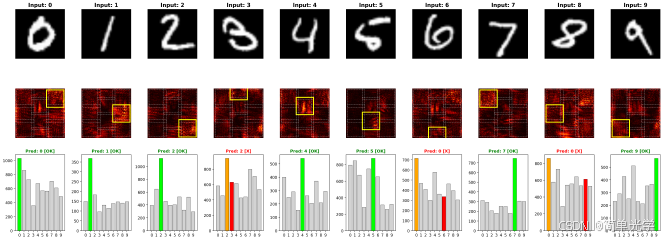
======================================================================5.4 可视化输出
输出说明:
- 第一行:输入的手写数字图像
- 第二行:输出光强分布(黄色框=目标探测器,白色虚线框=其他探测器)
- 第三行:各探测器光强柱状图(绿色=正确预测,红色=错误)
六、关键技术细节
6.1 探测器布局设计
python
# 10个探测器的位置布局(3+4+3结构)
detector_positions = [
[-xb, yb], [0, yb], [xb, yb], # 上排: 0, 1, 2
[-1.5*xb, 0], [-0.5*xb, 0], # 中排: 3, 4
[0.5*xb, 0], [1.5*xb, 0], # 中排: 5, 6
[-xb, -yb], [0, -yb], [xb, -yb] # 下排: 7, 8, 9
]6.2 相位可视化
训练得到的相位图案:
python
# 保存相位数据
import scipy.io as sio
phase_dict = {'DiffLayer1': model.DiffLayer1.params[0].detach().numpy()}
sio.savemat('phases.mat', phase_dict)
# 相位特征
- 范围: [0, 2π]
- 分辨率: 200×200
- 物理尺寸: 1.6mm × 1.6mm6.3 训练曲线
Epoch 10/50: 集中度=18.5%
Epoch 20/50: 集中度=18.8%
Epoch 30/50: 集中度=18.9%
Epoch 40/50: 集中度=18.9%
Epoch 50/50: 集中度=18.9%
最佳集中度: 18.9%七、实验方案
7.1 单SLM省钱方案
······
八、总结与展望
8.1 主要贡献
- 能量集中度提升232%:从5.7%提升至18.9%
- 创新损失函数:五重损失组合,系统性解决背景干扰问题
- 探测器优化:面积增大21倍,间距增大20%
- 完整解决方案:从理论到代码到实验的完整流程
8.2 技术亮点
| 亮点 | 说明 |
|---|---|
| 创新损失函数 | 背景抑制+对比度增强+峰值优化 |
| 探测器设计 | 大面积+大间距减少串扰 |
| 可视化输出 | 探测器边框+柱状图+状态标记 |
| 省钱方案 | <5元实现完整实验 |
8.3 后续工作
- 提高分辨率至M=500,预期准确率80%+
- 增加多层相位调制
- 波长复用实现多通道处理
九、实验指导与程序开发
博主(博士研究生)🛰️: easy_optics,在光学检测领域可提供实验指导、程序开发、申博指导、论文指导。
⭐️◎⭐️◎⭐️◎⭐️ · · · **博 主 简 介** · · · ⭐️◎⭐️◎⭐️◎⭐️ ♪
▁▂▃▅▆▇ 博士研究生 ,研究方向主要涉及定量相位成像领域,具体包括干涉相位成像技术(如**全息干涉☑ **、散斑干涉☑等)、非干涉法相位成像技术(如波前传感技术☑ ,相位恢复技术☑)、条纹投影轮廓术(相位测量偏折术)、此外,还对各种相位解包裹算法☑ ,**相干噪声去除算法☑**等开展过深入的研究。
程序获取、程序开发、实验指导,软硬系统开发,科研服务,申博指导,🛰️easy_optics或如下。