在计算机视觉领域,OpenCV是一款功能强大的开源库,能够轻松实现图像的各种处理操作。本文将结合实际代码案例,详细讲解OpenCV中三大实用的图像处理技巧:图像旋转、多对象模板匹配(含旋转模板)、高斯金字塔与拉普拉斯金字塔操作,帮助大家快速掌握这些核心技能。
一、图像旋转:两种实现方式
图像旋转是图像处理中最基础的操作之一,OpenCV提供了两种便捷的实现方式:基于NumPy的rot90函数和OpenCV原生的rotate函数。
1. NumPy的rot90函数
np.rot90()可以实现图像按90度倍数旋转,参数k控制旋转方向和次数:
• k=-1:逆时针旋转90度
• k=1:顺时针旋转90度
• k=2:旋转180度
2. OpenCV的rotate函数
OpenCV原生的cv2.rotate()函数更直观,直接通过参数指定旋转类型:
• cv2.ROTATE_90_CLOCKWISE:顺时针90度
• cv2.ROTATE_90_COUNTERCLOCKWISE:逆时针90度
• cv2.ROTATE_180:旋转180度
核心代码实现
python
import cv2
import numpy as np
# 读取图像
img = cv2.imread('./kele.png')
# 方法1:np.rot90实现旋转
rotated_np_anticlock90 = np.rot90(img, k=-1) # 逆时针90°
rotated_np_clock90 = np.rot90(img, k=1) # 顺时针90°
# 方法2:cv2.rotate实现旋转
rotated_cv_clock90 = cv2.rotate(img, cv2.ROTATE_90_CLOCKWISE)
rotated_cv_anticlock90 = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE)
rotated_cv_180 = cv2.rotate(img, cv2.ROTATE_180)
# 显示图像
cv2.imshow('原始图像', img)
cv2.imshow('np逆时针90°', rotated_np_anticlock90)
cv2.imshow('cv顺时针90°', rotated_cv_clock90)
cv2.imshow('cv旋转180°', rotated_cv_180)
cv2.waitKey(0)
cv2.destroyAllWindows()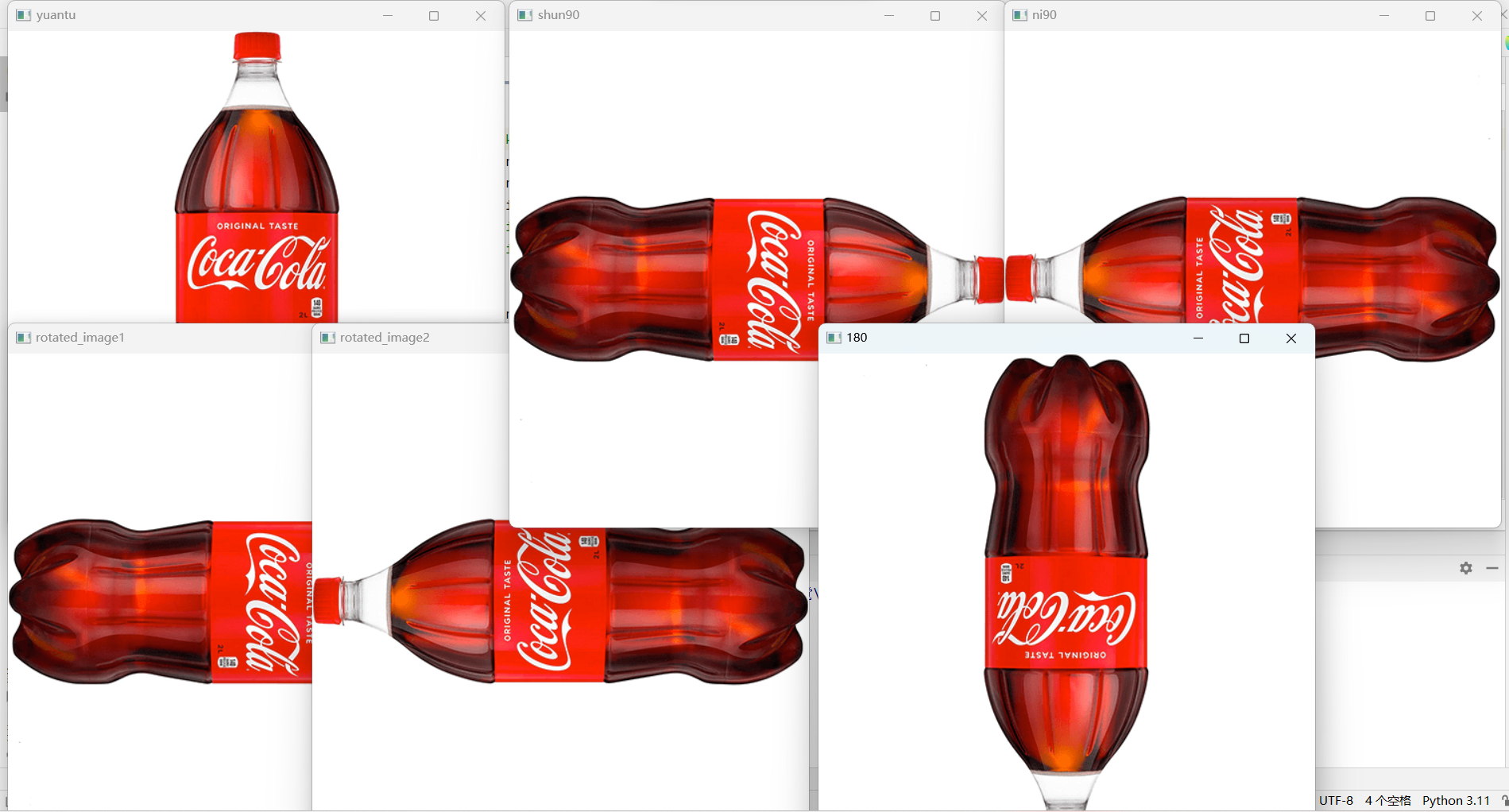
注意事项
• 图像读取路径需正确,若路径错误会导致img为None,后续操作报错;
• cv2.imshow()需配合cv2.waitKey(0)使用,否则窗口会一闪而过;
• 旋转后图像尺寸会变化,需根据实际需求调整显示或保存逻辑。
二、多对象模板匹配:支持旋转模板
模板匹配是在大图中寻找与模板相似区域的方法,常规模板匹配仅能匹配固定方向的目标,而实际场景中目标可能旋转,因此需要结合图像旋转实现多方向模板匹配。
1. 核心思路
• 将模板旋转为多个方向(逆时针90°、原始、顺时针90°、180°);
• 遍历每个旋转后的模板,在灰度图中进行模板匹配;
• 设定匹配阈值,筛选出匹配度高的区域,绘制矩形框标注。
2. 完整代码实现
python
import cv2
import numpy as np
# 读取原始图像和模板图像
img_rgb = cv2.imread('image.jpg')
img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY)
template = cv2.imread('tem.jpg', 0)
h, w = template.shape[:2]
# 生成不同旋转角度的模板列表
templates = [
np.rot90(template, k=-1), # 逆时针90°
template, # 原始方向
np.rot90(template, k=1), # 顺时针90°
np.rot90(template, k=2) # 180°旋转
]
# 遍历每个模板进行匹配
for temp in templates:
# 模板匹配(归一化相关系数法)
res = cv2.matchTemplate(img_gray, temp, cv2.TM_CCOEFF_NORMED)
# 设定匹配阈值,筛选高匹配度区域
threshold = 0.8
loc = np.where(res >= threshold)
# 绘制匹配区域矩形框
for pt in zip(*loc[::-1]):
cv2.rectangle(img_rgb, pt, (pt[0] + w, pt[1] + h), (0, 0, 255), 1)
# 显示匹配结果
cv2.imshow('多方向模板匹配结果', img_rgb)
cv2.waitKey(0)
cv2.destroyAllWindows()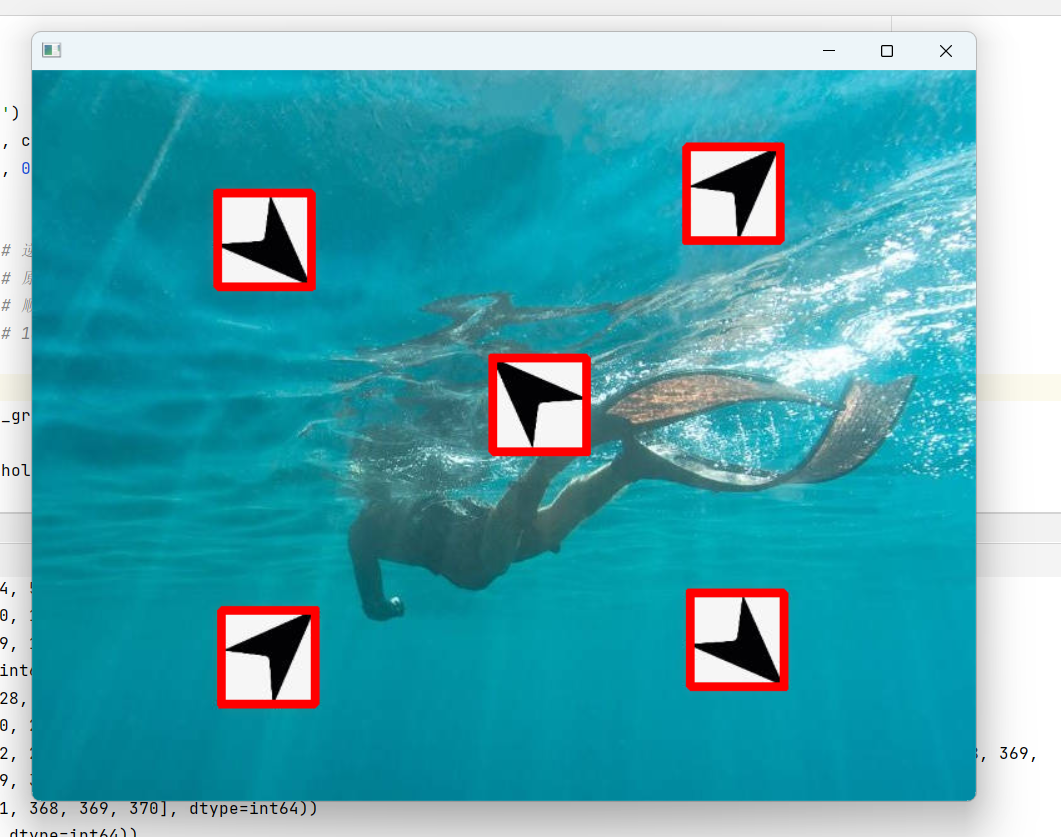
关键说明
• 模板匹配前需将图像转为灰度图,减少计算量;
• cv2.TM_CCOEFF_NORMED是归一化相关系数法,匹配值范围为-1,1,越接近1匹配度越高;
• 阈值需根据实际场景调整,过高可能漏检,过低可能出现误检;
• zip(*loc::-1)用于将匹配坐标转换为(x,y)格式,方便绘制矩形框。
三、图像金字塔:下采样、上采样与拉普拉斯金字塔
图像金字塔是一种多尺度表示方法,核心分为高斯金字塔(下采样+上采样)和拉普拉斯金字塔(用于图像复原),常用于图像缩放、特征提取、图像融合等场景。
1. 高斯金字塔核心操作
(1)下采样(pyrDown)
下采样会减小图像尺寸,步骤为:先对图像进行高斯模糊,再删除偶数行和列,图像分辨率变为原来的1/4。
python
# 读取灰度图像
face = cv2.imread('kele.png', cv2.IMREAD_GRAYSCALE)
# 第一次下采样
face_down_1 = cv2.pyrDown(face)
# 第二次下采样(基于第一次下采样结果)
face_down_2 = cv2.pyrDown(face_down_1)(2)上采样(pyrUp)
上采样会增大图像尺寸,步骤为:先将图像尺寸放大两倍(行、列各补0),再对图像进行高斯模糊,恢复部分细节,但无法还原下采样丢失的信息。
python
# 第一次上采样
face_up_1 = cv2.pyrUp(face)
# 对下采样后的图像上采样
face_down_1_up = cv2.pyrUp(face_down_1)2. 拉普拉斯金字塔:图像复原的关键
拉普拉斯金字塔的核心思想是:原始图像 = 下采样后上采样的图像 + 拉普拉斯残差,公式为:Ln = Gn - pyrUp(Gn+1),其中Ln为拉普拉斯金字塔第n层,Gn为高斯金字塔第n层。
通过拉普拉斯残差可以实现图像复原:
python
# 计算拉普拉斯残差L0
L0 = face - face_down_1_up
# 计算拉普拉斯残差L1
L1 = face_down_1 - face_down_2_up
# 复原原始图像
fuyuan = face_down_1_up + L0完整代码示例
python
import cv2
# 读取灰度图像
face = cv2.imread('kele.png', cv2.IMREAD_GRAYSCALE)
cv2.imshow('原始图像', face)
# 高斯金字塔下采样
face_down_1 = cv2.pyrDown(face)
face_down_2 = cv2.pyrDown(face_down_1)
cv2.imshow('下采样1次', face_down_1)
cv2.imshow('下采样2次', face_down_2)
# 高斯金字塔上采样
face_up_1 = cv2.pyrUp(face)
face_down_1_up = cv2.pyrUp(face_down_1)
face_down_2_up = cv2.pyrUp(face_down_2)
cv2.imshow('上采样1次', face_up_1)
cv2.imshow('下采样1次后上采样', face_down_1_up)
# 拉普拉斯金字塔与图像复原
L0 = face - face_down_1_up
L1 = face_down_1 - face_down_2_up
fuyuan = face_down_1_up + L0
cv2.imshow('拉普拉斯残差L0', L0)
cv2.imshow('复原图像', fuyuan)
cv2.waitKey(0)
cv2.destroyAllWindows()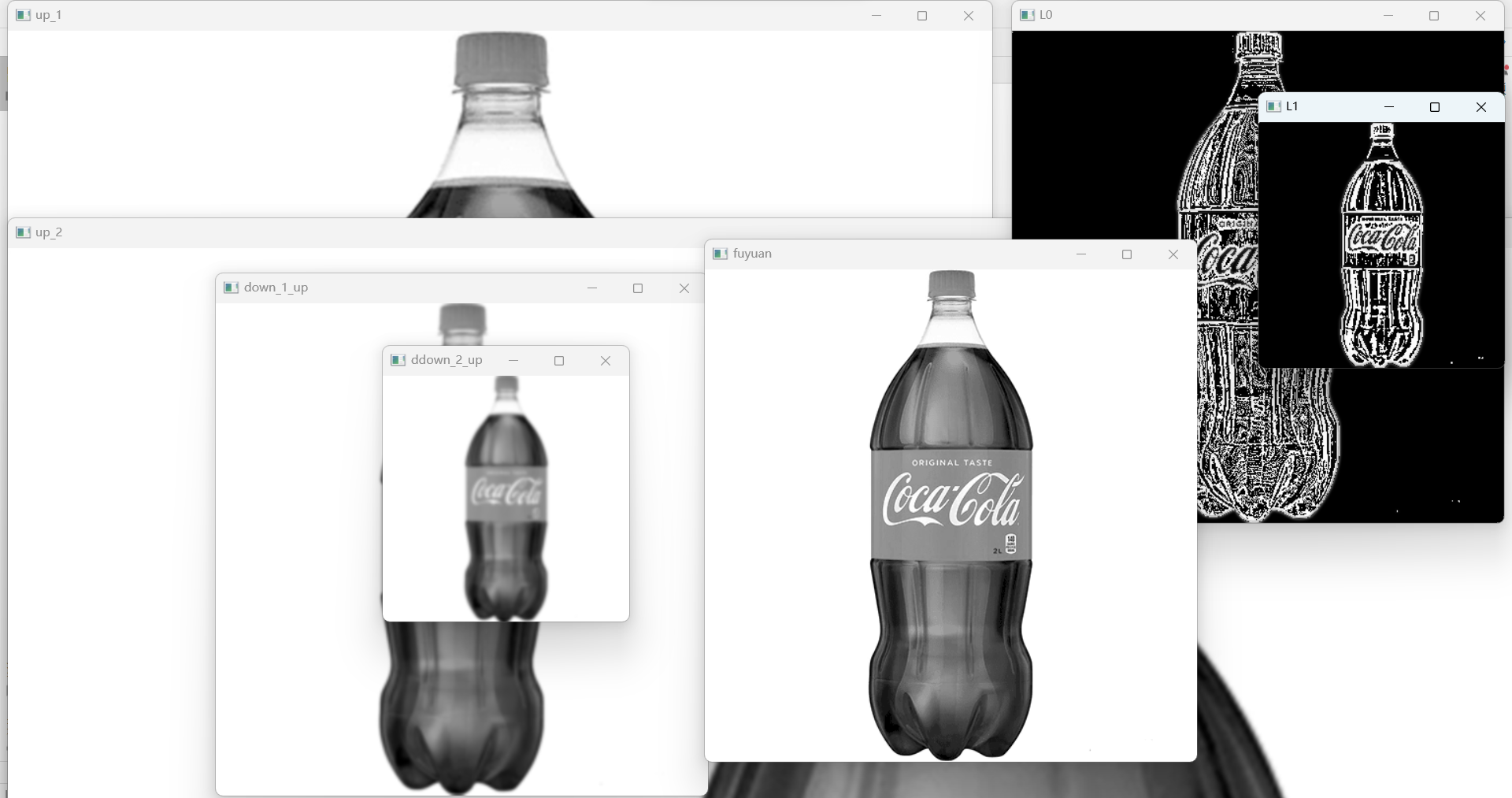
核心结论
• 下采样会丢失图像细节,上采样无法完全复原,只能恢复尺寸;
• 拉普拉斯残差保存了图像的细节信息,结合上采样图像可复原原始图像;
• 金字塔操作适用于多尺度分析,比如在目标检测中匹配不同尺寸的目标。
四、总结与拓展
本文通过实战代码讲解了OpenCV中图像旋转、金字塔操作、多方向模板匹配三大核心技巧,总结如下:
-
图像旋转可通过np.rot90或cv2.rotate实现,按需选择即可;
-
高斯金字塔实现图像尺度变换,拉普拉斯金字塔保存细节用于复原;
-
多方向模板匹配通过旋转模板覆盖目标不同角度,提升匹配鲁棒性。
拓展应用场景
• 图像旋转:文档扫描矫正、车牌识别中车牌角度矫正;
• 多模板匹配:工业质检(检测不同角度的缺陷)、游戏界面元素识别。
• 图像金字塔:图像融合(如全景拼接)、目标检测多尺度特征提取;
掌握这些基础操作后,可结合实际需求进行拓展,比如将模板匹配与图像金字塔结合,实现多尺度、多方向的目标匹配,进一步提升图像处理的实用性。