《智能的理论》全书转至目录****
不同AGI的研究路线对比简化版:《AGI(具身智能)路线对比》,欢迎各位参与讨论、批评或建议。
一.概述
1.动作序列学习
动作序列学习在人类的日常生活中发挥着广泛而重要的作用,它是指由多个简单的动作元素整合成一个单一连贯的动作序列的过程。骑车、打球、跳舞,甚至是每天起床这样的小事,都是由无数个动作序列组合而成,并通过练习习得。最初这些动作是不协调的、笨拙的,通过练习,动作变得流畅和熟练起来,变成自动化的动作。例如排球初学者通过对持球、抛球、挥臂击球等一系列动作序列进行学习来掌握正确的发球姿势。(王露和仲夏,2023)
2.内隐学习和外显学习(王露和仲夏,2023)
动作序列学习可以是内隐学习也可以是外显学习。外显学习是一个有意识的过程,学习者知道所学动作,需要付出一定的努力和采取特定的策略来完成学习任务(比如坚持重复练习)。当被试意识到并且能报告序列任务中存在的序列规则,则发生了完全的外显学习。内隐学习指的是主体无目的性,并自动获得事物之间结构的过程。当被试的随着练习而变得熟练,而且被试又没有意识到动作序列的规则时,则发生的是内隐学习。
3.研究范式
(1)序列反应时任务
在序列反应时任务(Nissen和Bullemer,1987)中,对被试呈现一组序列(每个序列如长度的符号串"ABCBAAAB"),每个序列可以是固定排列或随机排列。其中,固定排列是指在这组序列中这个序列多次重复出现(被试对固定序列的规律是未知的),而随机排列则是指这个序列在这组序列中没有重复。屏幕中央水平排列4个空间位置,序列中的符号每次出现在其中一个空间位置上时,被试需要对目标符号所在位置进行尽可能快而准确的按键反应(如A对应按键1,B对应按键2...)。如图1。经过一段时间的练习后,相比随机序列,被试对固定序列的反应会更快。实验后让被试进行意识性的口语报告,被试报告没有发现规则或感觉有规则但无法准确描述出,这就说明被试对固定序列的知识发生了内隐学习。
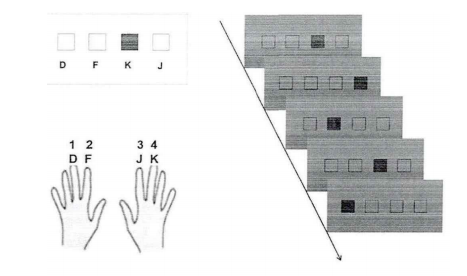
图1
(2)矩阵扫描任务
矩阵扫描任务(Lewicki,Czyzewska和Hofiman,1987)将屏幕分成4个象限,任务是要求被试对指定的目标数字出现在哪个象限进行反应。被试需要进行一系列试次,每组试次有7个试验,其中前6次的试验中,屏幕只出现目标数字,第7次试验中,35个干扰项目伴随目标数字一起出现,而目标数字出现的象限是可以根据前面的第 1、3、4、6 次试验中目标出现的象限进行判断的。在第1、3、4、6的试验中,目标数字出现的象限组合没有重复(比如第1次试次出现在第三象限,第3、4、6次的目标数字就不会出现在第三象限),因此一共有24个规则(4*3*2*1)确定第7次试验的目标位置。由于规则比较多,而且第2和5次的试验对第7次的目标出现位置无影响,因此规则序列很难外显获得(指第1、3、4、6的试验与第7次试验之间的推理规则)。结果发现随着练习的进行,被试的反应速度和正确率稳步提高。而当呈现的规则突然发生改变,正确率和反应速度大幅度下降,说明被试内隐地逐渐习得有关推断关系的规则信息。
4.动作序列的迁移学习(王露和仲夏,2023)
动作序列的迁移学习是指个体将在一个情境中所学到的知识应用到具有相似特征的另一个情境中。例如,可以将在乒乓球技能学习中获得的目标定位、手眼协调和击球动作的时间控制等技术应用于网球技能学习中,以促进网球技术。根据迁移对动作技能绩效的影响可以将迁移分为正迁移和负迁移。已经掌握的旧技能可以促进对新技能的学习,就是动作序列的正迁移。负迁移是旧技能对新技能的学习造成干扰,从而降低新技能的学习速度。
二.序列表征和结构
在序列反应时任务中,随着练习的进行,被试对规则序列的反应时逐渐下降,而将刺激的呈现顺序随机化之后,被试的反应时又出现明显的上升。这个结果说明被试的反应依赖于序列规则,或者说被试习得了某种潜在的序列表征。那么这些序列表征到底是什么呢?目前主要的观点有刺激-刺激表征(S-S)、刺激-反应表征(S-R)和反应-反应表征(R-R)。(秘晓冉,2007)
1.刺激-刺激表征
刺激-刺激表征(S-S)学习认为,被试习得的是刺激序列的规则表征,即依赖前后刺激联结的学习,也称为知觉学习。知觉学习的实验可以采用观察学习的实验范式,即在学习阶段一般只让被试观察刺激的呈现,而不对刺激进行反应,而在测验阶段,如果对规则序列的反应时快于随机序列的,则认为发生知觉学习。比如,Howard、Matter和Howard(1992)的研究中,要求一组被试完成序列反应时任务,另一组被试只是观察序列刺激的呈现而不用进行任何反应。在测验阶段,两组被试则都要进行反应。结果发现,仅观察刺激的被试在反应时上的表现与在练习阶段作反应的被试没有差别。另外,Keele等人(Keele,Jennings,Jones和Caulton等人,1995)在研究中采取了从手指按键到言语报告的迁移测验,结果发现,相比于随机序列,被试对规则序列的迁移学习效果更好。虽然从手指反应改为口头报告反应时,被试的学习效应减低,但是可以肯定的是,对序列刺激的观察中存在着知觉学习。
2.反应-反应表征
反应-反应表征学习(R-R)认为,序列学习基于相邻反应之间的联结而发生,也被称为动作学习。在序列任务中,刺激事件(刺激的呈现)是较容易受到注意的一类事件,而相比较而言,对刺激进行反应的动作则较不容易受到注意。但与刺激事件相比,反应事件更为复杂。首先,在完成反应的过程中,效应器(如手指)的运动成为一类事件;其次,效应器移动到反应键按下则视为另一类事件(手指运动的一个结果);最后,动作的反馈或者效果的事件也可作为另一类事件(例如,在按键上受到压力)。可见,在反应事件中存在着至少三类相伴随的事件序列,基于效应器依次运动的效应器序列(如手指运动序列)、基于运动目标空间的反应空间位置序列(反应按键的空间位置序列),基于所得效果依次联结起来的反应效果序列。下面分别对这三种R-R学习进行讨论。
(1)基于效应器序列的学习
Park和Shea(2005)的实验中,序列元素包含四种元素,每种元素分别对应反应的四个不同的杠杆角度。根据呈现的序列,被试通过前臂与肘关节根据序列中的元素不断将一个杠杆角度移动至另外一个角度上。实验中,被试分别在练习1天和练习4天之后用练习过的手臂进行保持测试以及另一只未训练的手臂进行迁移测试,结果练习一天之后迁移和保持成绩没有差异,而练习4天之后保持成绩则比迁移成绩好。研究者认为这种现象说明了经过大量的练习之后,有关效应器动作序列的信息已经参与到了序列学习中,因此在作出动作时能利用这种信息,所以原效应器的保持测验成绩更好;相反当练习不足时效应器不能参与到对序列的学习,所有原效应器与迁移效应器的成绩相当。
(2)基于空间反应序列的学习
Nattkemper和Prinz(1997)的研究采用了8个字母刺激与4个反应,每两个刺激对应一个反应(如出现A和B时均按按键1,而其他字母(如C)则按其他按键)。实验中的序列包括两种条件,(a)规则序列中用与同一个反应相对应的刺激替代原刺激(如用B替换序列中的A);或(b)是用与不同反应相对应的刺激替换刺激序列中的原刺激(如用C替换序列中的A)。前者破坏了刺激序列而不破坏反应序列,后者则同时破坏刺激序列和反应序列。实验结果显示,在替换原刺激时,只有同时破坏刺激序列和反应序列时反应时才会上升,而仅仅破坏刺激序列时则没有反应时上升。这一结果说明被试在运动序列学习中掌握的是反应序列。
Willingham等人(Willingham,Wells和Farrrell,2000)对反应学习中的反应位置序列和效应器运动序列进行了区分。实验中,在练习阶段,让被试通过非兼容性方式进行反应,所谓非兼容是指被试将双手交叉放置在按四个水平排列的反应键上。从左至右,手指依次是右手食指,右手中指,左手中指,左手食指,按此顺序分别对从左到右的空间位置作反应。在迁移阶段,则两手则按正常的方式放置,从左到右,手指依次是左手中指,左手食指,右手食指和右手中指,以这样的手指顺序对从左到右的空间位置作反应。在迁移阶段,通过控制呈现的序列,可以保持效应器运动的序列不变,也可以保持按键序列(反应空间位置序列)不变。结果证明只有当按键序列保持不变的时候,序列学习才可以发生迁移。该现象说明反应的学习中占主导的是反应空间位置序列的学习,而不是效应器运动序列的学习。
(3)基于反应效果序列的学习
Hoimann等人(Hofimann,Sebald和Stöcker,2001)认为在标准序列反应时任务中,按键总会使被试经验到其动作的反馈(如按压特定键时感到特定手指上的压力),而构成反应-效果联结。而如果在序列学习的表征中反应效果也参与其中的话,那么反应效果也会促进序列学习。在Hofann等人的一系列研究中,研究者在序列反应时任务的反应之后附加了"反应无关"的声音效果,即在反应之后呈现的作为反应效果的声音刺激,它既不需要额外的反应也不强调要对它特别的注意。结果证明,附加的反应无关效会促进规则序列的学习。
3.刺激-反应表征
Willingham、Nissen和Bullemmer(1989)提出了刺激-反应表征(S-R)的学习,即认为序列学习效应的出现是因为被试在不断的练习中对刺激和反应之间对应关系的学习,因为S-R映射越来越稳定,所以知觉到刺激之后反应也越快。
4.双学习系统理论
Keele等人(Keele、lrvy、Mayr和Hazeltine等人,2003)的双学习系统理论认为序列的规则表征由不同的两个学习系统进行处理。一个系统被称为多维度系统,它能在不同维度或不同形式的事件之间自动建立联结(比如动作维度和知觉维度,或者声音维度和视觉维度等)。另外一个系统称为单维度系统,它由一系列模块组成,每个模块上的输入只限于某一维度上的信息(如反应维度仅接受反应感觉,或者空间维度只接受空间信息输入等),并对发生在单一维度上的事件自动构成联结。
两系统之间一个重要差异在于所需要的注意资源不同,在多维度系统中,只有得到注意的信号才能进入到多维度联结系统。如果信息中包含的相关事件(包括不同维度的)被注意到,联结将自动形成。如果随机事件也被注意到,就将干扰学习,反之如果没有被注意到则不会干扰关联事件间的联结。这样做的好处在于能屏蔽与任务无关的干扰,现实生活中场景通常涉及同时出现且相互无关的各种刺激。例如,当一个人走在街上与朋友交谈时,他还会听到鸟儿的歌声、交通的声音以及其他背景中的声音,还会看到各种各样的景象。如果没有注意的限制(仅允许被注意的信息进入多维系统),这些相互无关的事件流可能会导致混乱------各种无关事件之间产生自动联结。而单维度系统可以在注意之外进行操作,即单维度事件可以在没有注意的情况下联结。该理论对内隐和外显学习的区分也提供了一个新视角。因为单维度系统在注意之外进行操作,学习完全是内隐的。在多维度系统内发生的学习也同样被认为是内隐的,只要联结机制自动对进入系统的信息进行操作。又因为这些事件都得到了注意,所以是对意识加工开放的,这些表征也可以是外显的。
5.结构
(1)序列自身的结构
Stadler(1992)强调序列的整体统计结构对序列学习的重要性。他创造出称之为低、中、高统计结构的3种序列,以此来变化序列的结构性。具体地说,他将一个由6个元素组成的首串(如BDBCAB)与3个尾串(如ADAC,CDBC,DBCD)分别相连构成3个序列:BDBCABADAC、BDBCABCDBC、BDBCABDBCD,它们分别对应于低、中、高结构。低结构情况下没有任何对式(连续的两个元素)是重复的;在中结构序列情形下,它产生了3个已存在的重复对式(两个BC和一个DB)和一个已存在的三重复式(DBC);在高结构情形下,共形成了4个已存在的重复对式和2个三重复式(分别是一个BD、2个DB和一个BC,一个BDB,一个DBC)。结果显示:对结构水平的控制确实影响序列学习。
Cohen等人(Cohen,Ivry和Keele,1990)用3种具有不同内部结构的序列形式对这一问题行了研究,分别是独特序列、歧义序列、混合序列。其中,独特序列是指序列中每个元素的后一个元素都是唯一的,比如序列"15243",元素"1"后面的只可能是元素"5","5"后的元素只可能是"2"...。这种序列具有较强的预测性,因为给出一个元素便可知道其后的元素;歧义列中,每个元素后的跟接的元素不唯一,如"1323121"中,"1"可以接"3"也可以接"2","3"后可以接"2"也可以接"1",这种序列的预测性较弱;混合序列部分元素可预测(后续元素是唯一的),而部分元素不能预测(后续元素不是唯一的),如"142312"中"1"不可预测,其他元素预测性较强。实验使用双任务范式以分散对序列学习的注意,结果发现,只有当使用的序列是歧义序列时才出现次级任务对内隐序列学习的削减。这说明,序列的可预测性结构影响对序列的学习。
(2)组块化形成的结构
当人们第一次尝试做某个动作序列时,由于动作序列各部分之间的衔接不紧凑,因而人们不可能很顺畅地完成该动作序列。但随着练习的进行动作序列的完成会变得更加迅速且流畅。Muehlbauer等人(Muehlbauer,Panzer和Shea,2007)对此现象所作的一种解释是,随着练习的增加,一种动作序列中的两个或者多个元素被"组块化"(20-2:工作记忆)或"打包"成为多个独立的子序列而被执行。通常,对序列中第一个要素的反应较慢,随后便对剩余元素有较快地反应(Povel等,1982)。因为操作初期子序列需要被识别、编码,当与编码有关的程序已完成,便可以较快地实现子序列中接下来元素的编码。大量练习之后,子序列之间的衔接使得练习者操作动作序列更加迅速且流畅。因为,在执行当前的子序列时,下一个子序列也已开始加工。这种串联加工模式使得子序列之间的延搁减少。另外,当一个序列的组块化程度越高(一个序列的组块数量越少,组块程度越高),反应时间越快。因为对于同等长度下的序列,如果组块化程度越高,那么它分解成不同组块的数量就越小,相当于"长度"越短,因此学习得更快。如"ABCDEFG"对于一个熟练的人来说,他对该序列的形成的组块假设是"ABC DE FG"(空格分开不同组块),一共3个组块,如果每个组块可变相看作是一个"元素",那么他相当于学习一个"长度为3"的序列,因此学习更容易;对于一个不熟练的人来说,他对该序列的形成的组块假设是"AB CD E F G",其"长度"相当于5,因此学习更难(通常越长的序列越难学习)。最后,与序列自身存在的结构不同,通过练习也可以形成组块结构。
三.影响序列学习的因素
1.序列长度
Howard及其同事(Howard和Howard,1989)训练被试或用10个元素长的序学习列,或用16个元素长的序列学习,得到的结果是较短的序列具有更显著的学习效应。
2.序列的结构
正如上述所言,序列的结构也是序列学习的重要因素。Stadler与Craig(1997)探讨了序列长度与结构问题,发现一个较长的具有较高结构的序列较之一个简短的具有较低结构性的序列能被更好的学习。其中,这里的高结构性序列是指前一事件能高度预测其后继事件的序列。
3.空间信息
Koch和Hofmann(2000)通过四个实验揭示了空间信息参与对序列学习的影响。首先,这个研究对刺激序列和反应序列的空间信息进行分离。第一实验中,采用空间位置构成刺激序列(在不同位置呈现的不同元素构成的序列),而且也通过水平排列的按键进行反应,所以空间信息同时参与到刺激序列和反应序列中;第二个实验中,采用空间位置构成刺激序列,而采用声音报告进行反应,这时空间信息只参与到刺激序列中;第三个实验中采用数字作为刺激,采用水平排列的按键进行反应,此时空间信息只参与到反应序列中;第四个实验则采用数字作为刺激,同时采用声音报告进行反应,此时刺激序列和反应序列上都没有空间信息的参与。结果证明,无论是刺激序列还是反应序列,当空间信息的存在都会使序列学习得到显著的提升,这表明空间学习是感知学习和运动学习中的关键因素。
4.学习性质
Russeler和Rosler(2000)曾针对内隐学习与外显学习的知觉表征与动作反应表征之间的关系进行过研究。实验采用了8个刺激和4个反应,每两个刺激对应一个反应。在实验中的序列包括两种条件,(a)规则序列中用与同一个反应相对应的刺激替代原刺激;或(b)是用与不同反应相对应的刺激替换原刺激。前者破坏了刺激序列,而不破坏反应序列,后者则既破坏了刺激序列又破坏了反应序列。实验结果证明,对于外显学习的被试,在第一类替换序列上的反应时比原序列上的反应时更长,标志其知觉学习的参与。在第二类替换序列上的反应时比在第一类的和原序列的反应时都要更长,而且在学习后期这一趋势更加明显,标志其反应学习的参与。因此,外显学习时同时发生反应学习和知觉学习,刺激序列的表征和反应序列的表征同时参与到序列学习中;而对于内隐学习的被试,第二类序列上的反应时比在第一类的和原序列的反应时都要更长,但是在第一类序列和原序列上的反应时并没有区别。这说明,内隐学习的被试只发生了反应学习而没有知觉学习,只有反应序列的表征参与到了序列学习中。
5.注意
在内隐序列学习中研究注意主要采用两种研究范式:操控次级任务的范式(双任务范式,即将序列学习作为主任务的同时,增加一个次任务同时执行以分散对主任务的注意)和操控学习任务内的注意。
(1)操控次级任务的范式
在此类范式中,典型的次级任务是数声任务。实验中,每个被试除了完成序列反应时任务,还会听到一个高音或者低音,需要对其中一种声调(如高音)进行计数,每个实验后报告声调的次数。Nissen和Bulemer(1987)在实验中发现,次级任务对内隐序列学习产生了削弱的作用,干扰任务的增加使分配给主任务的注意减少,据此他们认为内隐序列学习是需要注意的。在Cohen,Ivry和Keele(1990)的实验中,他们发现对于混合序列,对次级任务难度的控制并不影响被试的序列学习水平,而歧义序列则不能在有次级任务的条件下被学会,说明对歧义序列的学习需要较多的注意。
然而也有研究结果显示内隐序列学习的效果与注意没有关系,而是学习过程中的数声任务干扰了序列结构而导致学习效果的削弱。Stadler(1995)使用不同形式的次级任务对内隐序列学习的影响进行了细致研究,包括三种不同的次级任务条件:在第一种条件下,第二任务为数声任务,要求被试在完成序列反应时任务的同时还要对声音刺激中的高音进行计数,每次试验中高音和低音随机出现,数声任务不仅需要注意资源的参与还会破坏序列结构的组织;在第二种条件下,第二任务为记忆任务,在被试开始序列反应时任务之前屏幕上呈现几个字母,要求被试在完成序列反应时任务的同时还要记忆先前屏幕中呈现的字母,因而记忆任务仅需要注意资源参与但不会破坏对序列的组织;在第三种条件下,不会出现第二任务,但是序列反应时任务中的刺激间隔会时短时长,这种变化不会影响注意资源但会破坏对序列的组织。结果发现,当序列的组织受到破坏时,被试的序列学习成绩才会降低。因此,他们提出了"破坏序列组织"理论,认为第二任务通过破坏序列结构来降低内隐序列学习的成绩。
(2)操控学习任务内的注意
Deroost等人(Deroost,Coomans和Soetens,2009)从操控目标刺激和分心刺激的角度对内隐序列学习的注意进行研究。他们要求被试对目标字母"XO"或"OX"形成的序列进行反应。目标刺激被3个分心物环绕着,分心物可能由"YQ"或"QY"组成的,也可能由"MN"和"NM"组成。由于前者与目标刺激更为相似,因此,相比后者组成分心物,前者组成分心物时需要被试更多的注意,在前者条件下更困难,而后者更简单。实验一共分为15个阶段,每个阶段有100个试次,其中前11个阶段被称为学习阶段;后5个阶段称为测试阶段。在学习阶段呈现目标序列的同时会呈现分心物,而测试阶段可能呈现与学习阶段相同难度的分心物,也可能不呈现分心物,其他条件与学习阶段一样。形成(a)高-高条件;(b)低低条件;(c)高-没有分心物条件;(d)低-没有分心物条件,共四种。实验结果显示,在学习阶段,条件(a)和(c)的反应时均长于(b)和(d)的,说明注意影响了被试的成绩;但在测试阶段,条件(c)和(d)的分心物撤走,如果高负荷分心物影响学习,那么可以预测(d)的反应时应该高于(c)。但结果显示,两种条件的成绩相近,且均低于(a)和(b)的。这说明,注意只是影响了被试的反应成绩,但并没影响对序列的学习。
四.运动序列迁移
当前,关于动作序列学习迁移的研究主要集中在三个方面,即效应器迁移、成比例和不成比例迁移以及相似动作序列学习之间的干扰效应。
1.效应器迁移(刘涵慧和姚梅林,2009)
所谓效应器,即参与技能实施的主要身体部位,例如:一般打字技能的效应器为双手,如果仅要求左手打字,则效应器为左手。在动作学习中,整个学习过程究竟是依存于效应器还是独立于效应器?例如,在训练阶段借助某个效应器(如左手)获得了某种动作技能(如打字)后,如果未经训练的右手也拥有了该动作技能,则该动作技能就是独立于效应器的、可迁移的技能;反之,如果未经训练的右手不能完成打字动作,那么该技能就是依存于效应器的、不可迁移的技能。对此,不同研究者给出了不同的结论。
(1)独立于效应器的机制研究
研究者发现,用一个效应器练习某种动作序列技能,即使另外一个效应器从未受过这种动作序列的训练,也可以完成该动作序列,表现出独立于效应器的机制。例如,Cohen,Ivry和Keele(1990)发现,从未接受过按特定顺序按键反应训练的手臂可以出色地完成序列按键动作。他们认为,尽管手臂没有接受序列按键任务的训练,但食指、中指和无名指曾受此训练,所形成的技能并未固着于所训练的手指上,可以从手指效应器向手臂效应器迁移。因此,研究者认为,动作学习是不依存于或受限于特定效应器的,学习者学到的是抽象的动作,并可以迁移到其他的效应器上,成为其他效应器所拥有的技能。
(2)依存于效应器的机制研究
持有独立于效应器观点的研究者通常遵循着这样的研究思路,即训练由某个效应器参与的动作序列,直到个体掌握该动作序列技能,然后由另一效应器完成该动作序列。如果新效应器完成该动作序列的成绩优于完成其他的未学习动作序列的成绩,则可认为发生了效应器间技能的迁移,进而证明技能的获得是独立于效应器的。而其他研究者(Rand,Hikosaka,Miyachi和Lu等人,1998)则认为,这种研究思路并不完善,因为仅比较新效应器执行旧动作序列和新动作序列之间的成绩差异尚不足以证明迁移是否发生,还需要将新、旧效应器执行旧顺序的成绩进行比较。他们曾以猴子为被试,训练它们用左手形成对某个刺激顺序的按键反应,当要求其用右手对相同的刺激顺序进行反应时,尽管右手执行左手训练过的旧顺序的成绩比执行新顺序好,但右手执行旧顺序的成绩比左手的差。因此,研究者认为,尽管左手获得的技能在一定程度上迁移到了右手,但这个迁移是不完全的。由此也可说明,动作学习在一定程度上既独立于效应器,也依存于效应器,两种学习机制有可能并存。
(3)不同学习阶段的效应器作用机制
练习程度影响动作学习,这是许多研究者认可的结论。同样,效应器作用机制也与练习程度或学习阶段有关。例如,Keele等人(Keele,Jennings,Jones和Caulton等人,1995)的实验证明了动作序列学习能在不同效应器之间的迁移,即支持独立于效应器的观点,但他也谨慎地指出,其结论可能与训练的次数或练习程度有关。因为依存于效应器成分发展速度较慢,在学习的初级阶段或训练次数较少时,依存于效应器的学习成分尚未得到充分发展,因此也难以被检测到。(该理论假设,运动程序包含两种成分,一种是不依存于效应器的,可以在各效应器间迁移;另外一种是依存于效应器的,无法迁移)
动作学习的脑机制研究也发现,动作学习的不同阶段所激活的脑区有所不同(Hikosaka ,Nakamura,Sakai和Nakahara,2002)。一般而言,随着练习次数的增加,负责效应器运动的初级动作皮层的激活呈增加趋势。鉴于此,Nakahara,Doya和Hikosaka(2001)认为动作序列技能学习由两个独立的脑回路控制:感觉回路和动作回路。前者负责对空间信息的快速学习,该学习信息可以在不同效应器中迁移,在学习初期起主导作用;而后者发生相对缓慢,该学习信息无法在效应器中迁移,在学习后期起主导作用。Rand等人(Rand,Hikosaka,Miyachi和Lu等人,1998)在探讨猴子的对侧迁移时发现,训练初期,不仅未训练手完成旧顺序的成绩优于完成新顺序的成绩,而且未训练手完成旧顺序的成绩与训练手完成旧顺序的成绩无差异。由此可以推断,在技能学习的早期阶段,处于激活状态的是感觉回路,此时的动作序列技能以抽象的刺激序列表征,因而可以在不同效应器间迁移,表现出独立于效应器的机制;但当训练进入后期阶段时,猴子未训练手完成旧顺序的成绩优于完成新顺序的成绩,但未训练手完成旧顺序成绩却显著地低于训练手的。因此可以认为,在技能学习的后期阶段,处于激活状态的不仅有感觉回路,还有动作回路,此时仅感觉回路的表征可以在不同效应器间迁移,而动作回路的表征不能迁移。
2.成比例和不成比例迁移(王海玲,2012)
动作序列的成比例迁移是指动作序列的整个部分在一个或多个动作维度(如力量、时间、空间位置)上发生了成比例的变化。而动作序列的不成比例迁移是指动作序列其中一个部分或几个部分在一个或多个动作维度上发生了不成比例的变化。人们经常需要在一定条件下操作一种相似的动作序列,而这种条件又与往常的练习条件不同。这时就需要人们成比例地对习得的动作序列进行调整以适应使用情景的变化。例如,要在文件上签名,就需要将名字笔画控制在有限的空间;而如果要将名字写在黑板上,就需要将它写得大一点。
Wilde等(Wilde和Shea,2006)采用操纵控制杆任务对成比例迁移和不成比例迁移进行研究,测定被试已习得的动作序列向新的空间位置进行迁移的效果。控制杆的末端固定,当呈现刺激序列时,被试需要将控制杆位移到不同位置。在学习阶段,被试分为两组,一组的四个反应位置分别是20°、40°、60°和80°,如图2(a);另外一组是20°、26.67°、60°和 80°。在测试阶段,两组被试的四个反应位置均是20°、26.67°、33.33°和40°,如图2(b)。因此,第一组的动作序列是成比例迁移,第二组的动作序列是不成比例迁移。实验结果显示在长时间的练习中,反应序列会变得越来越具体,以优化动作的产生。在练习1天之后,成比例条件和不成比例条件下的测试都可有效地迁移到新的目标;而练习4天之后的测试发现,被试仅在成比例变化的情况下可发生有效迁移。这说明只有成比例的条件下,经过长时间学习后的具体动作信息才能发生迁移。
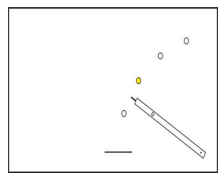
图2(a)
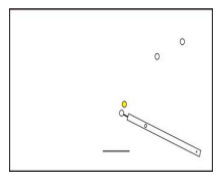
图2(b)
3.相似动作序列学习之间的干扰效应(王海玲,2012)
动作序列学习中一个很重要的现象是相似动作序列间会产生相互干扰。相似动作序列学习中包含两种干扰效应:前摄干扰和后摄干扰。前摄干扰是之前学习过的材料对保持和回忆以后学习的材料的干扰作用。例如熟悉了一种型号键盘的各键位置后就会对新使用的另一型号键盘打字造成干扰。一些情况下,这种影响具有促进作用,因为有经验的打字者同绝对的初学者相比,按键操作更快。当然,前摄干扰也可能具有减弱效应,因为不同位置的按键可能会使操作速度降低或产生错误操作。例如,一些已自动化的单词,像名字或密码,使用不熟悉的键盘进行操作就可能会出现错误。后摄干扰是新信息对已有信息提取方面的影响,例如在用新型号键盘打字一段时间后重新使用旧型号键盘。多数情况下,会产生一种减弱效应。因为一些按键位置的变化可能会导致先前容易的且无错的操作产生错误或速度减慢。
Panzer等人(Panzer,Wilde和Shea,2006)让被试第一天练习含有16个要素的动作序列(S1),第二天练习相似的序列(S2)。第二种序列中的16个要素与第一种序列相比仅有2个要素的位置互换。同时将练习两种序列之间的时间间隔设置为24小时,这样做是为了保证练习S2以前使S1的信息储存更加稳固(根据强化(22-5:动机到行为))假设,24小时可以为人们提供充足的时间和机会去休息以便使信息得到强化,这样可以使序列免于互相干扰。结果显示仅仅练习S1的控制组的绩效优于练习两种序列的实验组对S1的绩效,从而证明后摄干扰的存在。Panzer等(2006)的研究并没有观察到S1对S2造成任何干扰。于是他们得出结论,当学习另一种相似动作序列时,旧动作序列产生的记忆结构会发生改变。
在另外一个实验(Panzer和Shea,2008)中,实验组第一天、第二天练习S1,第三天练习S2。结果发现两天内对第一种序列进行加倍练习后,并不能观察到后摄干扰效应,即额外的练习会避免第一种序列被改变。他们的研究还发现如果两天内对第一种序列进行加倍练习会对第二种序列的学习产生持久的前摄促进效应。为了解释这个发现,他们提出"两种相似动作序列中较强的序列会影响较弱的序列,反之则不会"。