原标题:Drone Detection with Event Cameras
一、背景
随着无人机的普及,安全与防护挑战日益严峻。传统基于帧(Frame-based)的监控系统在探测小型、高速且灵活的无人机时面临三大痛点:运动模糊、动态范围不足(如强光背景或低光环境)以及高数据冗余。
本文系统性地综述了事件相机(Event Camera)作为一种仿生传感器,如何凭借其微秒级的时间分辨率和极高的动态范围(>120dB),为解决这些痛点提供全新路径。事件相机通过异步记录亮度变化,天然过滤了静态背景,实现了对运动目标的高可靠、低延迟感知。
二、融合事件相机:灵光 1 号
论文在探讨未来趋势时明确指出,单一事件相机在缺乏纹理和语义信息的场景下存在局限,**多模态融合(Multi-modal Fusion)**是提升感知鲁棒性的核心。
灵光 1 号 RGB + EVS 视觉融合相机 正是在这一工程背景下形成的产品方案:
它在同一系统中同步获取高质量 RGB 图像与微秒级事件流。这种"双模态"设定既保留了事件相机在高速运动探测与极端光照下的天然优势,又通过 RGB 图像补充了目标的纹理、颜色等语义信息。
通过底层硬件层面的数据同步,灵光 1 号有效地解决了多模态对齐难点,为全天候、全场景的无人机感知提供了更稳定的硬件底座。
注:本文所解读的综述论文旨在探讨事件相机在无人机领域的研究现状,相关实验数据来源于原论文引用的开源数据集,并非基于灵光 1 号硬件开展。
三、方法
数据表示(Data Representation)
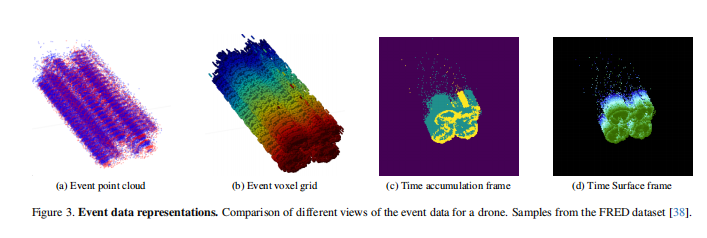
论文探讨了如何将异步稀疏的事件流结构化。重点分析了将事件离散为 4D 体素张量(Voxel Grid) 的方法,该表征方式能最大限度保留时间维度和极性特征,平衡了计算效率与信息完整性。
核心感知任务
-
• 无人机探测与追踪:在复杂背景下实现高帧率边界框预测,并建立连续的运动轨迹。
-
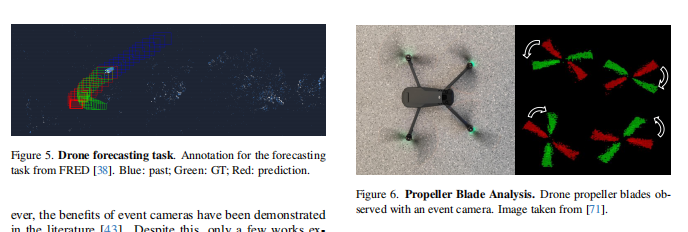
• 螺旋桨特征识别(Propeller Signature):这是本文最具技术深度的亮点。利用事件相机极高的采样率,捕获旋翼旋转产生的高频周期性信号。即使目标在画面中只是一个点,也能通过频率分析将其与飞鸟等干扰物区分开,实现物理级的精准识别。
模型架构演进
论文探讨了从卷积神经网络(CNN)向 脉冲神经网络(SNN) 的演进。利用神经形态硬件处理异步信号,可大幅降低感知延迟和功耗,提升反无人机设备的续航能力。
四、贡献
-
• 系统性框架:首次针对反无人机场景下的事件视觉技术进行了全链条的梳理与评估。
-
• 识别新范式:明确了利用事件相机捕获"旋翼指纹"这一超越传统视觉形状识别的新范式,有效降低了误报率。
-
• 行业指引 :证实了 RGB + EVS 多模态融合 是解决全场景(尤其是识别与重定位)感知的必然趋势。
-
五、总结与展望
《Drone Detection with Event Cameras》不仅展示了事件视觉在极端工况下的性能上限,更指明了感知技术从"模拟成像"向"生物仿生"跨越的必然趋势。对于低空安全领域而言,螺旋桨特征识别与多模态数据对齐将是未来区分实验室研究与工业级产品的关键分水岭。随着灵光 1 号等融合型硬件的成熟,基于事件相机的反无人机系统将真正具备全天候、高鲁棒的实战感知能力,为低空经济的有序发展筑起安全底座。
免责声明
以上内容仅为对学术论文 Drone Detection with Event Cameras 的技术解读,旨在分享前沿科研动态及行业工程应用参考。文中所述技术路径、实验结果及结论均归原作者所有。本解读在部分段落结合了具体的硬件工程实践(如灵光 1 号)进行辅助说明,不代表原论文立场。