3D轨迹提取是连接五轴联动扫描与五轴联动点胶的核心桥梁,也是确保点胶精度的关键环节。其核心工艺目的是从扫描获取的工件实际点云数据中,通过专业算法自动识别出需要点胶的特征边缘、凹槽中心线或预设点胶路径,并将这些特征信息转化为五轴点胶机可直接执行的运动代码,确保点胶轨迹与工件实际形貌精准匹配,从根本上避免因理论轨迹与实际工件偏差导致的点胶缺陷。
光子精密GL-8000系列3D线激光轮廓测量仪采集的高密度、高精度点云数据,是3D轨迹提取的核心基础,为轨迹提取的准确性提供了坚实的几何依据。其数据支撑作用主要体现在特征识别和轨迹生成两个核心环节,二者紧密衔接、缺一不可:
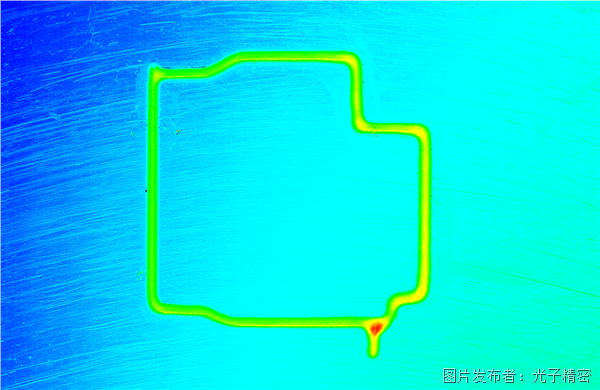
在特征识别环节,专业算法通过分析点云数据的曲率变化、梯度分布和灰度差异,可自动识别出点胶槽的边缘、底部、拐角等关键特征,无需人工干预,实现特征识别的自动化和精准化。针对AI/AR眼镜制造中常见的深槽(深度>2mm),GL-8000专门配备了大角度接收光学系统,可有效避开槽壁的遮挡,确保槽底和槽壁的点云数据完整采集、无遗漏,为深槽点胶轨迹的精准提取提供有力保障。例如,在AR眼镜中框深槽点胶场景中,通过点云曲率分析,可精准定位槽底中心线,确保胶路沿槽底均匀涂布,避免出现胶路偏移、漏胶等问题。
在轨迹生成环节,系统将识别出的特征线转换为符合点胶要求的空间曲线,再通过运动学算法进一步分解为五轴运动的位置数据(X, Y, Z)和姿态数据(A, C轴角度),最终形成五轴点胶机可直接执行的运动指令。以类似的手机刘海屏点胶场景为例,胶阀需与产品平面保持45°夹角以避开周边部件的干涉,这一关键姿态信息,正是通过分析点云的法向矢量精准计算得出的,充分体现了轨迹提取的专业性和精准性,也验证了GL-8000点云数据的可靠性。
针对AI/AR眼镜制造中常见的透明基材(如波导片、透明中框),由于其透光性强、反射信号弱,传统测量设备易出现点云采集模糊、特征边界不清晰的问题,而GL-8000的HDR宽动态模式可有效解决这一痛点。该模式能够同时捕捉透明材质的弱反射信号和胶槽边缘的漫反射信号,通过算法增强特征对比度,确保特征边界清晰可辨,有效避免因透明件导致的特征丢失,保障轨迹提取的可靠性和准确性。