Part II 4-6
-
- [4. GaussianCAD:从设计表达进入结构化几何](#4. GaussianCAD:从设计表达进入结构化几何)
-
- [4.1 问题重定义:3DGS 开始处理工程设计表达](#4.1 问题重定义:3DGS 开始处理工程设计表达)
- [4.2 为什么三视图工程草图是一个特殊的 sparse-view reconstruction 问题](#4.2 为什么三视图工程草图是一个特殊的 sparse-view reconstruction 问题)
-
- [4.2.1 第一重差异:投影模型不同](#4.2.1 第一重差异:投影模型不同)
- [4.2.2 第二重差异:输入本身就是设计约束表达](#4.2.2 第二重差异:输入本身就是设计约束表达)
- [4.3 GaussianCAD 的方法链路:草图增广、位姿先验、visual hull 初始化与 3DGS 优化](#4.3 GaussianCAD 的方法链路:草图增广、位姿先验、visual hull 初始化与 3DGS 优化)
-
- [4.3.1 第一步:Sketch Augmentation](#4.3.1 第一步:Sketch Augmentation)
- [4.3.2 第二步:Camera Pose Localization](#4.3.2 第二步:Camera Pose Localization)
- [4.3.3 第三步:Sparse-view CAD Reconstruction](#4.3.3 第三步:Sparse-view CAD Reconstruction)
- [4.3.4 统一目标形式](#4.3.4 统一目标形式)
- [4.4 这条路线说明了什么:3DGS 首次接触"设计语言"](#4.4 这条路线说明了什么:3DGS 首次接触“设计语言”)
- [4.5 关于低秩约束、核范数与平面先验:需要明确区分"论文原文"与"理论延伸"](#4.5 关于低秩约束、核范数与平面先验:需要明确区分“论文原文”与“理论延伸”)
-
- [4.5.1 低秩结构](#4.5.1 低秩结构)
- [4.5.2 平面与解析面先验](#4.5.2 平面与解析面先验)
- [4.6 方法边界:它仍不是通用工业 CAD 反求](#4.6 方法边界:它仍不是通用工业 CAD 反求)
- [4.7 阶段性结论](#4.7 阶段性结论)
- [5. NURBS / 自由曲面:理论延伸与未来挑战](#5. NURBS / 自由曲面:理论延伸与未来挑战)
-
- [5.1 这一节讨论的是"尚未真正打通的技术高地"](#5.1 这一节讨论的是“尚未真正打通的技术高地”)
- [5.2 NURBS 的数学定义:它为什么长期占据工业 CAD 核心地位](#5.2 NURBS 的数学定义:它为什么长期占据工业 CAD 核心地位)
- [5.3 真正的难点不只是拟合控制点,而是恢复"参数化曲面系统"](#5.3 真正的难点不只是拟合控制点,而是恢复“参数化曲面系统”)
- [5.4 从高斯表示走向 NURBS 的五重困难](#5.4 从高斯表示走向 NURBS 的五重困难)
-
- [5.4.1 参数域分配问题](#5.4.1 参数域分配问题)
- [5.4.2 patch segmentation 问题](#5.4.2 patch segmentation 问题)
- [5.4.3 control lattice estimation 与 knot placement 问题](#5.4.3 control lattice estimation 与 knot placement 问题)
- [5.4.4 fairness / smoothness 问题](#5.4.4 fairness / smoothness 问题)
- [5.4.5 trimming boundary recovery 问题](#5.4.5 trimming boundary recovery 问题)
- [5.5 为什么自由曲面 / trimmed NURBS 仍是当前路线最难跨过去的一层](#5.5 为什么自由曲面 / trimmed NURBS 仍是当前路线最难跨过去的一层)
- [5.6 结论](#5.6 结论)
- [6. Point2CAD:作为必要对照组的经典几何逆向链路](#6. Point2CAD:作为必要对照组的经典几何逆向链路)
-
- [6.1 为什么 Point2CAD 是理解 BrepGaussian 之前最重要的对照组](#6.1 为什么 Point2CAD 是理解 BrepGaussian 之前最重要的对照组)
- [6.2 Point2CAD 揭示了什么:CAD reconstruction 是约束链条,不是并列模块拼装](#6.2 Point2CAD 揭示了什么:CAD reconstruction 是约束链条,不是并列模块拼装)
- [6.3 Point2CAD 的判断:解析面正确,并不等于后续装配简单](#6.3 Point2CAD 的判断:解析面正确,并不等于后续装配简单)
- [6.4 Point2CAD 与 Gaussian 路线的本质关系:不是替代,而是参照](#6.4 Point2CAD 与 Gaussian 路线的本质关系:不是替代,而是参照)
- [6.5 为什么 Point2CAD 会成为 BrepGaussian 的必要背景板](#6.5 为什么 Point2CAD 会成为 BrepGaussian 的必要背景板)
- [6.6 这对图像到 CAD 路线意味着什么](#6.6 这对图像到 CAD 路线意味着什么)
- [6.7 阶段性结论](#6.7 阶段性结论)
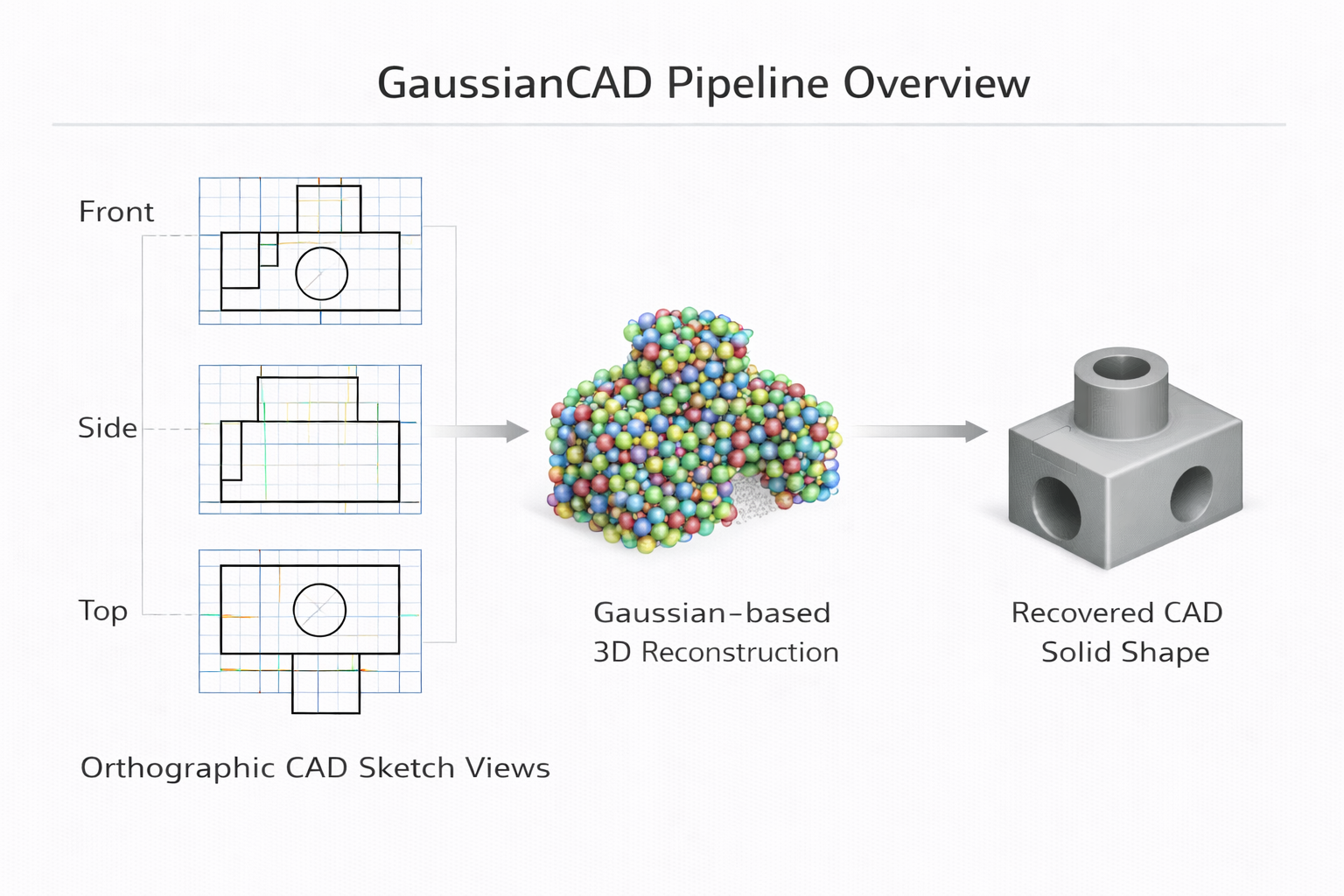
4. GaussianCAD:从设计表达进入结构化几何
4.1 问题重定义:3DGS 开始处理工程设计表达
GaussianCAD 的关键意义,不在于"又换了一个 3DGS 的 loss",而在于它把 3DGS 引入了一个此前并不以自然图像为中心的场景:从三视图正交工程草图恢复 3D CAD 模型。论文将任务定义为:从包含三个正交视图的栅格 CAD 草图中,恢复对应的 3D CAD 模型。
这件事的本质,并不只是输入模态变化,而是问题语义发生了切换。在自然图像重建中,系统面对的是纹理、材质、光照、遮挡与透视投影;而在工程草图重建中,系统面对的是轮廓、可见边、几何特征与设计规则。换句话说,输入不再是"这个物体看起来像什么",而是"这个设计表达在几何上意味着什么"。
从表示论角度看,natural image 更接近一个由辐射、遮挡、材质和视角共同生成的观测场;而 CAD sketch 更接近一个被设计规则压缩后的几何投影符号场。前者包含大量 appearance redundancy,后者几乎只保留 shape-critical signal。
因此,GaussianCAD 真正面对的,不是普通的模态迁移,而是一个更本质的问题:
如何把原本为"照片---辐射---视图一致性"设计的 3DGS,迁移到"草图---轮廓---设计一致性"的输入域中。
论文本身也明确强调,CAD sketches 与 natural images 不同:它们主要由 contours 和 geometric features 构成,没有材质与纹理信息,而且工程理解依赖更强的几何解释能力。这说明 3DGS 在这里第一次开始接触 engineering drawing semantics,而不再只是做自然场景的新视图合成或稀疏视角重建。
若借一个直观比喻来理解:照片像一段包含大量噪声与细节的原始录音,而工程草图更像一份只保留主旋律骨架的五线谱。前者信息量大但解释复杂,后者信息量小但结构极强。GaussianCAD 的真正价值,就在于它试图证明:
3DGS 不仅能"听懂录音",也开始尝试"读懂乐谱"。
4.2 为什么三视图工程草图是一个特殊的 sparse-view reconstruction 问题
GaussianCAD 的一个非常重要的判断是:CAD reconstruction can be viewed as a special case of sparse-view reconstruction。这不是修辞,而是方法设计的逻辑前提。
从几何上看,三视图正交草图与自然 sparse-view 图像有两个根本差异。
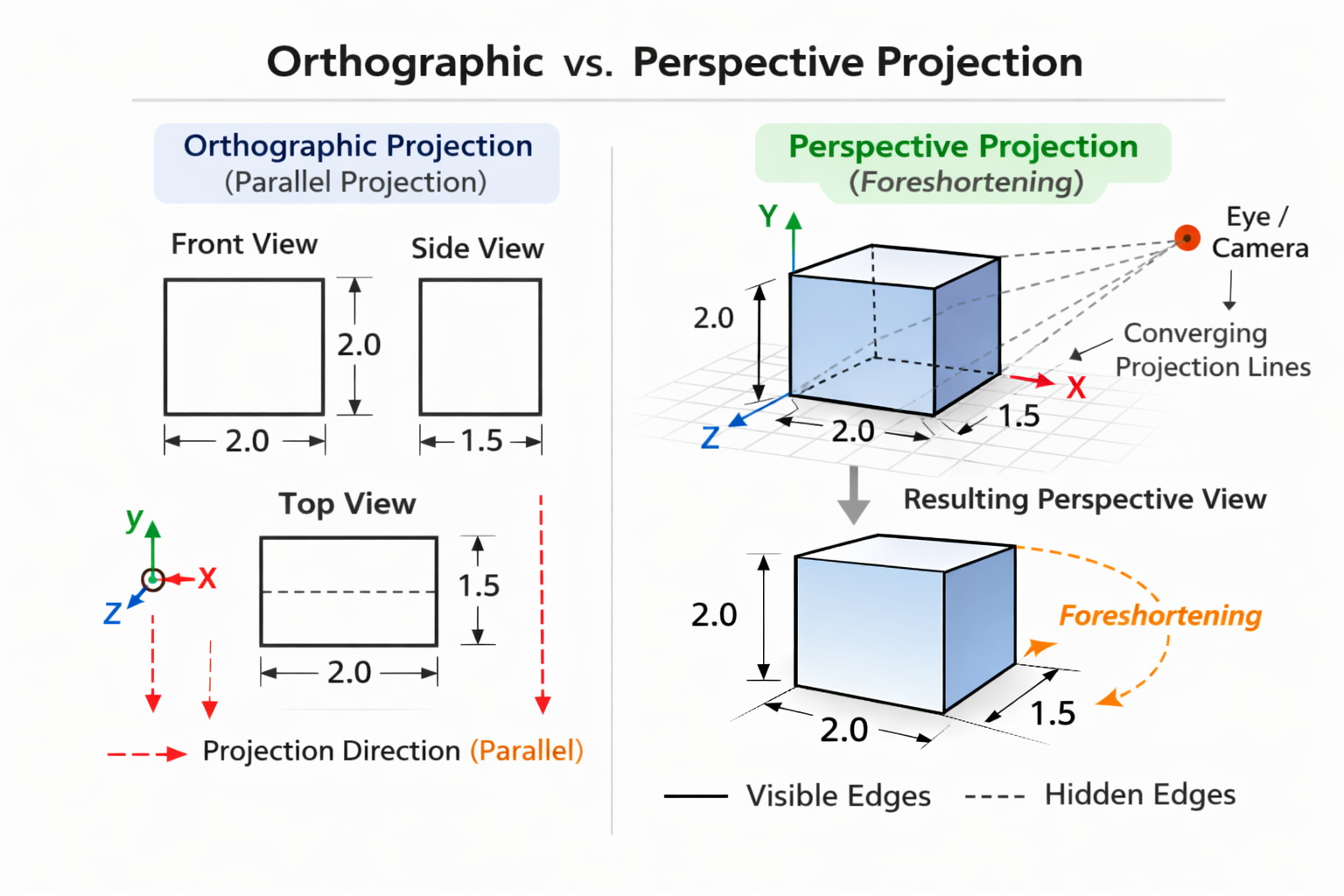
4.2.1 第一重差异:投影模型不同
工程草图使用的是 orthographic projection ,而不是透视投影。若把一个 3D 点 x = ( x , y , z ) ⊤ \mathbf{x}=(x,y,z)^\top x=(x,y,z)⊤ 投到三视图中的某一视图,其投影关系可近似写为
u = P ortho x + t , (21) \mathbf{u} = P_{\text{ortho}}\mathbf{x} + \mathbf{t}, \tag{21} u=Porthox+t,(21)
其中 P ortho P_{\text{ortho}} Portho 本质上是一个删去视线方向分量的线性映射,而不是 pinhole camera 中包含透视除法的非线性投影。
例如:
正视图可写为
π f ( x , y , z ) = ( x , y ) , (22) \pi_f(x,y,z) = (x,y), \tag{22} πf(x,y,z)=(x,y),(22)
侧视图可写为
π s ( x , y , z ) = ( z , y ) , (23) \pi_s(x,y,z) = (z,y), \tag{23} πs(x,y,z)=(z,y),(23)
俯视图可写为
π t ( x , y , z ) = ( x , z ) . (24) \pi_t(x,y,z) = (x,z). \tag{24} πt(x,y,z)=(x,z).(24)
因此,深度不会以"近大远小"的形式编码在图像里。这意味着许多自然图像重建中依赖的透视几何线索,在这里根本不存在。
4.2.2 第二重差异:输入本身就是设计约束表达
三视图 CAD 草图通常是设计约束表达,而不是单纯观测结果。论文明确指出,三视图 orthographic sketches 在理论上可以唯一决定一个 3D CAD 模型,这在一定程度上缓解了自然 sparse-view reconstruction 中的严重歧义。
但这里必须说得更严谨一些:所谓"唯一决定",并不是说三视图输入在任何条件下都绝对无歧义,而是说:
在遵守工程制图规则、视图对齐规则、线型语义与对象合法性的前提下,解空间被大幅压缩。
从逆问题角度看,natural sparse-view reconstruction 的 ill-posedness 主要来自观测不足;而 orthographic CAD reconstruction 的困难,则更多来自:
符号稀疏,但结构高约束。
也就是说,这里的问题不是"数据太少",而是"可用数据几乎全是结构信号"。
若用集合交的方式来理解,一个三维形体 Ω ⊂ R 3 \Omega\subset\mathbb{R}^3 Ω⊂R3 在三视图中的轮廓可定义为三个 silhouette sets:
S f , S s , S t . (25) S_f,\;S_s,\;S_t. \tag{25} Sf,Ss,St.(25)
则所有与三视图轮廓一致的候选体可形成一个约束集合
C = { Ω ∣ π f ( Ω ) ⊆ S f , π s ( Ω ) ⊆ S s , π t ( Ω ) ⊆ S t } . (26) \mathcal{C}=\{\Omega\mid \pi_f(\Omega)\subseteq S_f,\ \pi_s(\Omega)\subseteq S_s,\ \pi_t(\Omega)\subseteq S_t\}. \tag{26} C={Ω∣πf(Ω)⊆Sf, πs(Ω)⊆Ss, πt(Ω)⊆St}.(26)
三视图工程草图的作用,本质上就是把三维候选集合 C \mathcal{C} C 压缩到一个非常小的可行域。
因此,这里的"稀疏视角"不能简单理解为"视图少",而应理解为:
输入视图虽然少,但投影规则更强,设计约束更显式,几何歧义结构与自然图像显著不同。 如果说自然图像重建更像"从几张生活照猜一件物体的真实样子",那么三视图工程草图更像"从三张标准投影图解一道几何构型题"。后者信息通道更窄,但每一笔都更接近约束,而不是纹理装饰。
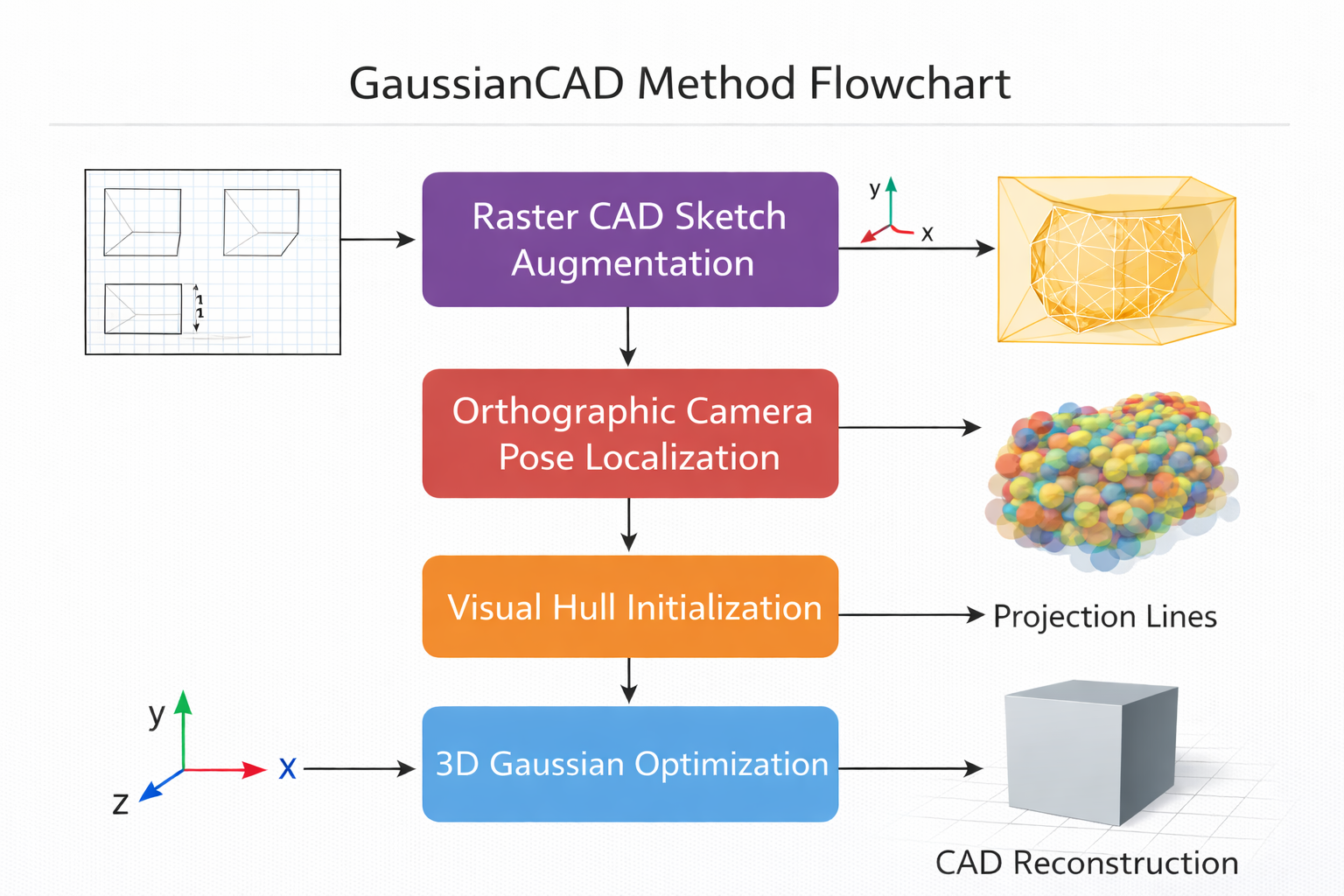
4.3 GaussianCAD 的方法链路:草图增广、位姿先验、visual hull 初始化与 3DGS 优化
GaussianCAD 的方法流程可以概括为三步,接下来对该类问题结构的逐层拆解。
4.3.1 第一步:Sketch Augmentation
论文先对栅格 CAD 草图做过滤与增强,包括检测边缘、去除虚线、提取 mask,并将前景进行颜色化,使其更接近 natural image-like representation。
这样做的目的,不是为了"美化草图",而是为了把极其稀薄的线条监督,转换成更适合现有 3D 重建框架消费的输入形式。
从优化角度看,原始工程草图中的线条是高度稀疏的。若直接作为 supervision,渲染误差对高斯参数的梯度会非常稀薄且不稳定。把前景区域 colorize 并配合 mask 提取,相当于把"只在边界上非零"的监督,变成"在前景区域上更连续分布"的监督,从而改善梯度传播条件。
这本质上是在做 loss landscape smoothing:为了改善其数值可优化性。
4.3.2 第二步:Camera Pose Localization
由于 CAD 草图不具备自然图像中的纹理特征,常规 SfM / pose estimation 难以直接适用,因此论文直接基于三视图之间的相对位置先验,手工计算 orthographic views 的 camera poses。
这一点说明在工程设计表达场景下,位姿不再是"从图像估计"的对象,而更多是"由设计制图规则推定"的对象。
更深一层地说,这里把 pose 从未知变量中剥离出来,实际上是在减少联合优化中的 gauge freedom。若同时未知 shape 与 pose,则目标函数常会出现多组等价解;而当三视图的相对方位被制图规范固定后,系统不再需要在"几何解释错误"与"相机姿态错误"之间来回妥协。
这一步是在:主动降低问题条件数。
4.3.3 第三步:Sparse-view CAD Reconstruction
GaussianCAD 采用 GaussianObject 作为稀疏视图 3DGS 重建基座,但针对 CAD sketches 做了有针对性的裁剪:
- 保留基于 visual hull 的高斯初始化与初始优化流程;
- 去掉依赖 Stable Diffusion、LoRA、ControlNet 与 depth loss 的部分。
它保留了几何上最关键的初始化环节,去掉了那些更适合自然图像修复的外部视觉先验。
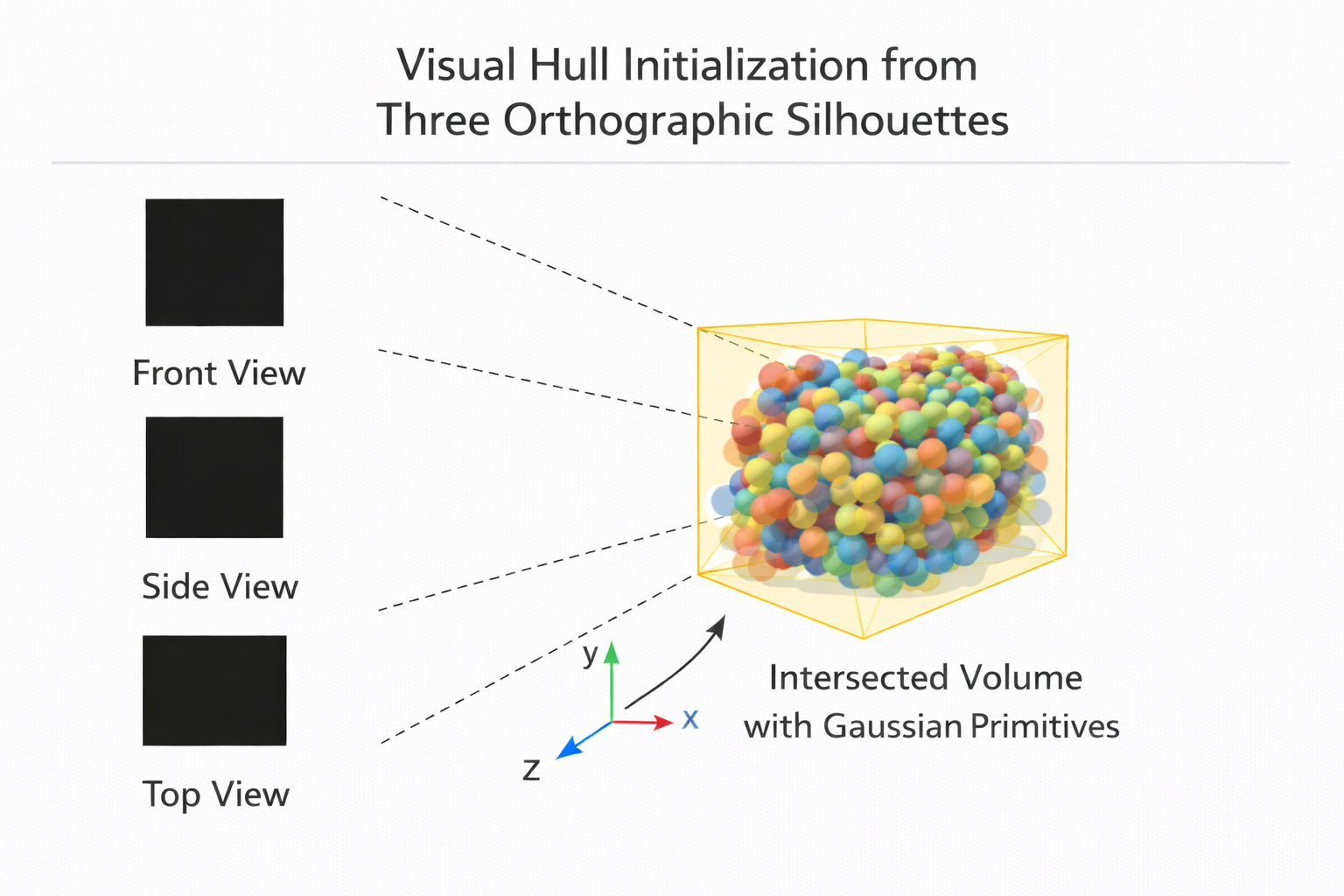
这里的 visual hull 尤其值得深挖。设第 k k k 个视图对应前景轮廓区域 S k S_k Sk,其反投影可写为广义视锥体
V k = π k − 1 ( S k ) . (27) V_k = \pi_k^{-1}(S_k). \tag{27} Vk=πk−1(Sk).(27)
则由多视图轮廓构造的 visual hull 定义为
V hull = ⋂ k = 1 K V k . (28) V_{\text{hull}} = \bigcap_{k=1}^{K} V_k. \tag{28} Vhull=k=1⋂KVk.(28)
它是所有与各视图 silhouette 一致的三维体的最大保守近似之一。
对于三视图正交草图而言,这一步几乎是最自然的几何初始化,因为草图首先给出的就是轮廓约束,而不是纹理约束。将 3D Gaussians 初始化在 V hull V_{\text{hull}} Vhull 上或其邻域内,相当于把后续优化一开始就限制在一个 silhouette-feasible 的可行域附近。
这一步的相当于给优化问题做了"投影到可行集"的预处理。若没有这一步,Gaussians 的初始分布会高度自由,优化过程很容易在大量 silhouette-inconsistent 的假解附近徘徊。对工程草图这类弱外观、强轮廓输入来说,visual hull 是一个几何先验支柱性操作。
4.3.4 统一目标形式
若用统一目标来概括,其优化过程可写为
min Θ G L color + λ 1 L mask + λ 2 L reg , (29) \min_{\Theta_G}\ \mathcal{L}{\text{color}}+\lambda_1 \mathcal{L}{\text{mask}}+\lambda_2 \mathcal{L}_{\text{reg}}, \tag{29} ΘGmin Lcolor+λ1Lmask+λ2Lreg,(29)
其中:
- Θ G \Theta_G ΘG 表示高斯参数集;
- L color \mathcal{L}_{\text{color}} Lcolor 约束重建结果与颜色化草图的一致性;
- L mask \mathcal{L}_{\text{mask}} Lmask 约束重建结果与前景 mask 的轮廓一致性;
- L reg \mathcal{L}_{\text{reg}} Lreg 可代表协方差、透明度、密度控制等高斯表示常见正则项。
它把三视图工程草图成功转写为一个可由 3DGS 消费、且在数值上更可优化的自监督问题。
更进一步,如果把每个高斯写为
G i = ( μ i , Σ i , α i , c i ) , (30) G_i = (\mu_i,\Sigma_i,\alpha_i,c_i), \tag{30} Gi=(μi,Σi,αi,ci),(30)
则它在 CAD 场景中的角色已经悄然变化:
- 在自然场景中,高斯更像局部辐射---体密度代理;
- 在工程草图场景中,高斯越来越像轮廓一致的中间几何粒子。
也就是说,外表还是 3DGS,语义却开始向 structured geometry surrogate 偏移。
4.4 这条路线说明了什么:3DGS 首次接触"设计语言"
GaussianCAD 的价值在于它证明了:
3DGS 不再只是服务于真实照片,也开始尝试承接设计表达输入。
工程系统中的几何信息源并不总是实景图像。它还可能来自:
- 正交三视图草图;
- 规范化机械制图;
- DSL/程序化草图;
- 半结构化设计约束表达;
- 历史 CAD 图纸与扫描草图。
一旦 3DGS 开始进入这个输入域,它所面对的就不再只是 photometric consistency,而是:
- projection prior;
- symbolic structure;
- visible/invisible edge semantics;
- 更强的 engineering interpretation。
值得强调的是:
设计语言不是"外观更简单的图片",而是"规则先于观测"的几何表达。
例如,在工程制图中,实线、虚线、中心线、剖切线都具有不同语义;同一条二维线段,在设计语言里可能对应真实交线、遮挡轮廓、对称轴或尺寸辅助线。
哪怕 GaussianCAD 当前还没有全面显式建模这些符号语义,它至少已经迈出了第一步:让 3DGS 不再只接受"看起来像照片的东西",而开始接受"看起来像规则系统的东西"。
因此,GaussianCAD 的方法学意义可以概括为一句话:
它不是把 3DGS 用在 CAD 上,而是把 3DGS 推向了"设计语言输入"的方向。
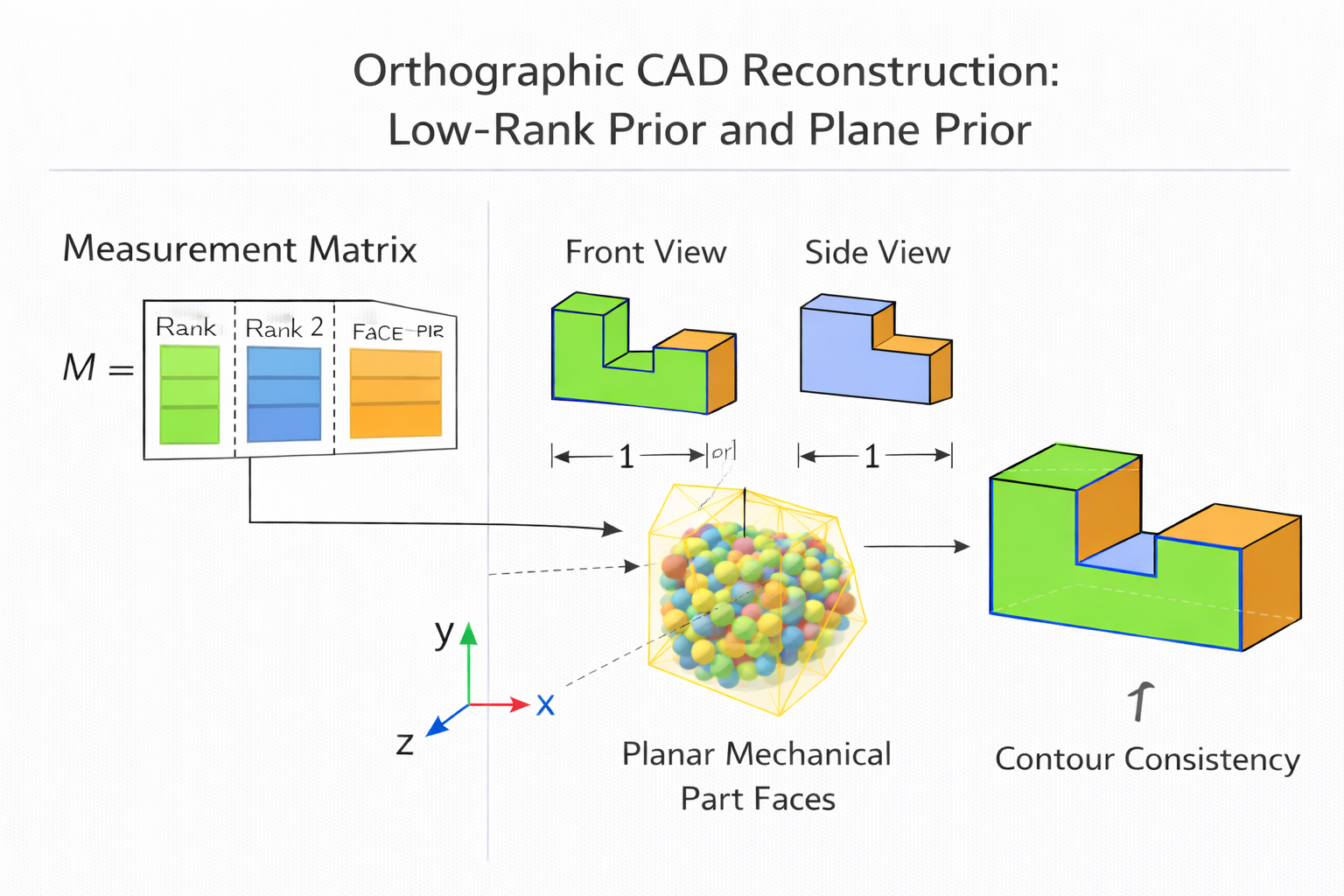
4.5 关于低秩约束、核范数与平面先验:需要明确区分"论文原文"与"理论延伸"
这里必须非常严格地区分两件事:
第一,GaussianCAD 原论文公开方法并没有显式引入 nuclear norm minimization,也没有显式构造 plane prior optimization 。
第二,下面的讨论是对"正交三视图 CAD 恢复"这一问题结构的理论延伸,不是对论文方法的直接复述。
4.5.1 低秩结构
在理想正交投影模型下,若把多视图观测组织成 measurement matrix W W W,则很多经典刚体形状恢复问题都可写成
W = R S , (31) W = RS, \tag{31} W=RS,(31)
其中 R R R 为观测矩阵, S S S 为形状矩阵。
在理想条件下, W W W 的秩满足
r a n k ( W ) ≤ 3. (32) \mathrm{rank}(W)\leq 3. \tag{32} rank(W)≤3.(32)
于是,核范数
∥ W ∥ ∗ = ∑ i σ i ( W ) (33) \|W\|_*=\sum_i \sigma_i(W) \tag{33} ∥W∥∗=i∑σi(W)(33)
可以视为 rank 的凸替代,从而把"跨视图结构一致性"表达为一种低秩先验。
这一点背后的几何含义是:当投影是正交的、对象是刚性的、多视图之间只存在固定观察方向切换时,三维结构在二维观测矩阵中的自由度远小于表面看上去的像素自由度。
也就是说,观测虽然是二维的,但它们并不是彼此独立的,而是被同一个三维对象耦合起来。低秩先验的本质,就是把:
"同一物体的多个视图必须共享同一组潜在三维自由度" 这一事实显式化。
4.5.2 平面与解析面先验
工程物体中大量面是平面、圆柱面、圆锥面或其他 canonical surfaces。若对平面施加先验,则一个平面可写为
π ⊤ x + d = 0 , (34) \pi^\top \mathbf{x}+d=0, \tag{34} π⊤x+d=0,(34)
其中 π \pi π 为法向量, d d d 为偏置项。
若点集 { x n } n = 1 N \{\mathbf{x}n\}{n=1}^{N} {xn}n=1N 属于同一平面,则有
∑ n = 1 N ( π ⊤ x n + d ) 2 (35) \sum_{n=1}^{N} (\pi^\top \mathbf{x}_n + d)^2 \tag{35} n=1∑N(π⊤xn+d)2(35)
可作为平面一致性残差。
对于正交视图恢复任务,大量轮廓、共线关系、平面边界与轮廓投影都天然适合被这类解析约束吸收。
因此,从问题结构上说,三视图 CAD 恢复天然更接近:
"低秩 + 平面/解析面 + 轮廓一致"
的结构化几何问题。GaussianCAD 虽未显式走这一路,但它实际上把 3DGS 带到了这条轨道的入口。
4.6 方法边界:它仍不是通用工业 CAD 反求
尽管 GaussianCAD 很有信号价值,但它的边界也必须说清楚。
首先,它当前主要面向 Sub-Fusion360 上的三视图草图场景,输入受正交投影与视图规范约束较强,并不等价于"任意设计图到通用 CAD"。
其次,论文实验数据明确说明:Shapes containing B-splines were excluded。这意味着其当前验证空间主要集中在较受限的 CAD 形体分布上,而不是完整覆盖高复杂度自由曲面工业模型。
再次,它当前输出本质上仍是基于 3DGS 的重建结果,并主要以点云距离类指标进行评估。这与工业级可编辑资产之间,仍隔着:
- 曲面参数化;
- trim boundary recovery;
- 拓扑合法性验证;
- STEP/B-rep 交付;
"重建得像"与"表达得对"不是一回事。 一个几何结果可以在 Chamfer Distance 上很好,却仍然不具备:
- 面级解析参数化;
- 可编辑边界;
- 合法 trim loops;
- 稳定的 face--edge--vertex incidence;
- 下游 CAD/CAM/CAE 可消费的数据结构。
如果借用一个直观比喻:GaussianCAD 当前更像是把"工程草图"翻译成了一幅高质量三维雕塑;而工业 CAD/B-rep 需要的,却是把它翻译成一套可以被机床、仿真器、几何内核和装配系统共同理解的"法律文本"。
前者要求形状逼真,后者要求条文严密。两者不在一个难度层级上。
所以,GaussianCAD 的正确定位应该是:
- 它是 3DGS 进入工程设计表达域 的关键试探;
- 它适合作为 设计表达理解与受限 CAD 恢复 的预研基线;
- 它还不能被误判为"已经实现全面工业级 CAD/B-rep 恢复"。
4.7 阶段性结论
GaussianCAD 的意义,大于其短期几何完备性。
它真正说明的是:当输入不再是照片,而是设计语言时,Gaussian 优化就不能只依赖自然图像经验,而必须接受更强的:
- orthographic projection prior
- camera pose prior
- 结构化几何解释链路
从算法架构角度看,它至少完成了三件事:
- 把 CAD reconstruction 重新解释为一种特殊 sparse-view reconstruction;
- 把轮廓约束通过 visual hull 转化为 3DGS 的可行初始化;
- 把原本服务于照片的 Gaussian 优化,推进到了"可消费设计表达"的前沿边界。
因此,GaussianCAD 不是终点:3DGS 生态开始从"观测世界"走向"理解设计"。
5. NURBS / 自由曲面:理论延伸与未来挑战
5.1 这一节讨论的是"尚未真正打通的技术高地"
当前公开路线,无论是 GaussianCAD、Point2CAD,还是更广义的 Gaussian-to-geometry 方法,大多都没有完成"从多视图图像或 Gaussian 表示,端到端恢复工业级 trimmed NURBS 并输出 legal B-rep"的完整闭环。
换句话说,这里没有"现成可交付方案",只是讨论下:
工程语义上探过程中最核心、最艰难、也最有战略价值的下一层问题。
从系统工程角度说,primitive-level recovery 解决的是"形状看起来对不对",而 trimmed NURBS + legal B-rep 解决的是"这个对象能不能进入工业生命周期"。
这两者之间,不是一个 refinement gap,而是一个 representation regime shift:
- 前者关心几何近似;
- 后者关心参数化、裁切、拼接、拓扑合法性与交换标准兼容性。
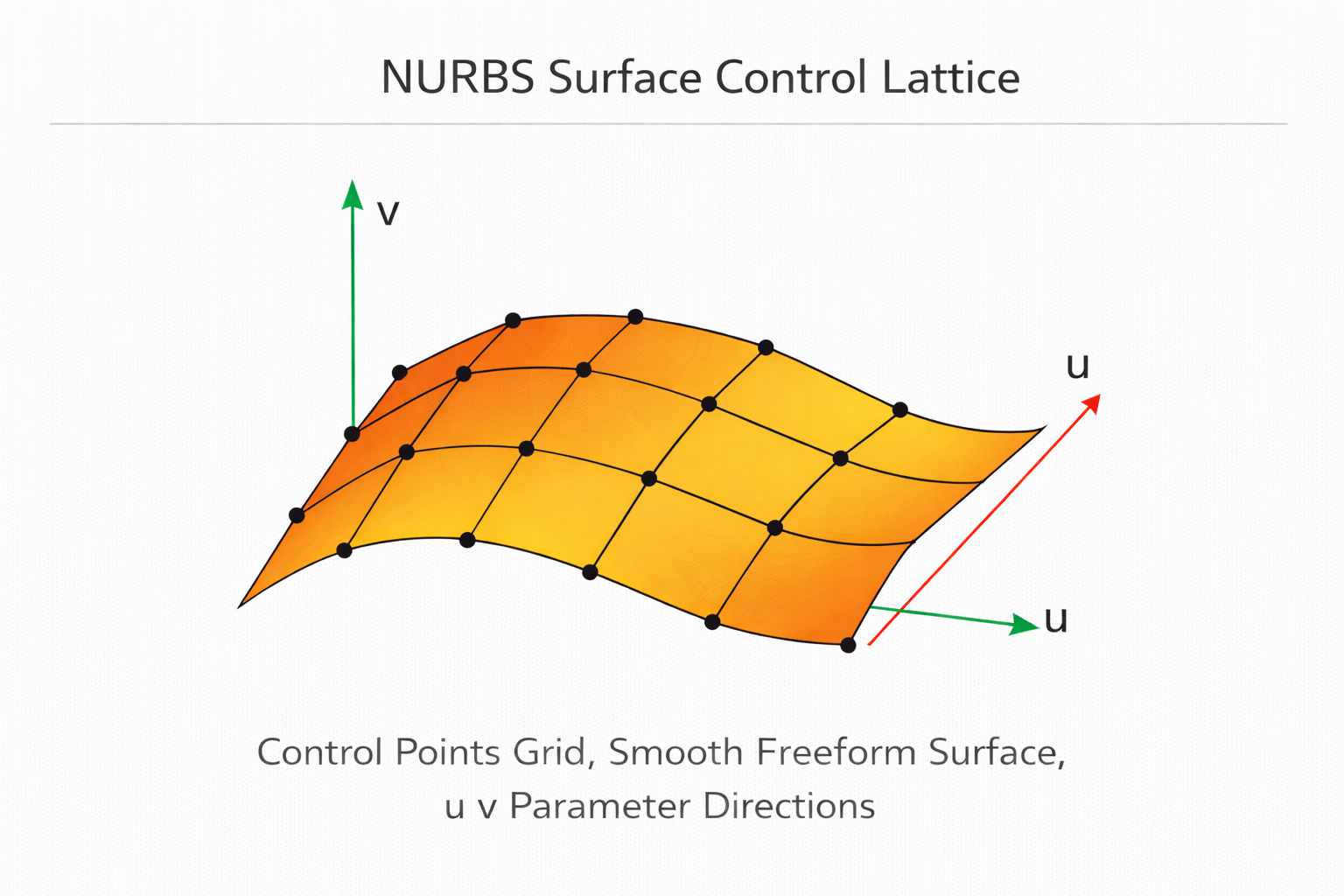
5.2 NURBS 的数学定义:它为什么长期占据工业 CAD 核心地位
NURBS 曲面可写为
S ( u , v ) = ∑ i ∑ j N i , p ( u ) N j , q ( v ) w i j P i j ∑ i ∑ j N i , p ( u ) N j , q ( v ) w i j , (36) S(u,v)= \frac{\sum_i\sum_j N_{i,p}(u)N_{j,q}(v)w_{ij}P_{ij}} {\sum_i\sum_j N_{i,p}(u)N_{j,q}(v)w_{ij}}, \tag{36} S(u,v)=∑i∑jNi,p(u)Nj,q(v)wij∑i∑jNi,p(u)Nj,q(v)wijPij,(36)
其中:
- P i j P_{ij} Pij 是控制点;
- w i j w_{ij} wij 是权重;
- N i , p ( u ) , N j , q ( v ) N_{i,p}(u),N_{j,q}(v) Ni,p(u),Nj,q(v) 是 B-spline 基函数;
- 节点向量决定基函数支撑区间与拼接结构。
一维 B-spline 基函数满足 Cox--de Boor 递推:
N i , 0 ( u ) = { 1 , u i ≤ u < u i + 1 , 0 , otherwise , (37) N_{i,0}(u)= \begin{cases} 1,& u_i\le u<u_{i+1},\\ 0,& \text{otherwise}, \end{cases} \tag{37} Ni,0(u)={1,0,ui≤u<ui+1,otherwise,(37)
以及
N i , p ( u ) = u − u i u i + p − u i N i , p − 1 ( u ) + u i + p + 1 − u u i + p + 1 − u i + 1 N i + 1 , p − 1 ( u ) . (38) N_{i,p}(u)= \frac{u-u_i}{u_{i+p}-u_i}N_{i,p-1}(u) + \frac{u_{i+p+1}-u}{u_{i+p+1}-u_{i+1}}N_{i+1,p-1}(u). \tag{38} Ni,p(u)=ui+p−uiu−uiNi,p−1(u)+ui+p+1−ui+1ui+p+1−uNi+1,p−1(u).(38)
若记
S ~ ( u , v ) = ∑ i ∑ j N i , p ( u ) N j , q ( v ) w i j P i j , W ( u , v ) = ∑ i ∑ j N i , p ( u ) N j , q ( v ) w i j , (39) \tilde{S}(u,v)=\sum_i\sum_j N_{i,p}(u)N_{j,q}(v)w_{ij}P_{ij},\qquad W(u,v)=\sum_i\sum_j N_{i,p}(u)N_{j,q}(v)w_{ij}, \tag{39} S~(u,v)=i∑j∑Ni,p(u)Nj,q(v)wijPij,W(u,v)=i∑j∑Ni,p(u)Nj,q(v)wij,(39)
则
S ( u , v ) = S ~ ( u , v ) W ( u , v ) . (40) S(u,v)=\frac{\tilde{S}(u,v)}{W(u,v)}. \tag{40} S(u,v)=W(u,v)S~(u,v).(40)
这一有理形式的意义在于:通过权重 w i j w_{ij} wij,NURBS 可以精确表示圆、圆锥曲线以及许多传统多项式样条难以精确表达的几何对象。
这也是为什么工业 CAD 长期选择 NURBS 作为核心曲面表示之一:它既有 spline 的局部支撑和可编辑性,又有 rational form 带来的高表达能力。
更重要的是,NURBS 不是"一个能拟合复杂表面的函数"这么简单,它是一个天然带参数域的可操作几何对象。对 CAD 系统来说,参数域不是附属信息,而是后续一切操作的入口,包括:
- 等参数曲线提取;
- 法向、曲率和导数计算;
- 曲面求交;
- trim curve 定义;
- 曲面拼接;
- 映射、展开、偏置与制造路径生成。
若求一阶导数,可写为
S u = S ~ u W − S ~ W u W 2 , S v = S ~ v W − S ~ W v W 2 , (41) S_u = \frac{\tilde{S}_u W - \tilde{S} W_u}{W^2},\qquad S_v = \frac{\tilde{S}_v W - \tilde{S} W_v}{W^2}, \tag{41} Su=W2S~uW−S~Wu,Sv=W2S~vW−S~Wv,(41)
于是法向可由
n ( u , v ) = S u × S v ∥ S u × S v ∥ (42) \mathbf{n}(u,v)=\frac{S_u\times S_v}{\|S_u\times S_v\|} \tag{42} n(u,v)=∥Su×Sv∥Su×Sv(42)
得到。
再进一步进入二阶导数,便可构造第一、第二基本形式,进而得到主曲率、平均曲率与高斯曲率。这意味着 NURBS 不是只有"外形",而是内含一整套微分几何工具链。
这类表示长期成为工业 CAD 核心是因为它同时具备以下性质:
- 能统一表示多项式曲线、圆锥曲线与自由曲面;
- 具备局部支撑,便于局部编辑;
- 便于控制连续性与拼接光顺性;
- 适合制造、交换与下游仿真系统消费;
- 可作为 B-rep 几何层中的标准曲面对象。
从工程系统角度看,NURBS 的地位并不只是"表达更强",而是"它可被 CAD/CAM/CAE 全链路消费"。这就是为什么只要谈到真正工业级可编辑几何,就绕不开 NURBS 与 trimmed surfaces。
5.3 真正的难点不只是拟合控制点,而是恢复"参数化曲面系统"
很多讨论会误把 NURBS 恢复理解成"从点拟合一个曲面",但这显然低估问题复杂度。
因为一个可用的 NURBS 曲面系统,至少同时包含以下几层对象:
- 曲面形状本身;
- 参数域 ( u , v ) (u,v) (u,v) 的分配与几何解释;
- 控制点网格与节点向量;
- patch 之间的分割与拼接关系;
- trimming curves 与有效子域;
- 最终进入 B-rep 的边---面---角点关系。
这意味着,从 Gaussian 点集、点云采样或 patch feature 出发,真正要恢复的不是单一曲面,而是: 带参数域、带裁切、带拼接、带合法性约束的曲面系统。
这里的核心难点可以概括为一句话:NURBS 曲面不是一个二维函数图像,而是一套"形状---参数---拓扑"三位一体的对象。 只恢复其中任意一层,都不等于真正恢复了工业语义。更形式化地说,若把一块自由曲面 patch 看作三元组
P = ( S , Ω , Γ ) , (43) \mathcal{P}=(S,\Omega,\Gamma), \tag{43} P=(S,Ω,Γ),(43)
其中:
- S : Ω → R 3 S:\Omega\rightarrow\mathbb{R}^3 S:Ω→R3 是参数曲面映射;
- Ω ⊂ R 2 \Omega\subset\mathbb{R}^2 Ω⊂R2 是参数域;
- Γ \Gamma Γ 是定义在参数域边界或内部的 trim curves。
则真正要恢复的不是单独的 S S S,而是整个 P \mathcal{P} P。而当多个 patch 组成 B-rep 时,还需进一步恢复 patch 间的邻接与一致性:
B = ( { P k } , E , V , I , A ) , (44) \mathcal{B}=(\{\mathcal{P}_k\}, E, V, \mathcal{I}, \mathcal{A}), \tag{44} B=({Pk},E,V,I,A),(44)
其中:
- E E E 为边;
- V V V 为角点;
- I \mathcal{I} I 为 incidence;
- A \mathcal{A} A 为 adjacency。
从这个角度看,单纯"把点拟合成一张平滑曲面"其实只解决了最外层的一层皮,而真正的工业几何对象更像一座建筑:
- 曲面只是墙面;
- 参数域是施工坐标网;
- trim curves 是门窗洞口;
- 拓扑关系是承重结构图。
你不能只有墙,而没有坐标、门窗和结构节点。
5.4 从高斯表示走向 NURBS 的五重困难
若把问题写实一点,那么从 Gaussian / patch feature / implicit field 走向 trimmed NURBS,有五重困难。
5.4.1 参数域分配问题
NURBS 不是单纯的 R 3 \mathbb{R}^3 R3 中曲面,而是由参数域映射得到的对象。也就是说,你不仅要拟合
S ( u , v ) ⊂ R 3 , (45) S(u,v)\subset \mathbb{R}^3, \tag{45} S(u,v)⊂R3,(45)
还必须决定每个观测点、高斯体元或 surface sample 对应哪个 ( u , v ) (u,v) (u,v)。
这一问题可抽象为寻找一个参数化映射
ϕ : X → Ω , X ⊂ R 3 , (46) \phi:\mathcal{X}\rightarrow \Omega,\qquad \mathcal{X}\subset \mathbb{R}^3, \tag{46} ϕ:X→Ω,X⊂R3,(46)
使得样本点 x n \mathbf{x}_n xn 能在某个参数点 ( u n , v n ) = ϕ ( x n ) (u_n,v_n)=\phi(\mathbf{x}_n) (un,vn)=ϕ(xn) 上被解释,并满足
x n ≈ S ( u n , v n ) . (47) \mathbf{x}_n \approx S(u_n,v_n). \tag{47} xn≈S(un,vn).(47)
难点在于, ϕ \phi ϕ 通常不是唯一的,而且其数值稳定性强烈依赖曲面 patch 选择、边界分割、局部曲率与采样分布。
没有稳定参数域,就没有稳定的 basis function support;没有稳定 support,控制点优化就会变得高度病态。因此:
参数化本身就是主问题,不是附属步骤。
更糟的是,参数化误差会直接传导到后续所有层:
- 基函数权重错;
- 控制点回归错;
- trim loop 映射错;
- 面拼接关系错。
也就是说,参数化不是一个"前处理可以忽略的小步骤",而是整个 NURBS 恢复问题的坐标基础设施。
5.4.2 patch segmentation 问题
真实工业零件通常不是单一 patch,而是多个自由曲面 patch 的组合。你必须决定:
- 哪些区域属于同一个曲面 patch;
- patch 边界应该在哪里切;
- patch 之间应满足何种连续性;
- 这些边界后续是否可被 trimming / stitching / topology assembly 正常消费。
也就是说,patch segmentation 不是简单的聚类,而是几何语义与拓扑后续处理的共同入口。
若将表面样本集记为 X \mathcal{X} X,则 patch segmentation 可视为一个划分问题:
X = ⨆ k = 1 K X k , (48) \mathcal{X} = \bigsqcup_{k=1}^{K}\mathcal{X}_k, \tag{48} X=k=1⨆KXk,(48)
并要求每个 X k \mathcal{X}_k Xk 都可由单一曲面模型 S k ( u , v ) S_k(u,v) Sk(u,v) 稳定解释。
然而,"可被单一 patch 解释"并不只是误差最小,还涉及:
- 是否适合后续参数化;
- 是否利于 trim boundary 定义;
- 是否与邻接 patch 的交线结构兼容;
- 是否有利于 continuity constraint 的施加。
因此,patch segmentation 本质上是一个 joint geometry-topology partitioning 问题。
5.4.3 control lattice estimation 与 knot placement 问题
即便参数域已知,NURBS 仍需要估计控制点网格与节点向量。控制格过稀,表达能力不足;控制格过密,条件数恶化、振荡增大、解释性下降。节点分布不合理,还会导致局部扭曲或数值不稳定。
若写成线性化形式,控制点估计常会落到类似
A p ≈ y (49) A\mathbf{p}\approx \mathbf{y} \tag{49} Ap≈y(49)
的问题,其中:
- p \mathbf{p} p 为所有控制点向量拼接后的未知量;
- A A A 的元素由基函数 N i , p ( u n ) N j , q ( v n ) N_{i,p}(u_n)N_{j,q}(v_n) Ni,p(un)Nj,q(vn) 决定;
- y \mathbf{y} y 为观测点坐标。
此时,节点向量和参数域一旦选择不合理,矩阵 A A A 就可能严重病态,导致最小二乘求解高度不稳定。
因此,control lattice estimation 与 knot placement 本质上是一个 representation complexity vs numerical conditioning 的平衡问题。不是"控制点越多越好",而是"在可解释性、逼近精度、稳定性、局部编辑性之间如何取得最优权衡"。
5.4.4 fairness / smoothness 问题
工业 CAD 不是"尽可能贴数据"就算成功。真实系统还要求:
- 曲面公平性(fairness);
- 曲率平滑;
- 局部振荡抑制;
- patch 接缝连续性;
- 适于制造与后处理。
因此,很多情况下最优曲面不是数据误差最小的那一个,而是:误差、光顺、复杂度与可制造性共同权衡后的那一个。
一个典型的公平性正则可抽象写成
L fair = ∫ Ω ( ∥ S u u ∥ 2 + 2 ∥ S u v ∥ 2 + ∥ S v v ∥ 2 ) d u d v , (50) \mathcal{L}{\text{fair}}=\int{\Omega}\left(\|S_{uu}\|^2 + 2\|S_{uv}\|^2 + \|S_{vv}\|^2\right)\,du\,dv, \tag{50} Lfair=∫Ω(∥Suu∥2+2∥Suv∥2+∥Svv∥2)dudv,(50)
它惩罚高频振荡与局部波纹。
若两个 patch S a , S b S_a,S_b Sa,Sb 需要满足 G 1 G^1 G1 或 C 1 C^1 C1 连续,则还需在公共边界上额外施加切向或法向兼容条件。
换句话说,工业曲面不是"把数据点连成一张皮"这么简单,而是要求这张皮:
- 在数学上平顺;
- 在制造上可控;
- 在视觉上合理;
- 在拼接上不出事故。
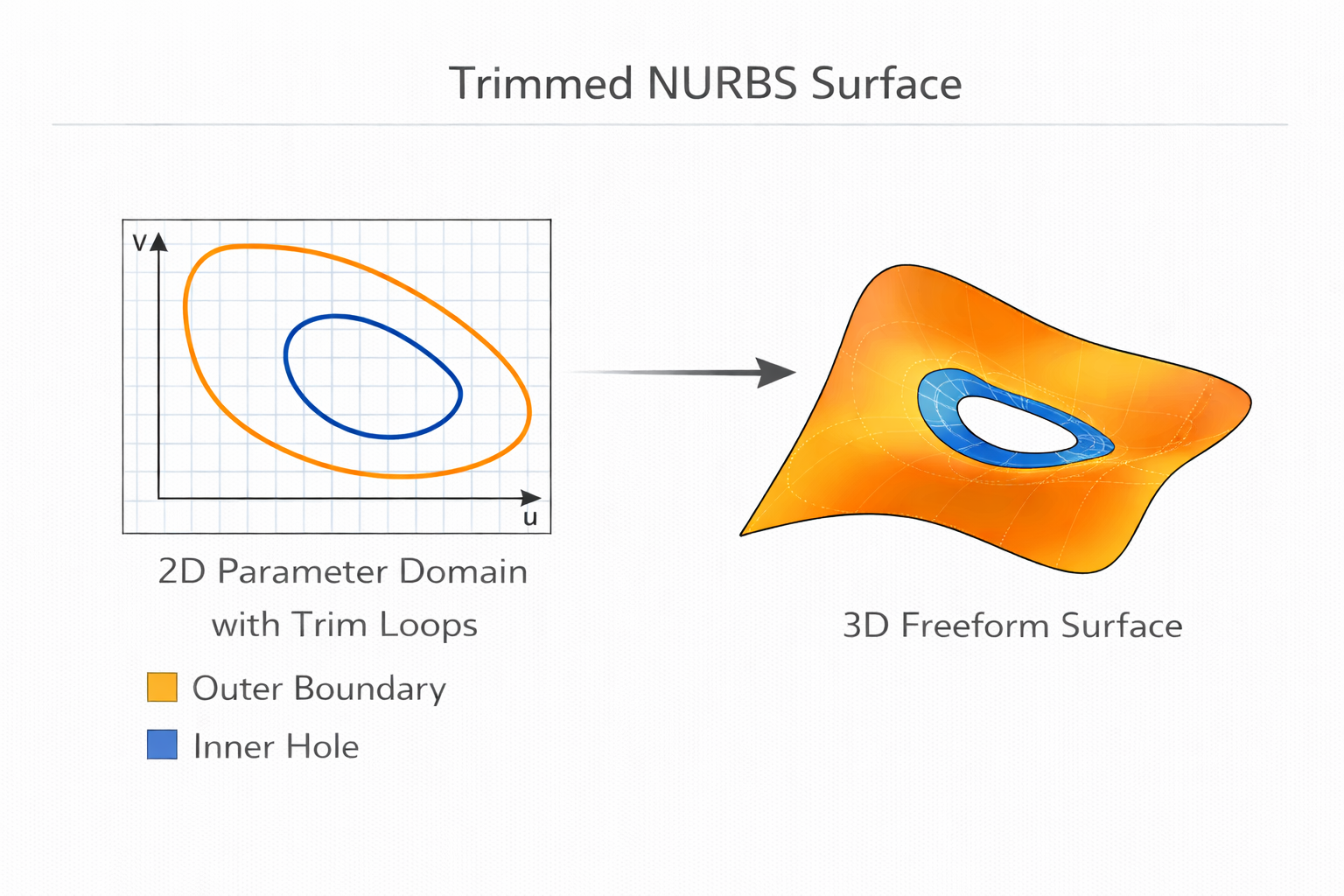
5.4.5 trimming boundary recovery 问题
大量工程面都不是完整的参数曲面,而是被 trim curves 裁切之后留下的有效子域。这里最关键的一点是:
trim curve 通常定义在参数域上,而不是在 3D 空间中随便画一条线。
这意味着,恢复 trimmed surface 不是"先有 3D 曲线,再贴到曲面上"那么简单,而是要保证:
- trim loop 在参数域中闭合;
- trim loop 与曲面边界关系合法;
- 多个 loop 的内外关系正确;
- 裁切后得到的面片可进入 B-rep 装配。
更形式化地说,设参数域为 Ω \Omega Ω,trim loop 为
γ l : 0 , 1 → Ω , l = 1 , ... , L , (51) \gamma_l:0,1\rightarrow \Omega,\qquad l=1,\dots,L, \tag{51} γl:0,1→Ω,l=1,...,L,(51)
则有效面域往往不是整个 Ω \Omega Ω,而是
Ω valid = Ω ∖ ⋃ l = 1 L Int ( γ l ) (52) \Omega_{\text{valid}} = \Omega \setminus \bigcup_{l=1}^{L}\text{Int}(\gamma_l) \tag{52} Ωvalid=Ω∖l=1⋃LInt(γl)(52)
或其某种带内外关系的变体。
真正进入三维的有效面片是
S ( Ω valid ) . (53) S(\Omega_{\text{valid}}). \tag{53} S(Ωvalid).(53)
问题的关键在于,哪怕三维中看到了一条看似合理的边界曲线,它也未必对应参数域中的合法闭环;而若参数域里 trim loop 的方向、嵌套关系、自交性处理不正确,最终得到的面片就可能在拓扑上非法。
这正是自由曲面 CAD 重建长期最难的区域之一。因为 trim 不只是"裁掉多余部分",而是在问:哪一部分曲面在几何上存在、在参数上合法、在拓扑上可装配、在交换标准中可表达。
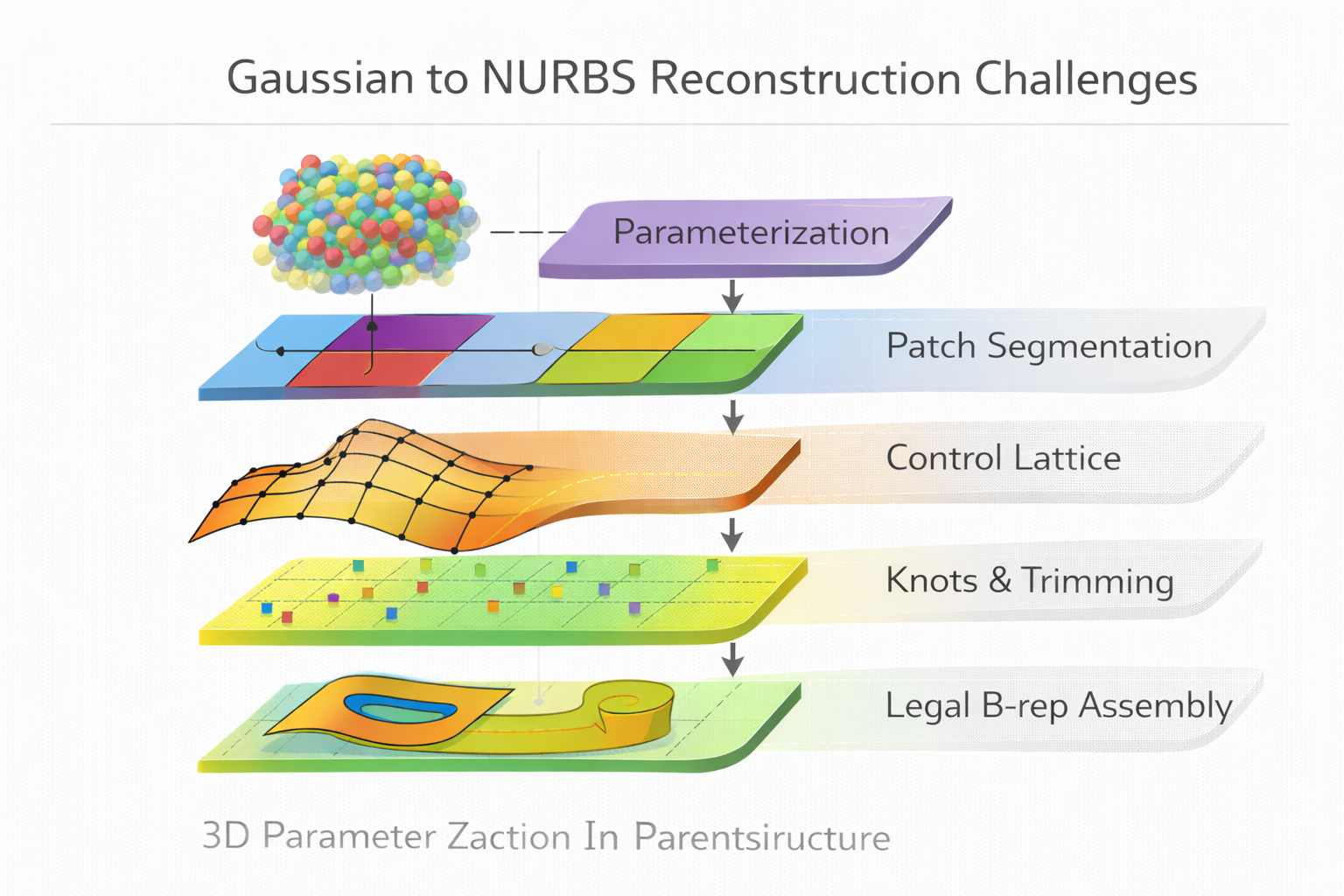
5.5 为什么自由曲面 / trimmed NURBS 仍是当前路线最难跨过去的一层
综合来看,当前很多方法之所以能在 primitive-based 或 limited freeform setting 下表现不错,是因为它们还没有完全进入 trimmed NURBS 的高复杂度区域。
对 Gaussian 路线而言,这个难点尤其尖锐。因为 Gaussian 天然工作在:
- 连续统计占据;
- 可微渲染;
- 局部密度/外观拟合;
而 NURBS/B-rep 需要工作在:
- 参数域;
- 解析基函数;
- patch 切分;
- trim legality;
- topology validity。
这两套语言之间,并不存在一个天然、低损耗、直接可逆的映射。
前者更像一种"可被优化的连续雾",后者更像一套"可被审计的几何法律体系"。雾可以看起来很像物体,但法律体系要求每一条边界、每一个归属、每一个邻接关系都说得清清楚楚。
更严格地说,Gaussian 到 NURBS 至少存在三层 representation gap:
-
局部自由度类型不同
Gaussian 的局部自由度是中心、协方差、透明度、颜色;
NURBS 的局部自由度是参数、基函数支撑、控制点、权重、节点向量。
-
全局耦合方式不同
Gaussian 之间多靠渲染叠加耦合;
NURBS patch 之间要靠边界一致性、连续性和 trim legality 耦合。
-
可交付语义不同
Gaussian 输出的是高质量中间几何近似;
NURBS/B-rep 输出的是下游 CAD 内核可消费对象。
因此:
谁先打通"图像 / Gaussian → parameter domain → trimmed NURBS → legal B-rep"这条链,谁才真正进入工业 CAD 核心腹地。
5.6 结论
因此,本节的结论保守而明确:自由曲面与 trimmed NURBS 仍然是工程语义上探过程中最难、最关键、也最具壁垒的技术高地之一。
当前公开 3DGS→CAD 主线,大多仍停留在:
- primitive-based 重建;
- 受限 freeform;
- 以 mesh / point cloud 为中介的结构层面;
- 或仅在受限工程草图域内验证。
这距离真正工业级 trimmed NURBS + legal B-rep,仍有明显距离。更进一步地说,这个距离并不是"再多训一版模型"就能补上的,而是需要同时突破:
- 参数化学习;
- 结构化 patch 切分;
- 解析曲面拟合;
- trim 曲线恢复;
- B-rep 装配合法性;
- 与几何内核的数据结构对接。
这不是单一网络结构问题,而是:几何、拓扑、优化、数值稳定性与工程内核标准共同作用的问题。
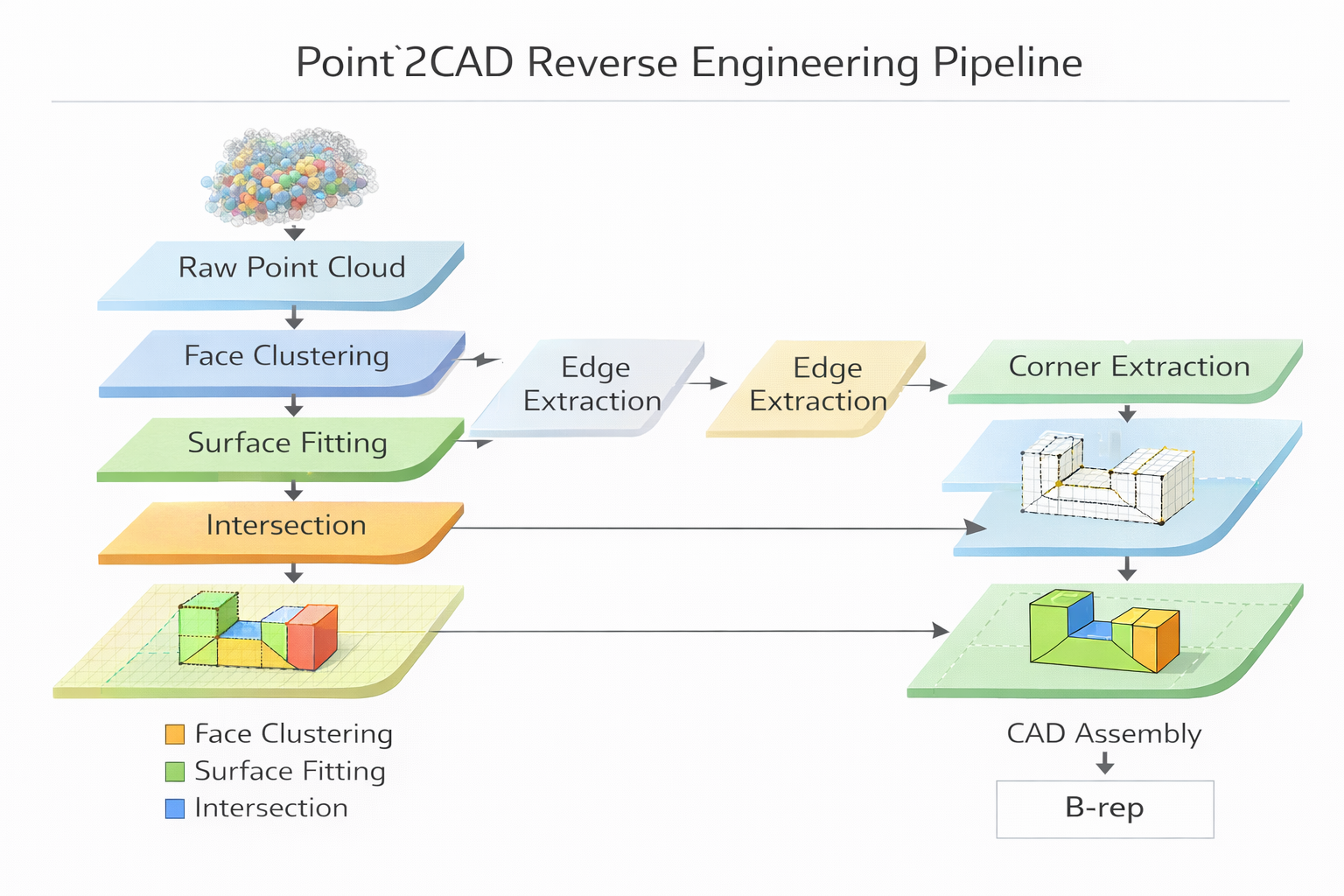
6. Point2CAD:作为必要对照组的经典几何逆向链路
6.1 为什么 Point2CAD 是理解 BrepGaussian 之前最重要的对照组
Point2CAD 的价值,不在于它一定代表最终方向,而在于它把"点云到 CAD/B-rep"这条经典逆向链路展现得极其完整。
论文给出的整体流程非常清楚:
- 将原始点云分割为与拓扑面对应的 cluster;
- 对每个 cluster 进行 primitive fitting 或 freeform surface fitting;
- 对得到的 analytic surfaces 做有限区域确定与必要延展;
- 对相邻 surfaces 做 pairwise intersections,恢复候选 edges;
- 对相邻 edges 求交,恢复 corners;
- 基于 surfaces、edges、corners 与支持点,执行 trimming;
- 输出包含解析曲面、兼容边/角点与 adjacency matrices 的 B-rep 结果。
这条链路的关键意义在于:
它不是把"拓扑"当作最后附加的一层标签,而是让 topology 从 analytic surfaces 的 extension 与 intersection 中长出来。
这与很多只做到几何拟合的路线,存在根本区别。从 OpenCascade 等工业几何内核的定义来看,B-rep 的本质正是 geometry within topology:几何提供曲线与曲面,拓扑提供 vertex、edge、wire、face、shell、solid 之间的绑定与连接关系。
因此,Point2CAD 的重要性不在于"它能拟合表面",而在于它的流程开始逼近工业几何内核真正关心的数据结构层。
6.2 Point2CAD 揭示了什么:CAD reconstruction 是约束链条,不是并列模块拼装
Point2CAD 最值得重视的地方,是它把 CAD reconstruction 的依赖关系揭示得非常清楚:
- 一个 edge,通常是两个 surfaces 的 intersection;
- 一个 corner,通常是两个 edges 的 intersection;
- 最终 trimming 与 topology assembly,又依赖于前面 surfaces / edges / corners 的一致性。
可写成
E ^ = I ( F ^ i , F ^ j ) , (54) \hat{E}=\mathcal{I}(\hat{F}_i,\hat{F}_j), \tag{54} E^=I(F^i,F^j),(54)
以及
V ^ = I ( E ^ m , E ^ n ) , (55) \hat{V}=\mathcal{I}(\hat{E}_m,\hat{E}_n), \tag{55} V^=I(E^m,E^n),(55)
其中 I \mathcal{I} I 表示 intersection operator, F ^ i , F ^ j \hat{F}_i,\hat{F}_j F^i,F^j 是拟合出的候选 surfaces, E ^ m , E ^ n \hat{E}_m,\hat{E}_n E^m,E^n 是候选 edges。
这说明 CAD reconstruction 并不是一组相互独立的并列任务,而是一个强耦合的级联链条。若 surface fitting 出错,则 edge intersection 会错;edge 出错,corner 就会错;corner 出错,后续 trimming 与 topology assembly 就会继续失真。
为了更准确地理解这种级联,可以把整个流程写成复合映射:
B ^ = T ∘ C ∘ I e ∘ I f ∘ S ( P ) , (56) \hat{\mathcal{B}} = \mathcal{T}\circ \mathcal{C}\circ \mathcal{I}_e\circ \mathcal{I}_f\circ \mathcal{S}(\mathcal{P}), \tag{56} B^=T∘C∘Ie∘If∘S(P),(56)
其中:
- P \mathcal{P} P:输入点云;
- S \mathcal{S} S:surface segmentation 与 fitting;
- I f \mathcal{I}_f If:surface-to-edge intersection;
- I e \mathcal{I}_e Ie:edge-to-corner intersection;
- C \mathcal{C} C:clipping / trimming;
- T \mathcal{T} T:topology assembly。
一旦最前端 S \mathcal{S} S 出现偏差,误差就不只是"局部表面差一点",而会经过多个非线性算子逐层放大。特别是 intersection operator 对表面法向、局部曲率、边界外推都极为敏感,因此 tiny fitting error 往往会变成 large topological error。
因此:
"几何拟合做得不错"并不自动推出"B-rep 合法"。
6.3 Point2CAD 的判断:解析面正确,并不等于后续装配简单
Point2CAD 的工程启示之一在于:即便你已经拿到了 analytic surfaces,后续的 intersection、clipping、corner extraction 与 topology assembly 依然高度非平凡。
论文明确说明,对于复杂 freeform surfaces,解析求交会非常复杂且可能不稳定,因此它在关键 intersection 阶段,选择把 surfaces 转换为 triangle meshes,再调用成熟数值工具做更稳定的相交计算。
也就是说,它并没有执着于"全解析闭式求交",而是采取了一个工程上更稳健的折中路径。
这个决策非常值得深挖。许多人会误以为"既然已经有了解析曲面,为何不坚持解析到底?"但真正的工业几何系统几乎都知道:解析对象存在 与 解析算法稳定 是两回事。
自由曲面之间的求交,常常涉及:
- 多解分支;
- 局部切触;
- 高曲率区域的不稳定根;
- 参数域映射下的自交与伪交;
- 数值容差下的拓扑不一致。
因此,把曲面局部三角化后调用成熟 mesh boolean / intersection 工具,虽然在"纯解析美感"上退了一步,却在工程鲁棒性上前进了一大步。
Point2CAD 的这一步,其实非常工业:它没有迷信表示形式的"高贵",而是优先保证后续 topology reasoning 的稳定输入。解析曲面只是开始,不是终点;几何正确只是必要条件,不是交付条件。
很多图像到 CAD 的路线,如果只展示"我拟合了曲面",却没有解释后续 edges、corners、trim loops 与 topology validity 如何落地,本质上只是把最难的问题推迟了。
6.4 Point2CAD 与 Gaussian 路线的本质关系:不是替代,而是参照
Point2CAD 之所以是理解 BrepGaussian 的最佳对照组,不是因为它要压倒图像路线,而是因为它把 CAD/B-rep 的硬约束链条暴露得非常清楚。
它告诉我们,要得到真正的 B-rep,至少绕不开:
- face-level segmentation;
- surface instantiation;
- surface extension;
- edge intersection recovery;
- corner identification;
- trimming reasoning;
- topology assembly。
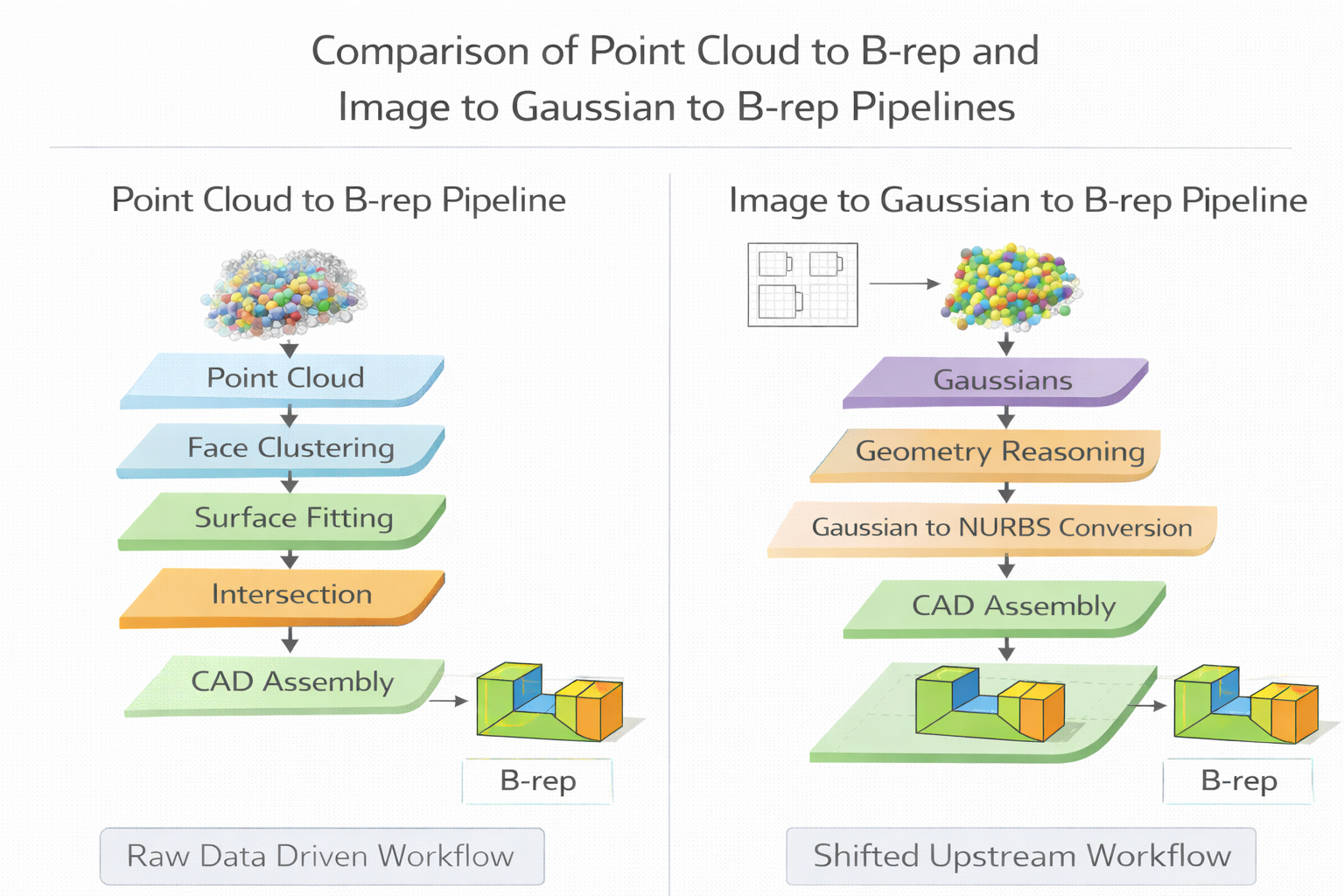
而 BrepGaussian 这类图像到 CAD 的路线,本质野心就在于:
把这条通常发生在点云之后的重型几何链路,前移到图像域与 Gaussian 域中。
所以,图像 → \to → Gaussian → \to → B-rep,并不是取消了 Point2CAD 的那条链路,而是把它前移并重写了:
- 原本由显式点云提供的局部几何证据;
- 现在尝试由 Gaussian、feature field 或 differentiable rendering supervision 提供。
这个理解非常关键。否则就会误以为"图像到 CAD 只是多加几个特征头"。其实不是,它是在把传统 reverse engineering pipeline 上游化、可微化,并尽量内嵌到统一优化框架中。
更抽象地说,Point2CAD 与 BrepGaussian 的差异,不在于是否需要这些几何步骤,而在于:
- 这些步骤由谁来提供证据;
- 在什么表示层上执行;
- 哪些部分被纳入端到端优化闭环。
Point2CAD 更像后端解析几何流水线;BrepGaussian 试图把这条流水线的一部分往前拉到图像与可微中间表示层。
6.5 为什么 Point2CAD 会成为 BrepGaussian 的必要背景板
若没有 Point2CAD 这类工作作为参照,很容易低估 BrepGaussian 想解决的问题难度。
因为从表面上看,BrepGaussian 好像只是:
- 从多视图图像输入;
- 先得到某种中间表示;
- 再输出 patch / edge / B-rep 结果。
但 Point2CAD 告诉我们,真正难的不是"有没有一个中间表示",而是:
- 这些中间结构是否足以支撑稳定 surface instantiation;
- 是否能支持 robust intersections;
- 是否能导出正确 trimming;
- 是否能形成合法 incidence / adjacency;
- 是否能最终变成可编辑、可交换、可制造的工程资产。
也就是说,Point2CAD 等于给出了一个"最低限度完整"的几何逆向模板。任何图像到 B-rep 的新路线,只要没有显式回答这些约束最终如何落实,就还不能说自己真正穿透了工程几何链路。
换一种说法:Point2CAD 像一张"工业几何体检表"。你可以不用它的具体实现,但你绕不开它暴露出来的那些器官:
- surface
- edge
- corner
- trim
- topology
少了哪个,系统都不算真正健康。
6.6 这对图像到 CAD 路线意味着什么
从 Point2CAD 回看图像路线,可以得出一个共识:图像到 Gaussian 再到 B-rep,不是绕过传统 CAD 逆向,而是在尝试把传统 CAD 逆向上游化。
这意味着,未来真正有竞争力的路线,往往不是纯视觉、纯几何、或纯规则之一,而更可能是三者混合:
- 用视觉优化吃掉图像证据;
- 用 Gaussian / field representation 承接连续中间几何;
- 用 analytic fitting + topology reasoning 完成最终工程语义装配。
从这个角度看,Point2CAD 与 BrepGaussian 不是相互否定,而是处于同一技术版图的不同层级:
- 一个代表点云后端的完整约束链条;
- 另一个代表这条链条向图像域前移的野心。
真正困难的并不是"能不能把图像变成曲面",而是:能不能让图像证据在上游就足够结构化,以至于后续 analytic fitting 与 topology reasoning 不再是脆弱的补救,而成为稳定的闭环组成部分。 这是图像到 CAD 路线最深的难点。
6.7 阶段性结论
Point2CAD 的价值,不在于它证明点云路线"更先进",而在于它揭示了:
合法 CAD/B-rep 不是由"拟合几何"自动涌现的,而是由一整套 surface--edge--corner--trim--topology 约束链条共同生成的。
因此,任何声称从图像或 Gaussian 直接走到工程资产的路线,都必须回答:这些约束链条最终是如何落地的。若不能回答,就只是把最难的问题延后,而不是解决。也正是在这一点上,我这Part II 的逻辑收束为:
- GaussianCAD 证明 3DGS 已经开始触碰设计表达;
- NURBS/trimmed surfaces 暴露了真正工业语义的技术高地;
- Point2CAD 则给出了一个可用于衡量任何"图像到 B-rep"路线是否真正落地的参照系。