基于分层学习的射频无人机检测与识别技术,准确率达99%!
摘要
无人机在民用与工业领域应用愈发广泛,但非法使用行为也随之激增,对无人机的高效检测与识别成为亟待解决的研究难题。本文提出一种基于机器学习的新型无人机检测识别方法,依托分层思想构建集成学习模型,对射频(RF)数据进行预处理与特征提取,并通过滤波优化射频信号输出效果。该模型包含四个分层工作的分类器,依次完成无人机存在性检测、机型识别,以及Bebop和AR两款无人机的飞行模式判定。基于公开数据集的验证结果表明,该方法相较现有系统性能更优,无人机存在性、机型及飞行模式的综合识别准确率可达99%左右。
引言
本世纪以来,无人机凭借精准传感器技术的发展实现全球普及,其低成本、高空间分辨率的优势,使其在军事测绘、农业植保、物流配送、应急搜救等多领域替代或补充传统卫星与通信系统,成为现代技术体系的重要组成部分。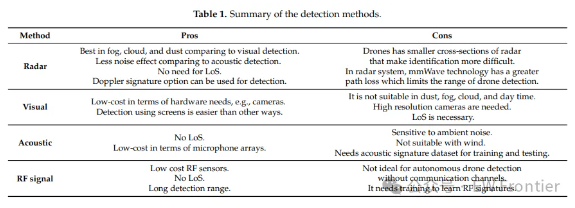
但无人机的广泛应用也引发了严重的安全与隐私问题:未经授权的无人机不仅曾撞击军用直升机、闯入白宫禁飞区,还被用于走私、监狱违禁品运输,甚至可搭载爆炸物造成重大安全威胁。加之多数无人机未完成注册、地理围栏功能易被关闭,对禁飞区入侵无人机的快速检测、机型及飞行模式识别,成为保障公共安全的核心需求。
当前无人机检测技术主要包括射频、雷达、声学、视觉、激光雷达等,但单一技术均存在明显短板:雷达受无人机小截面特性限制,视觉技术依赖视距且无法在夜间工作,声学技术易受环境噪声干扰。而射频信号检测具有低成本、无对视距要求、检测距离远的优势,通过提取无人机控制器的射频指纹,结合机器学习技术实现无人机特征识别,成为该领域的研究热点。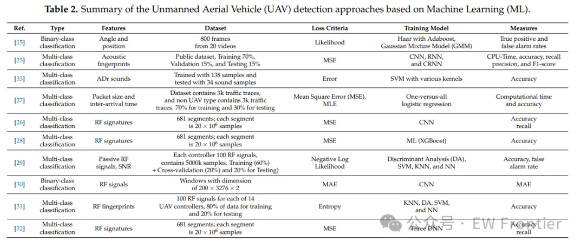
为此,本文设计了一种基于机器学习的智能分层检测方法,依托射频信号完成无人机存在性、机型及飞行模式的逐级识别,旨在实现轻量、高效、高准确率的无人机检测识别效果。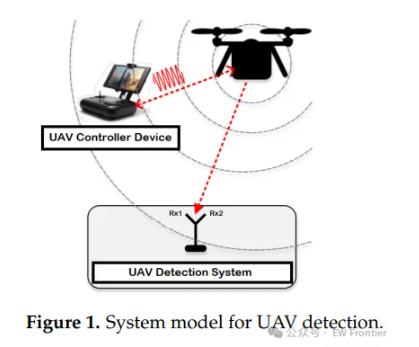
方法简介
本文提出的射频无人机检测识别方法,核心为分层集成学习模型 ,整体流程包含数据预处理、特征提取、分层分类识别三个关键环节,基于公开的无人机射频数据集完成模型训练与验证,具体设计如下:
1. 实验基础与数据集
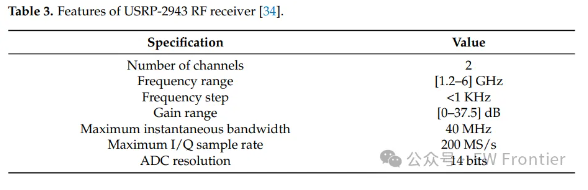
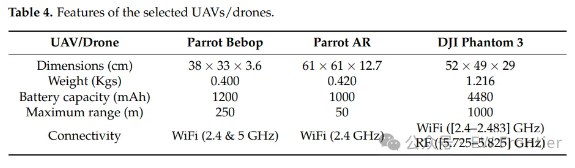
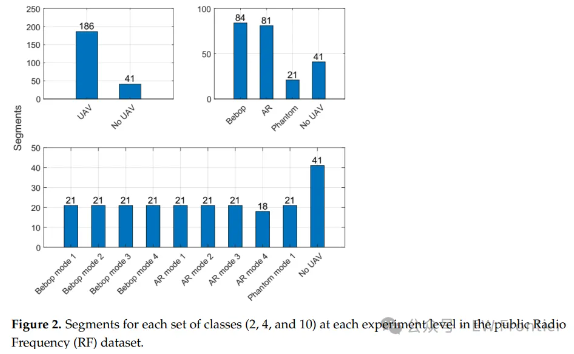
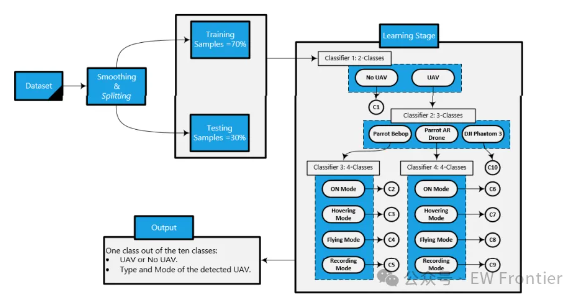
实验选取Parrot Bebop、Parrot AR、DJI Phantom 3三款主流小型无人机为研究对象,采用USRP-2943射频接收器采集2.4GHz ISM频段的射频信号(含上下双频段),所使用的公开数据集包含227个信号段(每段2000万个样本),分为无无人机、三款无人机及Bebop/AR各四种飞行模式(开机、悬停、飞行、录像),构建2类、4类、10类三个检测层级。
2. 数据预处理
对原始射频信号进行滤波平滑 与特征工程:采用基于平均法的FIR滤波器消除噪声与干扰,通过快速傅里叶变换(FFT)将时域信号转换为频域信号并去除零频分量,降低计算复杂度,同时将信号归一化处理,提升模型识别稳定性。
3. 分层集成分类器设计
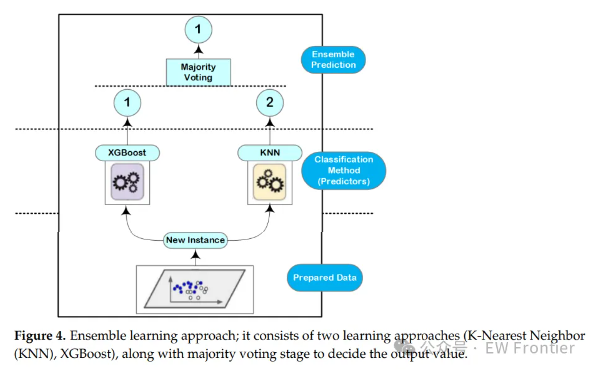
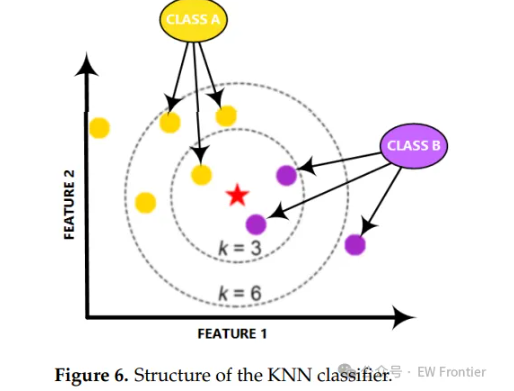
模型包含四个逐级工作的集成分类器,均基于XGBoost与K近邻(KNN)算法构建集成学习模块,通过多数投票法输出分类结果,各分类器功能逐级递进:
-
分类器1(二分类):完成无人机存在性检测,判定"有无人机/无无人机";
-
分类器2(三分类):对检测到的无人机进行机型识别,区分Bebop、AR、Phantom 3;
-
分类器3(四分类):针对Bebop无人机,进一步识别其四种飞行模式;
-
分类器4(四分类):针对AR无人机,进一步识别其四种飞行模式。
分层设计的核心优势在于逐级剔除无关类别,降低同类射频信号的识别干扰,同时通过网格搜索完成XGBoost(学习率0.1、估计器数100)与KNN(K=1)的超参数优化,避免过拟合与欠拟合。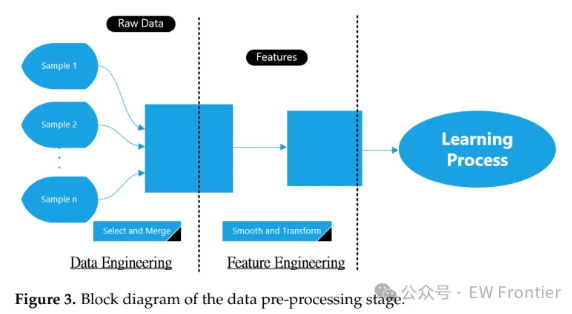
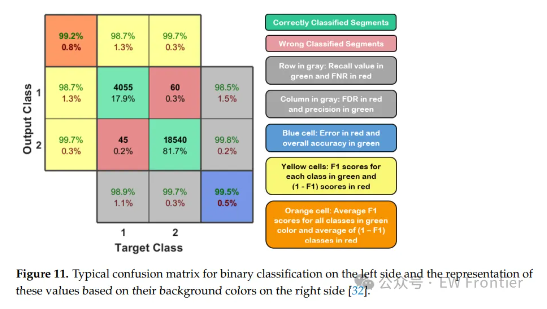
4. 模型验证指标
采用准确率、精确率、召回率、F1分数、ROC曲线(AUC值)作为模型性能评价指标,同时统计检测处理时间,全面验证模型的识别效果与实时性。
结论
本文针对射频信号的无人机检测识别问题,设计了基于分层集成学习的检测模型,通过四级分类器实现了无人机存在性、机型、飞行模式的逐级精准识别,核心结论如下:
-
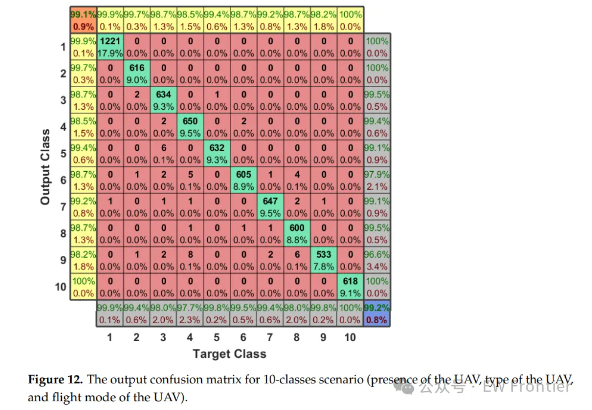
模型通过射频信号预处理与分层分类设计,有效降低了环境噪声与同类无人机射频信号的干扰,在10类检测场景下(含无无人机、三款机型及Bebop/AR飞行模式),综合识别准确率达99.2%,平均F1分数99.1%,召回率99.11%,检测单样本的处理时间仅6.54-7.41毫秒,兼具高准确率与实时性;
-
相较同数据集下的CNN(59.2%)、XGBoost(70.1%)、DNN(46.8%)等方法,分层集成学习模型的识别性能实现大幅超越,验证了分层设计在射频无人机识别中的有效性;
-
该方法基于低成本射频传感器实现,无需视距要求,可在复杂城市环境中工作,为无人机安全检测提供了轻量、高效的技术方案。
未来研究将进一步拓展数据集,纳入更多类型的无人机样本,提升模型的泛化能力,使其适用于更复杂的实际应用场景。