Pytorch 快速入门保姆级教程(七)
2026.03 | ming

十四. 经典卷积网络解析
这一章主要带大家练习如何使用PyTorch构建一个完整网络模型。
在深度学习领域,有一条不成文的学习捷径:"读经典论文,复现经典代码"。LeNet、AlexNet、VGG、ResNet等模型,不仅仅是教科书上的历史里程碑,更是现代复杂神经网络的基石。事实上,当前最前沿的大模型的模块设计思想,很多都能在这些经典网络中找到影子。
我们将通过PyTorch亲手复现这些改变了AI历史进程的经典架构。这不仅是熟练PyTorch API(如
nn.Conv2d、nn.Linear、nn.Sequential等)的最佳实战机会,更是一次梳理深度学习发展脉络的过程。
14.1 LeNet-5
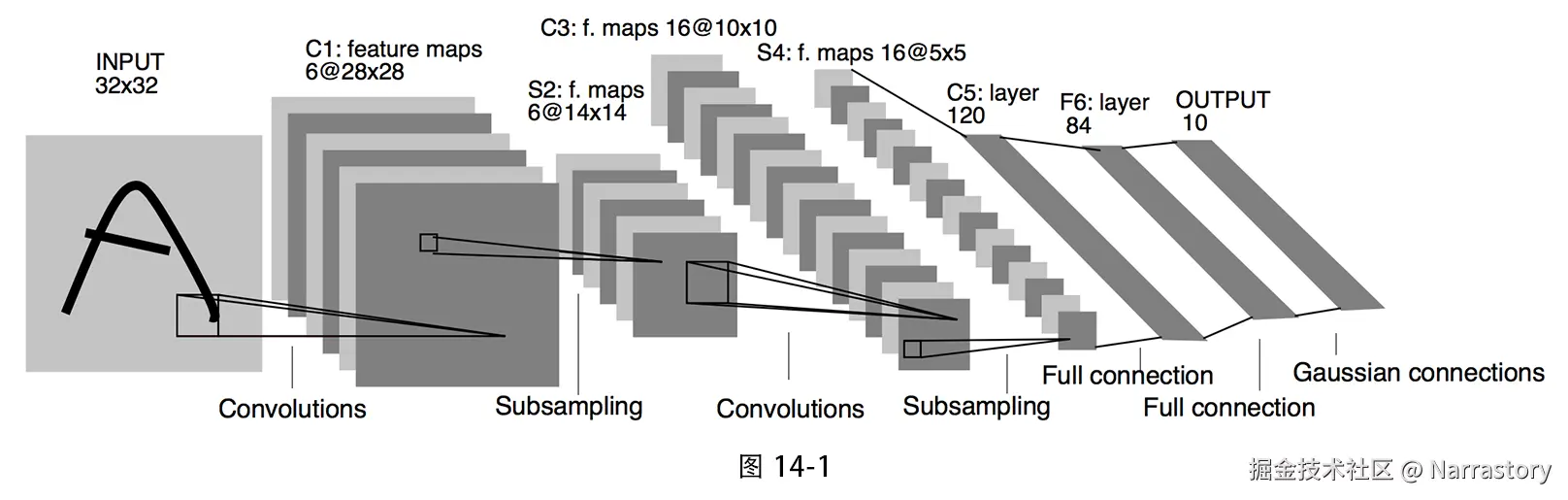
LeNet-5这个网络可以说是卷积神经网络的"Hello World",这个卷积网络由Yann LeCun于1998年发布,专门设计用来识别手写支票上的数字,它奠定了现代 CNN 的基本结构:卷积层提取特征、池化层降维、全连接层分类
虽然以今天的标准看它很浅(只有7层),参数也只有6万左右,但它五脏俱全,对我们理解卷积的工作原理有着不可替代的意义。
LeNet-5 的输入是 32×32 的灰度图像 (MNIST 手写数字原始是28×28,论文中将其放大到32×32以便边缘信息被更好提取)。整个网络包含 7 层(不含输入层),每层都有可训练参数。其结构如图 14‑1 所示。
下面用 PyTorch 搭建一个 LeNet-5。为了与现代实践接轨,我们做两点简化调整:
- 使用 ReLU 代替原始的 tanh
- 使用 最大池化 代替带可学习系数的平均池化
- 要求输入尺寸为 32×32,若使用 28×28 的 MNIST 图像,需先进行填充
python
import torch
import torch.nn as nn
class LeNet5(nn.Module):
"""
LeNet-5 的 PyTorch 实现
输入: (batch_size, 1, 32, 32) # 灰度图,大小32x32
输出: (batch_size, 10) # 10个类别
"""
def __init__(self, num_classes=10):
super(LeNet5, self).__init__()
# 特征提取部分:卷积 + 池化
self.features = nn.Sequential(
# C1: 卷积层
# 输入1通道,输出6通道,卷积核5x5,步长1,无填充 → 输出28x28
nn.Conv2d(in_channels=1, out_channels=6, kernel_size=5, stride=1, padding=0),
nn.ReLU(),
# S2: 池化层 (下采样)
# 2x2 窗口,步长2 → 输出14x14
nn.MaxPool2d(kernel_size=2, stride=2),
# C3: 第二个卷积层
# 输入6通道,输出16通道,卷积核5x5 → 输出10x10
nn.Conv2d(in_channels=6, out_channels=16, kernel_size=5, stride=1, padding=0),
nn.ReLU(),
# S4: 第二个池化层
# 2x2 窗口,步长2 → 输出5x5
nn.MaxPool2d(kernel_size=2, stride=2),
)
# 分类部分:全连接层
self.classifier = nn.Sequential(
nn.Flatten()
nn.Linear(16 * 5 * 5, 120),
nn.ReLU(),
nn.Linear(120, 84),
nn.ReLU(),
nn.Linear(84, num_classes),
# 注意:这里不加Softmax,因为CrossEntropyLoss自带Softmax
)
def forward(self, x):
x = self.features(x) # 特征提取
x = self.classifier(x) # 分类
return xLeNet‑5 虽然规模小巧,却第一次向世界证明了端到端的卷积神经网络能够解决实际问题。从它开始,CNN 走出了实验室,进入了银行支票识别、邮局邮编识别等工业场景,并最终启发了后来一系列深度网络的诞生。
14.2 AlexNet
如果说 LeNet-5 是卷积神经网络的"Hello World",那么 AlexNet 就是那个让全世界注意到深度学习的"重磅炸弹"。2012 年,ImageNet 大规模视觉识别挑战赛(ILSVRC)上,一个来自多伦多大学的团队------Alex Krizhevsky、Ilya Sutskever 和 Geoffrey Hinton ------带着他们的 AlexNet 以 15.3% 的 Top-5 错误率 横扫对手,比第二名(26.2%)低了十几个百分点。这一成绩震惊了整个计算机视觉界,从此深度学习正式进入爆发期。AlexNet 证明了一个事实:只要网络足够深、数据足够多、计算足够强,深度学习可以碾压所有手工设计的特征。
在 AlexNet 之前,人们普遍认为神经网络层数太多会难以训练,容易过拟合,计算量也无法承受。AlexNet 之所以能成功,得益于几个关键创新:
- 更深的网络:AlexNet 有 8 层(5 个卷积层 + 3 个全连接层),参数量约 6000 万,远大于 LeNet-5 的 6 万。
- ReLU 激活函数:用线性整流单元代替饱和的非线性函数(如 tanh),极大缓解了梯度消失问题,训练速度提升数倍。
- Dropout 正则化:在全连接层随机丢弃部分神经元,有效防止过拟合。
- 数据增强:对训练图像进行随机裁剪、水平翻转、改变 RGB 通道强度等,让有限的数据产生更多变化。
- GPU 并行训练:使用两块 GTX 580 GPU(3GB 显存)并行训练,将网络分布在两块显卡上,这是当时解决显存瓶颈的巧妙设计。
- 局部响应归一化(LRN):对局部神经元的输出进行归一化,模拟生物神经元的侧抑制机制(不过后来的研究表明 LRN 效果有限,逐渐被 BatchNorm 取代)。
这些创新共同构成了现代深度卷积网络的基石。AlexNet具体结构如图14-2所示:
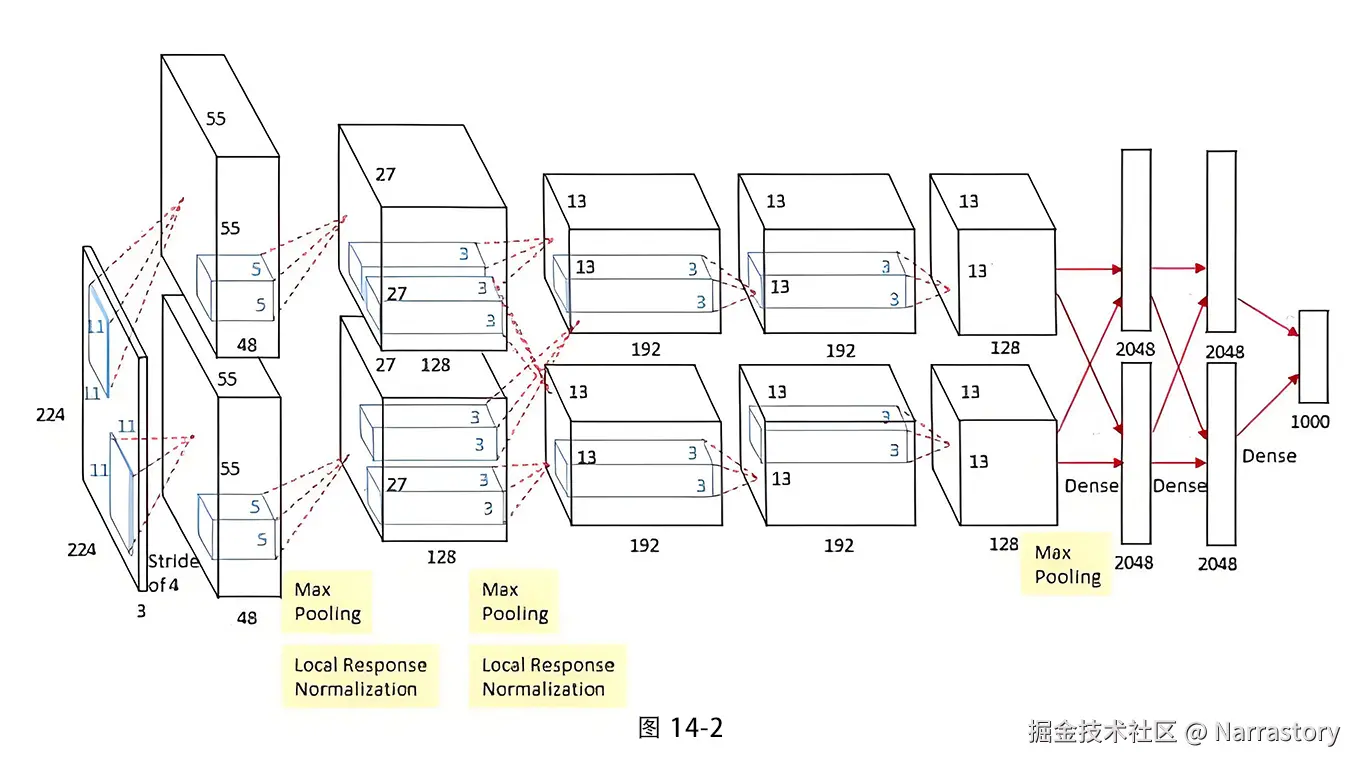
AlexNet 的输入是 227×227×3 的彩色图像。整个网络包含 8 个学习层:5 个卷积层和 3 个全连接层。下面给出 PyTorch 实现。
python
import torch
import torch.nn as nn
class AlexNet(nn.Module):
"""
输入: (batch_size, 3, 227, 227)
输出: (batch_size, 1000) # ImageNet 1000类
"""
def __init__(self, num_classes=1000):
super(AlexNet, self).__init__()
# 特征提取部分:5个卷积层 + 池化
self.features = nn.Sequential(
# Conv1
nn.Conv2d(3, 96, kernel_size=11, stride=4, padding=0), # 输出: 55x55
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2), # 输出: 27x27
# Conv2
nn.Conv2d(96, 256, kernel_size=5, stride=1, padding=2), # 输出: 27x27
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2), # 输出: 13x13
# Conv3
nn.Conv2d(256, 384, kernel_size=3, stride=1, padding=1), # 输出: 13x13
nn.ReLU(),
# Conv4
nn.Conv2d(384, 384, kernel_size=3, stride=1, padding=1), # 输出: 13x13
nn.ReLU(),
# Conv5
nn.Conv2d(384, 256, kernel_size=3, stride=1, padding=1), # 输出: 13x13
nn.ReLU(),
nn.MaxPool2d(kernel_size=3, stride=2), # 输出: 6x6
)
# 分类部分:3个全连接层
self.classifier = nn.Sequential(
nn.Flatten()
nn.Dropout(p=0.5), # Dropout 防止过拟合
nn.Linear(256 * 6 * 6, 4096), # 展平后输入 9216 -> 4096
nn.ReLU(),
nn.Dropout(p=0.5),
nn.Linear(4096, 4096),
nn.ReLU(),
nn.Linear(4096, num_classes), # 输出类别数
# 注意:通常不加 Softmax,因为 CrossEntropyLoss 自带
)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x尽管 AlexNet 在当时取得了突破性成就,但从今天的视角看,它也存在一些明显的局限性:第一层卷积使用的 11×11 核参数量大,现代用堆叠 3×3 核替代。而且整个模型参数量过大,容易过拟合,6000 万参数主要集中在三个全连接层,导致模型容量过大,必须依赖 Dropout 和数据增强来抑制过拟合。后来的 VGGNet 虽然参数量更大,但通过堆叠小卷积核提高了参数效率。其次是网络深度有限,8 层结构在当时已算"深",但以今天标准看很浅。梯度消失问题限制了进一步加深的可能,直到 ResNet 引入残差连接才彻底打破这一瓶颈。
14.3 VGGNet
还是那个视觉比赛,只不过这次是2014年,来自牛津大学 Visual Geometry Group(VGG)提出的 VGGNet 脱颖而出,在分类任务中取得亚军,定位任务中取得冠军。VGGNet 没有使用更大的卷积核,反而全部采用 3×3 的小卷积核,通过大幅增加网络深度来提升性能。它的出现证明了一个重要结论:网络的深度对模型性能至关重要,而通过堆叠小卷积核,可以在增加深度的同时控制参数量,并增强模型的非线性表达能力。
VGGNet 的核心贡献可以概括为以下几点:
- 全部使用 3×3 小卷积核 :在此之前,AlexNet 等网络往往使用较大的卷积核(如 11×11、5×5)来捕获大范围的空间特征。VGGNet 提出用多个连续的 3×3 卷积核堆叠来替代单个大卷积核。例如,两个 3×3 卷积核堆叠的感受野等同于一个 5×5 卷积核,三个 3×3 卷积核堆叠则等同于一个 7×7 卷积核。这样做有两个好处:
- 假设输入和输出的通道数均为 C,一个 7×7 卷积核的参数为 7×7×C×C=49C2;而三个 3×3 卷积核的参数为 3×(3×3×C×C)=27C2,参数量减少了约 45%。
- 每个卷积层后都跟随一个 ReLU 激活函数,三个 3×3 层就有三个非线性变换,而一个 7×7 层只有一个,这使得模型的决策函数更具判别力。
- 结构极其规整:VGGNet 的设计非常简单一致------全部使用相同的 3×3 卷积(步长 1,填充 1)和 2×2 最大池化(步长 2)。这种规整的设计使得网络易于理解和实现,也方便后续的修改和扩展。
- 深度优势:VGGNet 探索了网络深度对性能的影响,从 11 层到 19 层,实验表明越深的网络效果越好(直到过拟合极限)。
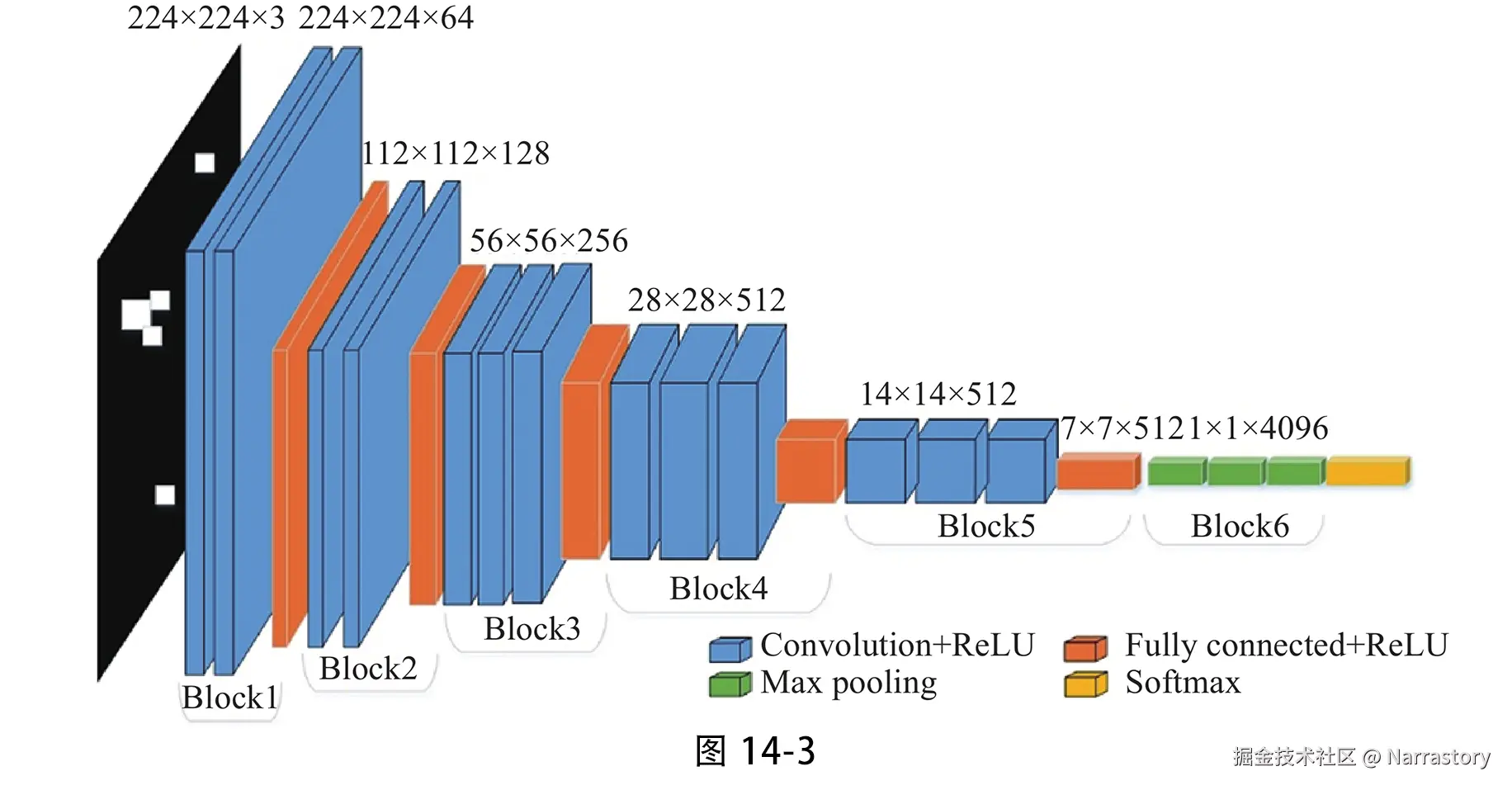
VGGNet 有多个变体,常用的是 VGG16 和 VGG19,数字代表网络中的权重层数(卷积层 + 全连接层)。以 VGG16 为例,它包含 13 个卷积层和 3 个全连接层,总共 16 个权重层。其结构如图14-3所示:
下面用PyTorch实现VGGNet16:
python
import torch
import torch.nn as nn
class VGG16(nn.Module):
def __init__(self, num_classes=1000):
super(VGG16, self).__init__()
# 1. 特征提取部分
self.features = nn.Sequential(
# Block 1: 3 -> 64
nn.Conv2d(3, 64, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(64, 64, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
# Block 2: 64 -> 128
nn.Conv2d(64, 128, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(128, 128, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
# Block 3: 128 -> 256
nn.Conv2d(128, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(256, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(256, 256, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
# Block 4: 256 -> 512
nn.Conv2d(256, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(512, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(512, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
# Block 5: 512 -> 512
nn.Conv2d(512, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(512, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.Conv2d(512, 512, kernel_size=3, padding=1), nn.ReLU(),
nn.MaxPool2d(kernel_size=2, stride=2),
)
# 2. 分类器部分 (包含展平、全连接、Dropout)
self.classifier = nn.Sequential(
nn.Flatten(), # 自动展平
nn.Linear(512 * 7 * 7, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, 4096), nn.ReLU(), nn.Dropout(0.5),
nn.Linear(4096, num_classes),
)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x14.4 ResNet
依然是那个ImageNet视觉竞赛,这次是在2015年,来自微软亚洲研究院的何恺明等人发明的ResNet(残差网络),以惊人的152层深度,将图像分类的错误率降低到了3.57%,超越了人类水平(约5%),一举夺得ILSVRC 2015冠军。
其实不难发现,很多对深度学习做出巨大贡献的模型架构思想都是在ImageNet竞赛赛场上出现的,这个竞赛究竟是何方神圣?简单来说,ImageNet是一个拥有超过1400万张标注图像的大规模数据集,而ILSVRC(ImageNet Large Scale Visual Recognition Challenge)则是基于它的年度比赛,被誉为计算机视觉领域的"奥运会"。每年,来自全球的顶尖团队都会在这里比拼算法的识别能力,也因此催生了AlexNet、VGG、GoogLeNet等一系列里程碑式的模型。
你可能想问:为什么之前的网络不敢堆到152层?按照常理,网络越深,表达能力应该越强,性能应该越好。但研究人员发现,当层数增加到一定程度时,训练效果反而变差------这不是过拟合,而是一个退化问题:深层网络的训练误差比浅层网络还要高。
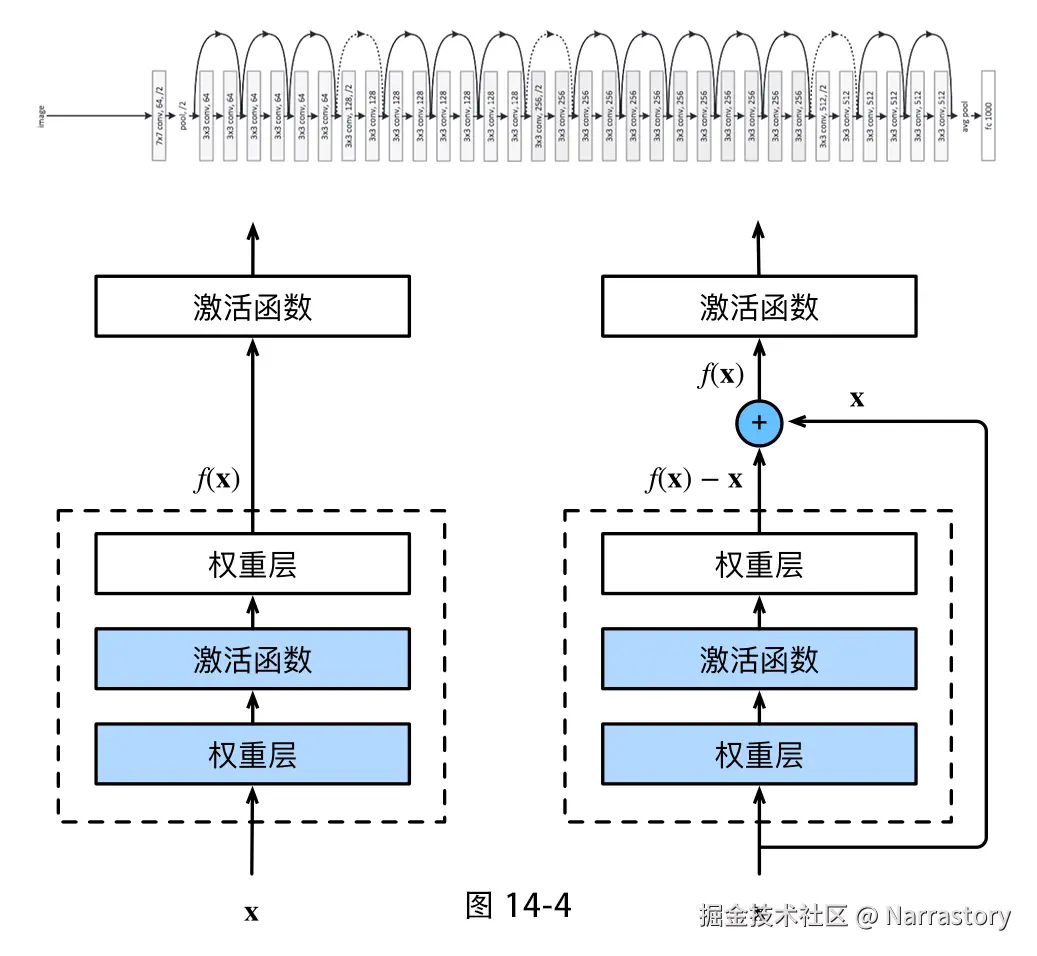
退化问题的根源在于梯度消失/爆炸 以及优化困难。随着网络加深,反向传播时梯度需要经过多个层连续相乘。如果权重初始化不当,梯度会指数级衰减(梯度消失)或增长(梯度爆炸),导致前面层的参数几乎无法更新,网络难以有效训练。而残差网络在反向传播时,由于跳跃连接的存在,梯度可以直接从后面的层流向前面的层,避免了连续相乘导致的梯度消失。
残差连接的结构如图14-4所示:
ResNet有很多版本,比如ResNet18、ResNet34、ResNet50、ResNet101、ResNet152等,它们只是每个阶段残差块的数量不同,结构完全一致。下面我们用PyTorch实现一个经典的ResNet18。ResNet18由1个初始卷积层和4个残差层(每个层包含若干个残差块)组成,最后通过全局平均池化和全连接层输出分类结果。
python
import torch
import torch.nn as nn
# 基础残差块(BasicBlock)
class BasicBlock(nn.Module):
def __init__(self, in_ch, out_ch, stride=1):
super().__init__()
# 主路径:两个3x3卷积,中间有BN和ReLU
self.conv = nn.Sequential(
nn.Conv2d(in_ch, out_ch, 3, stride=stride, padding=1, bias=False),
nn.BatchNorm2d(out_ch),
nn.ReLU(),
nn.Conv2d(out_ch, out_ch, 3, stride=1, padding=1, bias=False),
nn.BatchNorm2d(out_ch)
)
# 跳跃连接:如果输入输出维度不匹配(stride≠1或通道数变化),则用1x1卷积调整
self.downsample = nn.Sequential(
nn.Conv2d(in_ch, out_ch, 1, stride=stride, bias=False),
nn.BatchNorm2d(out_ch)
) if stride != 1 or in_ch != out_ch else nn.Identity()
self.relu = nn.ReLU()
def forward(self, x):
# 残差连接:主路径输出 + 跳跃连接输出,然后经过ReLU
return self.relu(self.conv(x) + self.downsample(x))
# ResNet18主网络
class ResNet18(nn.Module):
def __init__(self, num_classes=10):
super().__init__()
# 网络结构:一个初始的7x7卷积 + 4个残差层 + 全局平均池化 + 全连接
self.net = nn.Sequential(
# 初始层:7x7卷积,步长2, padding=3,输出尺寸减半
nn.Conv2d(3, 64, 7, stride=2, padding=3, bias=False),
nn.BatchNorm2d(64),
nn.ReLU(),
nn.MaxPool2d(3, stride=2, padding=1), # 再减半
# 四个残差层,每个层包含若干个BasicBlock
self._layer(64, 64, 2, 1), # 第1层:2个残差块,步长1,尺寸不变
self._layer(64, 128, 2, 2), # 第2层:2个残差块,步长2,尺寸减半
self._layer(128, 256, 2, 2), # 第3层:2个残差块,步长2,尺寸减半
self._layer(256, 512, 2, 2), # 第4层:2个残差块,步长2,尺寸减半
nn.AdaptiveAvgPool2d((1, 1)), # 全局平均池化,输出1x1
nn.Flatten(), # 展平
nn.Linear(512, num_classes) # 全连接分类
)
# 辅助函数:构建一个残差层
def _layer(self, in_ch, out_ch, num_blocks, stride):
# 第一个残差块可能需要下采样(因为stride可能不为1或通道变化)
layers = [BasicBlock(in_ch, out_ch, stride)]
# 后续残差块:输入输出通道一致,步长固定为1
for _ in range(1, num_blocks):
layers.append(BasicBlock(out_ch, out_ch, 1))
return nn.Sequential(*layers)
def forward(self, x):
return self.net(x)代码中,nn.Identity()是PyTorch中一个"什么都不做"的层:输入是什么,输出就是什么。它在跳跃连接不需要调整维度时充当占位符,使代码更加简洁统一。
通过这种残差结构,ResNet成功地训练出了超过100层的网络,并在ImageNet上取得了突破性成绩。现在,ResNet已经成为计算机视觉领域的基石,广泛应用于分类、检测、分割等任务中。
14.5 U-Net
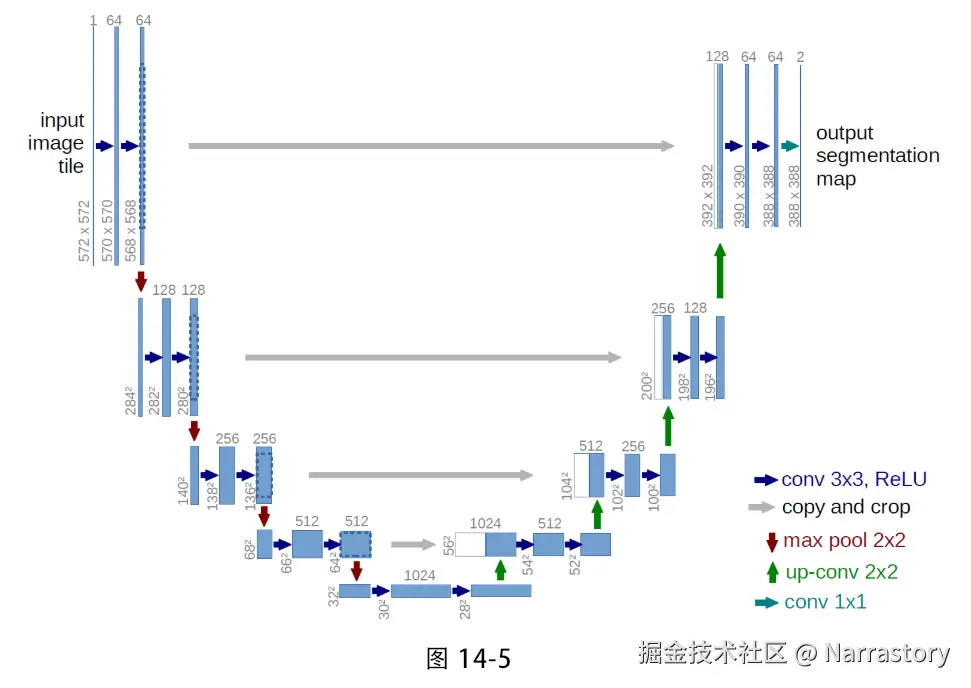
U‑Net 是图像分割领域里程碑式的模型,尤其在医学影像分析等需要精细分割的任务中应用极广。它由 Olaf Ronneberger 等人在 2015 年提出,凭借优雅的对称结构和跳跃连接,在仅有少量训练样本时依然能取得优异的分割效果。
U‑Net 的结构如图 14‑5 所示,因整体形状酷似英文字母"U"而得名。从图中可以清晰地看到,模型分为左侧的编码器 和右侧的解码器 。编码器通过卷积和下采样逐步提取高层语义特征,同时空间分辨率不断降低;解码器则通过上采样逐步恢复细节信息,最终输出与输入同尺寸的分割图。而位于同一层左右两侧之间的跳跃连接,将编码器的特征直接拼接到解码器对应层,弥补了下采样过程中丢失的空间信息,这是 U‑Net 能够精确定位目标边界的关键。
组成 U‑Net 的基础模块主要有四类:
- DoubleConv:每个阶段的核心,连续两次"卷积 + 批归一化 + ReLU"操作,用于提取特征。
- Down:下采样模块,先进行最大池化(将特征图尺寸减半),再接一个 DoubleConv。
- Up:上采样模块,先通过转置卷积或双线性插值放大特征图,然后与对应编码层的输出拼接,最后经过 DoubleConv 融合特征。
- OutConv:输出层,用 1×1 卷积将通道数映射为类别数,得到最终的分割结果。
下面我们先用 PyTorch 逐一实现这些基础模块,再将它们组装成完整的 U‑Net。这种"搭积木"的方式不仅让代码清晰易读,还方便后续修改和复用。
python
import torch
import torch.nn as nn
import torch.nn.functional as F
python
class DoubleConv(nn.Module):
"""
这是 U‑Net 中最基本的特征提取单元,由两个卷积块堆叠而成。
每个卷积块包含: Conv2d + BatchNorm2d + ReLU。
输入输出特征图的空间尺寸不变(通过 padding=1 保持),通道数可以变化。
"""
def __init__(self, in_channels, out_channels, mid_channels=None):
"""
Args:
in_channels (int): 输入特征图的通道数
out_channels (int): 输出特征图的通道数
mid_channels (int, optional): 中间层的通道数,默认等于 out_channels。
当需要通道数先增后减时(如瓶颈结构)可以指定。
"""
super().__init__()
if not mid_channels:
mid_channels = out_channels
self.double_conv = nn.Sequential(
nn.Conv2d(in_channels, mid_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(mid_channels),
nn.ReLU(),
nn.Conv2d(mid_channels, out_channels, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(out_channels),
nn.ReLU()
)
def forward(self, x):
return self.double_conv(x)
python
class Down(nn.Module):
"""
下采样模块:最大池化后接 DoubleConv
在编码器中使用,通过最大池化将特征图尺寸减半,同时使用 DoubleConv 提取更深层特征。
"""
def __init__(self, in_channels, out_channels):
super().__init__()
self.maxpool_conv = nn.Sequential(
nn.MaxPool2d(2),
DoubleConv(in_channels, out_channels)
)
def forward(self, x):
return self.maxpool_conv(x)
python
class Up(nn.Module):
"""
上采样模块:转置卷积放大特征图,与编码器对应特征拼接,最后 DoubleConv
在解码器中使用,采用转置卷积进行上采样(可学习参数),每次将通道数减半、尺寸加倍。
上采样后需要与来自编码器的跳跃连接特征图拼接,然后进行 DoubleConv 融合特征。
"""
def __init__(self, in_channels, out_channels):
super().__init__()
# 转置卷积:in_channels -> in_channels//2,尺寸加倍
self.up = nn.ConvTranspose2d(in_channels, in_channels // 2, kernel_size=2, stride=2)
# 拼接后的总通道数为 in_channels (因为编码器特征通道数也是 in_channels//2),
# 经过 DoubleConv 压缩到 out_channels
self.conv = DoubleConv(in_channels, out_channels)
def forward(self, x1, x2):
"""
x1: 来自解码器的特征图(下层上采样后的结果,即当前上采样的输入)
x2: 来自编码器的特征图(跳跃连接,来自对称层的输出)
"""
x1 = self.up(x1) # 执行转置卷积上采样
# 处理可能的尺寸不一致(由于池化时的取整操作,x2 和 x1 的 H,W 可能差几个像素)
diffY = x2.size()[2] - x1.size()[2]
diffX = x2.size()[3] - x1.size()[3]
# 对 x1 进行填充,使其尺寸与 x2 一致(左右上下对称填充)
x1 = F.pad(x1, [diffX // 2, diffX - diffX // 2,
diffY // 2, diffY - diffY // 2])
# 将编码器特征 x2 与上采样后的 x1 在通道维度上拼接
x = torch.cat([x2, x1], dim=1)
# 通过 DoubleConv 融合特征并调整通道数至 out_channels
return self.conv(x)
python
class OutConv(nn.Module):
"""
输出卷积:1×1 卷积,将通道数映射为类别数
分割任务中,最终需要为每个像素预测类别,因此用 1x1 卷积将特征图通道数变为 n_classes。
"""
def __init__(self, in_channels, out_channels):
super(OutConv, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size=1)
def forward(self, x):
return self.conv(x)有了这些基础模块,搭建完整的 U‑Net 就像拼图一样简单。我们只需按照结构顺序定义各个模块,并在 forward 函数中明确数据的流动路径。
python
class UNet(nn.Module):
"""
编码器-解码器结构,包含4次下采样和4次上采样,所有上采样均使用转置卷积。
输入图像尺寸任意(但需保证经过下采样后能被2的4次方整除),输出与输入同尺寸的分割图。
"""
def __init__(self, n_channels, n_classes):
"""
n_channels (int): 输入图像的通道数(如 RGB 为3)
n_classes (int): 分割类别数(包括背景)
"""
super(UNet, self).__init__()
self.n_channels = n_channels
self.n_classes = n_classes
# ----------------- 编码器(下采样路径)-----------------
# 输入层:DoubleConv,将输入通道转换为64
self.inc = DoubleConv(n_channels, 64) # 输出: 64通道,尺寸不变
# 第1次下采样:64 -> 128,尺寸减半
self.down1 = Down(64, 128) # 输出: 128通道,H/2, W/2
# 第2次下采样:128 -> 256,尺寸再减半
self.down2 = Down(128, 256) # 输出: 256通道,H/4, W/4
# 第3次下采样:256 -> 512,尺寸减半
self.down3 = Down(256, 512) # 输出: 512通道,H/8, W/8
# 第4次下采样(最底层):512 -> 1024,尺寸减半
self.down4 = Down(512, 1024) # 输出: 1024通道,H/16, W/16
# ----------------- 解码器(上采样路径)-----------------
# 第1次上采样:从最底层开始,输入1024,输出512
self.up1 = Up(1024, 512) # 与 down3 的输出 (512) 拼接
# 第2次上采样:输入512,输出256
self.up2 = Up(512, 256) # 与 down2 的输出 (256) 拼接
# 第3次上采样:输入256,输出128
self.up3 = Up(256, 128) # 与 down1 的输出 (128) 拼接
# 第4次上采样:输入128,输出64
self.up4 = Up(128, 64) # 与 inc 的输出 (64) 拼接
# 输出卷积:将64通道映射为类别数 n_classes
self.outc = OutConv(64, n_classes)
def forward(self, x):
"""
x: 输入图像张量,形状为 (batch, n_channels, H, W)
Returns: 分割预测张量,形状为 (batch, n_classes, H, W)
"""
# 编码器前向,保存每次下采样前的输出,用于跳跃连接
x1 = self.inc(x) # 第1层输出,64通道,尺寸 H, W
x2 = self.down1(x1) # 第2层输出,128通道,H/2, W/2
x3 = self.down2(x2) # 第3层输出,256通道,H/4, W/4
x4 = self.down3(x3) # 第4层输出,512通道,H/8, W/8
x5 = self.down4(x4) # 最底层输出,1024通道,H/16, W/16
# 解码器前向,每次上采样时传入对应的编码器特征
x = self.up1(x5, x4) # 与 x4 (512通道) 跳跃连接
x = self.up2(x, x3) # 与 x3 (256通道) 跳跃连接
x = self.up3(x, x2) # 与 x2 (128通道) 跳跃连接
x = self.up4(x, x1) # 与 x1 (64通道) 跳跃连接
logits = self.outc(x) # 输出层,得到类别数通道的分割图,尺寸与 x1 相同(即原图尺寸)
return logits至此,一个完整可用的 U‑Net 模型便搭建完成了。你可以根据实际任务调整初始通道数、深度或上采样方式。代码中使用了 nn.BatchNorm2d 加速训练收敛,bias=False 是因为卷积后紧接 BN,偏置会被抵消。
如果你对某些函数(如 nn.ConvTranspose2d、F.pad 的用法)还不熟悉,别担心------这正是你主动查阅文档、深入学习的绝佳机会。掌握这种"模块化"构建网络的思路后,你就能轻松实现更多复杂的模型了。
十五. 卷积的使用技巧
在前面的章节中,你已经学会了如何搭建一个基本的卷积神经网络(CNN)。但当你开始自己设计网络时,可能会遇到很多问题:卷积核应该设多大?通道数设多少才合适?网络到底要建多深?本章将结合前人积累的宝贵经验,为你总结一套实用的卷积使用技巧。记住,没有绝对"正确"的答案,最好的参数往往取决于你的具体数据和任务。多尝试不同的配置,观察训练过程中的损失和准确率变化,使用验证集进行客观评估,这才是根本。而阅读经典的网络架构并借鉴它们的设计思路,是快速提升设计能力的最佳途径。
15.1 卷积核大小的选择
卷积核是卷积层的核心,它决定了每次提取特征的感受野大小。
- 3×3卷积------最主流的选择 在当今的卷积神经网络中,
3×3的小卷积核已经成为绝对的主流。为什么它这么受欢迎?- 参数少 :一个
5×5卷积核有25个权重参数,而两个堆叠的3×3卷积核(中间有非线性激活)能达到相同的感受野,但参数只有2×3×3=18个,并且引入了更多的非线性变换,让网络表达能力更强。 - 更深的网络 :三个
3×3卷积核堆叠可以等效于一个7×7卷积核(27个参数 vs 49个参数),既节省了参数,又加深了网络,提升了模型容量。 小技巧 :在大多数情况下,优先使用3×3卷积,并配合padding=1保持输入输出尺寸一致。
- 参数少 :一个
- 1×1卷积------通道变换
1×1卷积看起来似乎不提取空间信息(它只关注单个像素点),但它却是非常强大的工具:- 降维/升维:灵活地改变通道数,例如将256个通道压缩到64个,减少后续计算量。
- 跨通道信息融合:让不同通道的信息在同一个位置进行线性组合。
- 引入非线性 :在
1×1卷积后接激活函数,可以在不改变空间尺寸的情况下增加非线性。 小技巧 :当你想减少计算量或增加网络深度时,多用1×1卷积,它经常出现在高效网络和残差模块中。
- 大卷积核(5×5、7×7)的应用场景 大卷积核现在用得较少,但并非一无是处。在网络的第一层 ,有时需要对输入图像(如224×224)进行快速下采样,这时一个
7×7大核配合步长2能迅速降低分辨率,同时捕捉较大范围的初始特征(经典网络如AlexNet、VGG16的第一层就用到了大核)。除此之外,一般建议用多个小卷积核堆叠代替大核。
15.2 卷积层通道数的设计
通道数决定了卷积层提取的特征种类数量。你可以把每个通道想象成一种"特征探测器",通道数越多,网络能探测到的特征模式就越丰富。
- 通道数随深度增加而增加 这是最常见的模式:浅层网络提取边缘、纹理等低级特征,需要的探测器较少;深层网络要组合这些低级特征形成部件、物体等高级语义,需要更多的探测器。 典型增长模式:
64 → 128 → 256 → 512或32 → 64 → 128 → 256。 - 确定起点通道数 对于小型数据集或简单任务,可以从较小的基数开始,比如16、32、64;对于稍复杂的数据集,可以从32或64开始。千万不要一开始就设置512这样的大通道数,否则模型庞大、训练慢且容易过拟合。
- 下采样时翻倍通道数 当特征图的空间尺寸减半时(通过步长2卷积或池化),通常会将通道数翻倍。这样做可以补偿空间信息损失,保持模型表达能力。例如:
[Conv 64] → 下采样 → [Conv 128] → 下采样 → [Conv 256]。
15.3 网络深度
网络的深度(即卷积层的数量)直接影响模型的表达能力。
- 从浅到深,逐步增加
- 对于入门任务(如MNIST),2~4个卷积层+1~2个全连接层就足够了(比如LeNet-5只有2个卷积层)。
- 对于中等难度任务(如CIFAR-100),4~8个卷积层是常见范围。
- 对于ImageNet这样的大型数据集,往往需要十几层到上百层(如ResNet有18、50、101层)。 强烈建议 :第一个模型先从3~4个卷积层开始,确保它能正常训练并达到基础准确率。如果模型欠拟合(训练集准确率也低),再逐步增加深度或宽度。
- 警惕过深带来的问题 过深的网络在小数据集上极易过拟合,且可能遭遇梯度消失/爆炸。此时需要配合正则化技术(如Dropout、BatchNorm)或引入残差连接(ResNet的核心思想)来帮助训练。
15.4 池化层的选择
平均池化和最大池化是两种最常用的池化方式,它们各有特点,适用于不同的场景。
| 特性 | 平均池化 | 最大池化 |
|---|---|---|
| 计算方式 | 取局部区域的平均值 | 取局部区域的最大值 |
| 保留信息 | 保留区域的整体特征,平滑细节 | 保留最显著的特征(如边缘、纹理) |
| 抗噪能力 | 强,对噪声不敏感 | 弱,噪声可能被放大 |
| 适用场景 | 需要平滑特征、背景区域 | 需要突出边缘、关键点 |
| 梯度传播 | 梯度均匀分配给窗口内所有像素 | 梯度只传递给窗口内最大值所在的像素 |
选择建议:
- 图像分类:在网络的深层,特征图已经包含了高级语义信息,此时使用平均池化可以更好地保留类别整体的响应,因此很多分类网络(如 ResNet)在最后使用全局平均池化(Global Average Pooling)来将特征图转换为特征向量。
- 目标检测/定位:在网络的浅层,需要保留精确的空间位置信息,最大池化更能突出物体的边缘和关键点,因此常用最大池化。
- 现代网络设计:许多网络会混合使用两种池化,或者用可学习的下采样层(如步长卷积)来替代它们。但池化层因其简单、无参、高效的特点,仍然是很多模型的标配。
如何选择池化窗口大小?
- 常用大小:2×2 是最常见的,因为它能让特征图尺寸减半,同时计算简单。
- 输入尺寸:如果输入图像很大,可以在前几层使用稍大的窗口(如 5×5)快速降低分辨率;但这样会丢失较多细节,需谨慎。
- 网络深度:浅层特征图较大,使用较小窗口(2×2)逐步降维;深层特征图已经很小,甚至可以用全局平均池化(窗口等于整个特征图)直接得到一维向量。
平均池化会丢失重要信息吗?
平均池化的本质是平滑,它会抹掉局部区域的细节,只保留整体的平均响应。因此,对于需要精细纹理信息的任务(如纹理分类、风格迁移),过度使用平均池化可能导致信息丢失。但在深层网络中,特征图已经抽象为高级语义,细节反而可能是噪声,此时平均池化能起到稳定特征的作用。所以,使用平均池化时要根据任务需求权衡:浅层慎用,深层多用。
如果你想快速下采样,也可以使用带步长的卷积代替池化。现代网络越来越倾向于使用带步长卷积,因为卷积本身能学习下采样的方式。也可以用全局平均池化替代最后的全连接层,大幅减少参数。