一、MMC数学模型
图1是MMC的等效电路图,换流器的交流侧可通过变压器与交流系统连接。该侧的相电压和线电流分别 和
和 (
( );
); 为桥臂串联电抗器的电感值;电阻
为桥臂串联电抗器的电感值;电阻 用来等效整个桥臂的损耗;
用来等效整个桥臂的损耗; 为直流电压;
为直流电压; 为直流电流。各子模块构成的桥臂电压可用6个受控电压源
为直流电流。各子模块构成的桥臂电压可用6个受控电压源 和
和 来等效,下标p和n分别表示上桥臂和下桥臂。相应的桥臂电流分别为
来等效,下标p和n分别表示上桥臂和下桥臂。相应的桥臂电流分别为 和
和 ,参考方向见图1。
,参考方向见图1。
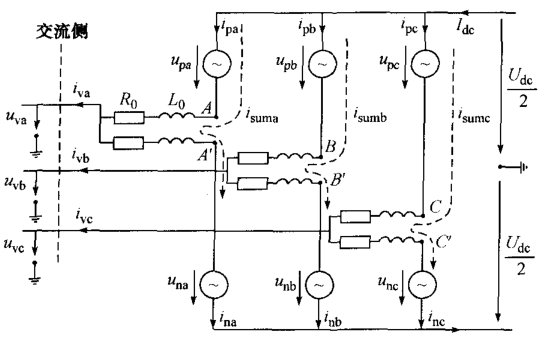
图1 MMC等效电路
桥臂电流可以表示为:
 (1)
(1)
 (2)
(2)
式中, 为交流侧断面的线电流;
为交流侧断面的线电流; ,它实际上是同时流过上、下2个桥臂的换流器内部电流,称为j相内部电流,如图1所示。
,它实际上是同时流过上、下2个桥臂的换流器内部电流,称为j相内部电流,如图1所示。
因此,MMC的数学模型可以用以下2个方程来描述:(同专题2-2的式4)
 (3)
(3)
 (4)
(4)
在式(3)中,不妨假设
 (5)
(5)
将 称为j相的虚拟电动势。根据式(3)可知,通过控制虚拟电动势
称为j相的虚拟电动势。根据式(3)可知,通过控制虚拟电动势 可以间接地对MMC交流测的电压和电流进行控制。因此,式3实际上代表的式MMC外部特性的特征方程。
可以间接地对MMC交流测的电压和电流进行控制。因此,式3实际上代表的式MMC外部特性的特征方程。
式4为代表的MMC内部电压、电流特性的方程,另式4等号左边为:
 (6)
(6)
式中, 可称为j相的内部不平衡压降。
可称为j相的内部不平衡压降。
结合图1和基尔霍夫电压定律可知, 实际表示的是j相内部电流
实际表示的是j相内部电流 在一个桥臂串联电抗上的压降,而这个压降正是由于上、下2个桥臂的电压之和与直流电压不平衡所引起的。
在一个桥臂串联电抗上的压降,而这个压降正是由于上、下2个桥臂的电压之和与直流电压不平衡所引起的。
MMC的各种控制方法,最终要落实到控制三相6个桥臂各自的输出电压 和
和 。为消除各相上、下桥臂电压和之间的不一致性,根据图1和式4,在桥臂电压
。为消除各相上、下桥臂电压和之间的不一致性,根据图1和式4,在桥臂电压 和
和 上同时减去一个大小等于
上同时减去一个大小等于 的修正量,就可以抵消2个串联电抗器两端(AA')之间的电压,同时可间接控制换流器的内部电流
的修正量,就可以抵消2个串联电抗器两端(AA')之间的电压,同时可间接控制换流器的内部电流 。由于这种修正是同时加在同相上、下2个桥臂上,因此根据式5,它不会影响j的虚拟电动势
。由于这种修正是同时加在同相上、下2个桥臂上,因此根据式5,它不会影响j的虚拟电动势 ,从而不会影响MMC的外部特性,即MMC输出的交流电压
,从而不会影响MMC的外部特性,即MMC输出的交流电压 和电流
和电流 不会改变。
不会改变。
本文所采用的内部环流抑制控制器(circulating current suppressing controller, CCSC)。
根据以上思路,在同时满足式3和式4的条件下,可以得到上、下桥臂电压参考值 、
、 的控制率为:
的控制率为:
 (7)
(7)
 (8)
(8)
其中的虚拟电动势 由系统级控制器的输出得到,可以用来控制MMC输出的电压、电流,进而控制有功、无功和相应的直流母线电压等,这与二电平电压源换流器拓扑的控制并无差别。而内部不平衡电压
由系统级控制器的输出得到,可以用来控制MMC输出的电压、电流,进而控制有功、无功和相应的直流母线电压等,这与二电平电压源换流器拓扑的控制并无差别。而内部不平衡电压 则可用来控制MMC的内部动态过程,本文利用它来抑制MMC的内部环流。
则可用来控制MMC的内部动态过程,本文利用它来抑制MMC的内部环流。
二、CCSC设计
MMC内部环流是由各相上、下桥臂电压之和彼此不一致引起的,且此环流以二倍频负序分量为主,它在MMC三相桥臂间流动,对外部交流系统不产生任何影响。因此,每相间的环流实际上是叠加在该相的直流电流上,共同流经同一相的上、下2个桥臂,它们一起构成了式1和式2中的内部电流 。根据以上分析,
。根据以上分析, 应由正常运行的直流电流分量
应由正常运行的直流电流分量 和
和 这2部分组成,由于直流侧电流
这2部分组成,由于直流侧电流 在三相间均匀分配,因此其中的
在三相间均匀分配,因此其中的 大小应为
大小应为 ,而
,而 则是对应MMC的内部环流。
则是对应MMC的内部环流。
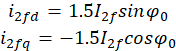
根据专题2-4的式7, 中含有部分2倍频电压,设
中含有部分2倍频电压,设 为等效相单元2倍频环流电压的峰值,假设其在上下两个桥臂中均分。桥臂电压中2倍频分量加在两个桥臂串联电抗器上产生2倍频的电流,设其峰值为
为等效相单元2倍频环流电压的峰值,假设其在上下两个桥臂中均分。桥臂电压中2倍频分量加在两个桥臂串联电抗器上产生2倍频的电流,设其峰值为 。
。
三相的环流 的表达式为:
的表达式为:
 (9)
(9)
 (10)
(10)
 (11)
(11)
式中, 为二倍频环流峰值,
为二倍频环流峰值, 为基波角频率,
为基波角频率, 为初相角。
为初相角。
由式9~10可知,三相环流按a-c-b的相序在三相间来回流动,因此可以采用二倍频负序旋转坐标将二倍频环流分离成2个直流量。
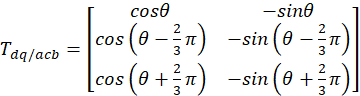
设变换矩阵 为:
为:
 (12)
(12)
式中, ;变换矩阵的相序为a-c-b。
;变换矩阵的相序为a-c-b。
将式6改写为矩阵形式,并按a-c-b的相序列为:
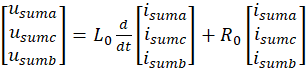 (13)
(13)
将式9~11代入式13,再在等号两边同时左乘变换矩阵 后,有
后,有
 (14)
(14)
式中, 、
、 分别为内部不平衡压降
分别为内部不平衡压降 在二倍频负序旋转坐标系下的dq轴分量;
在二倍频负序旋转坐标系下的dq轴分量; 和
和 分别为二倍频环流在负序旋转坐标系下的dq轴分量:
分别为二倍频环流在负序旋转坐标系下的dq轴分量:
可见,经过二倍频负序旋转坐标变换,三相时变环流可以被分解为2个直流分量,以利于CCSC的设计。
根据式14,可以得到该旋转坐标系下内部不平衡压降的dq分量 、
、 与二倍频环流dq分量
与二倍频环流dq分量 、
、 之间的传递函数框图,如图2。
之间的传递函数框图,如图2。
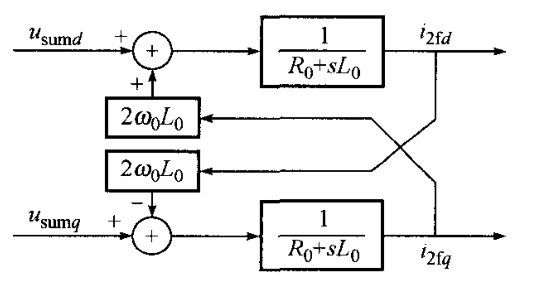
图2 MMC内部环流数学模型
根据以上分析,可以设计相应的CCS如图3所示:
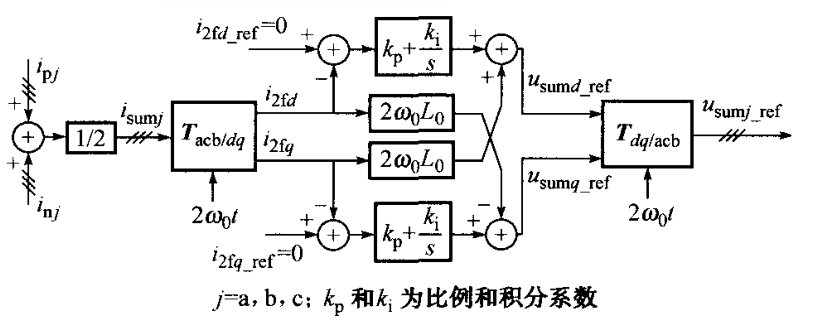
图3 CCSC的控制框图
由式1和式2,首先将三相的桥臂电流 和
和 相加后除以2,得到三相内部电流
相加后除以2,得到三相内部电流 ,经过二倍频负序坐标变换
,经过二倍频负序坐标变换 ,得到MMC内部环流的dq轴分量
,得到MMC内部环流的dq轴分量 和
和 ,将它们与环流dq轴分量的参考值
,将它们与环流dq轴分量的参考值 和
和 (为了抑制环流,这里取
(为了抑制环流,这里取 )相减后,经过比例-积分调节器,再进入电压前馈量
)相减后,经过比例-积分调节器,再进入电压前馈量 和
和 以消除图2中的dq轴耦合部分,即可得到内部不平衡压降的dq轴参考值
以消除图2中的dq轴耦合部分,即可得到内部不平衡压降的dq轴参考值 和
和 。最后经过逆变换
。最后经过逆变换 得到式7和式8中需要的负序三相的内部不平衡压降参考值
得到式7和式8中需要的负序三相的内部不平衡压降参考值 。这里的逆变换为:
。这里的逆变换为:
 (15)
(15)
式中, ;变换矩阵的相序为a-c-b。
;变换矩阵的相序为a-c-b。
包含CCSC的MMC整体控制结构可以根据式7、式8得到(间图4)。图4中的 、
、 为输入外环功率控制器的有功和无功指令值,
为输入外环功率控制器的有功和无功指令值, 、
、 为外环功率控制器输出的d、q轴电流参考值。在加入环流抑制附加控制信号
为外环功率控制器输出的d、q轴电流参考值。在加入环流抑制附加控制信号 后,控制系统最终输出上、下桥臂电压参考信号
后,控制系统最终输出上、下桥臂电压参考信号 和
和 ,然后通过多电平载波移相调制算法生成相应的触发脉冲,进而控制各个子模块的开通于关断。
,然后通过多电平载波移相调制算法生成相应的触发脉冲,进而控制各个子模块的开通于关断。
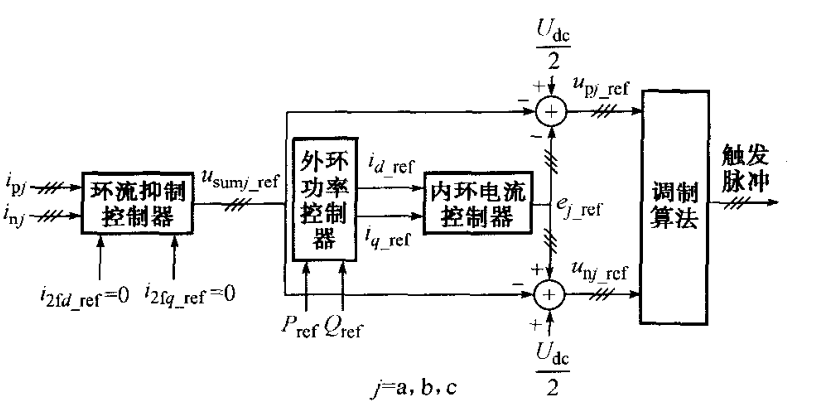
图4 包含CCSC的MMC整体控制结构