前情介绍
硬件:
主机:Jetson orin nano
3d雷达:mid360
软件:
ubuntu22.04
ROS2 humble
操作顺序
-
按照用户手册:网线连接雷达和主机并且给雷达供电12V
-
配置有线网口:

也可以在图形界面配置:
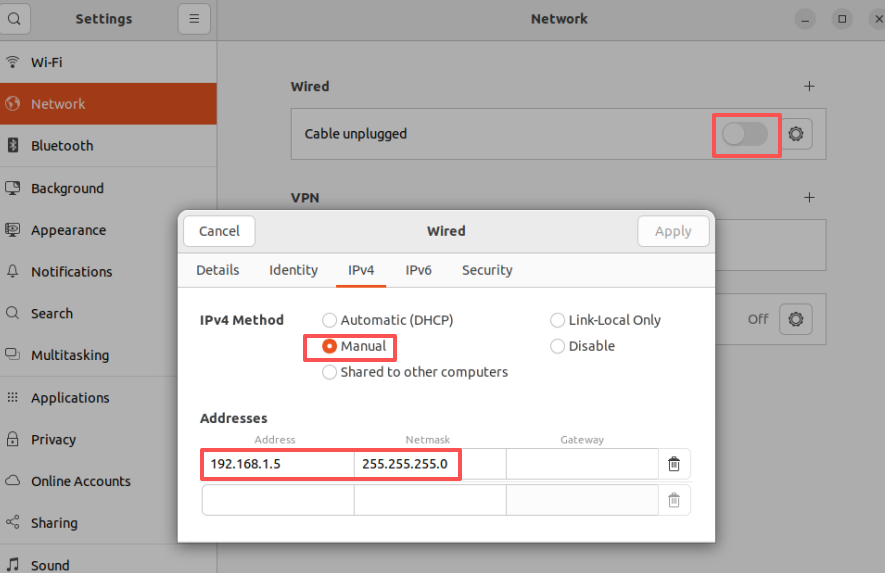
配置完了记得把cable unplugged这个按钮点亮。
- 编译Livox-SDK2、livox_ros_driver2:
bash
https://github.com/Livox-SDK/Livox-SDK2/tree/master
https://github.com/Livox-SDK/livox_ros_driver2- 进入ws_livox目录,运行demo:
bash
cd ws_livox/
source install/setup.sh
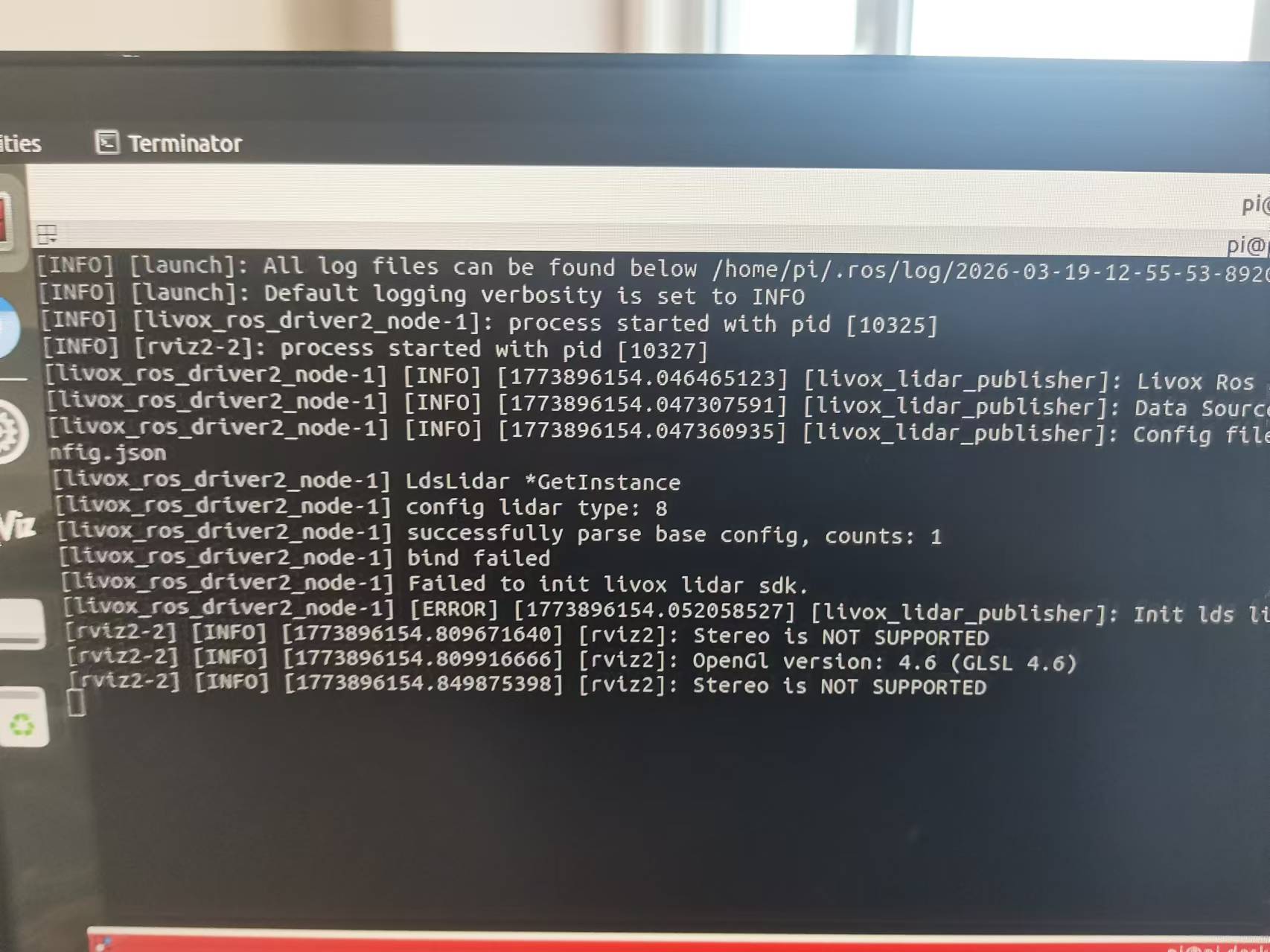
ros2 launch livox_ros_driver2 rviz_MID360_launch.py报错信息
结果什么都不显示,并且报错:bind failed
解决方法
编译完成后,进入:ws_livox/install/livox_ros_driver2/share/livox_ros_driver2/config
需要修改配置文件:MID360_config.json
bash
{
"lidar_summary_info" : {
"lidar_type": 8
},
"MID360": {
"lidar_net_info" : {
"cmd_data_port": 56100,
"push_msg_port": 56200,
"point_data_port": 56300,
"imu_data_port": 56400,
"log_data_port": 56500
},
"host_net_info" : {
"cmd_data_ip" : "192.168.1.5",
"cmd_data_port": 56101,
"push_msg_ip": "192.168.1.5",
"push_msg_port": 56201,
"point_data_ip": "192.168.1.5",
"point_data_port": 56301,
"imu_data_ip" : "192.168.1.5",
"imu_data_port": 56401,
"log_data_ip" : "",
"log_data_port": 56501
}
},
"lidar_configs" : [
{
"ip" : "192.168.1.1xx",
"pcl_data_type" : 1,
"pattern_mode" : 0,
"extrinsic_parameter" : {
"roll": 0.0,
"pitch": 0.0,
"yaw": 0.0,
"x": 0,
"y": 0,
"z": 0
}
}
]
}需要修改两个地方:
-
"lidar_configs" : [ {"ip" : "192.168.1.1xx" 这里的xx修改为产品标签序列码的最后两位
-
host_net_info中所有的IP,要与之前配置的有线网口一致;
也可以在配置有线网口时,配置为这里的"192.168.1.5"
然后运行demo, 就可以在rviz2中看到3d点云数据了:
