近日,东南大学机械工程学院机器人系唐志强副教授、王乾乾教授联合新加坡国立大学Cecilia Laschi 教授和美国工程院院士、麻省理工学院 Daniela Rus 教授团队在国际顶级综合性学术期刊 Science Advances 发表题为"A general soft robotic controller inspired by neuronal structural and plastic synapses that adapts to diverse arms, tasks, and perturbations"的研究论文,提出了一种面向软体机器人的通用学习与控制框架,在多任务执行、复杂环境适应以及跨平台泛化方面取得重要进展(图1)。
论文链接:
https://www.science.org/doi/10.1126/sciadv.aea3712
图1.论文发表页面
软体机器人因其高柔顺性和强环境适应能力,在服务机器人、医疗辅助、人机交互等领域具有广阔应用前景。然而,其连续形变、高维非线性动力学特性也使得传统建模与控制方法难以在复杂、多变环境中稳定工作。针对上述挑战,**研究团队提出了一种受生物神经元结构与可塑性启发的学习控制框架(图2)。**该方法将控制策略划分为两类功能模块:一方面,通过离线学习获得结构性表征,捕捉不同软体机械臂与任务之间的共性控制规律;另一方面,在实际运行过程中引入在线可塑性调节机制,使系统能够根据实时误差信息快速适应当前结构与环境变化。同时,研究引入稳定性约束,确保控制策略在在线更新过程中保持可预测、稳定的行为。
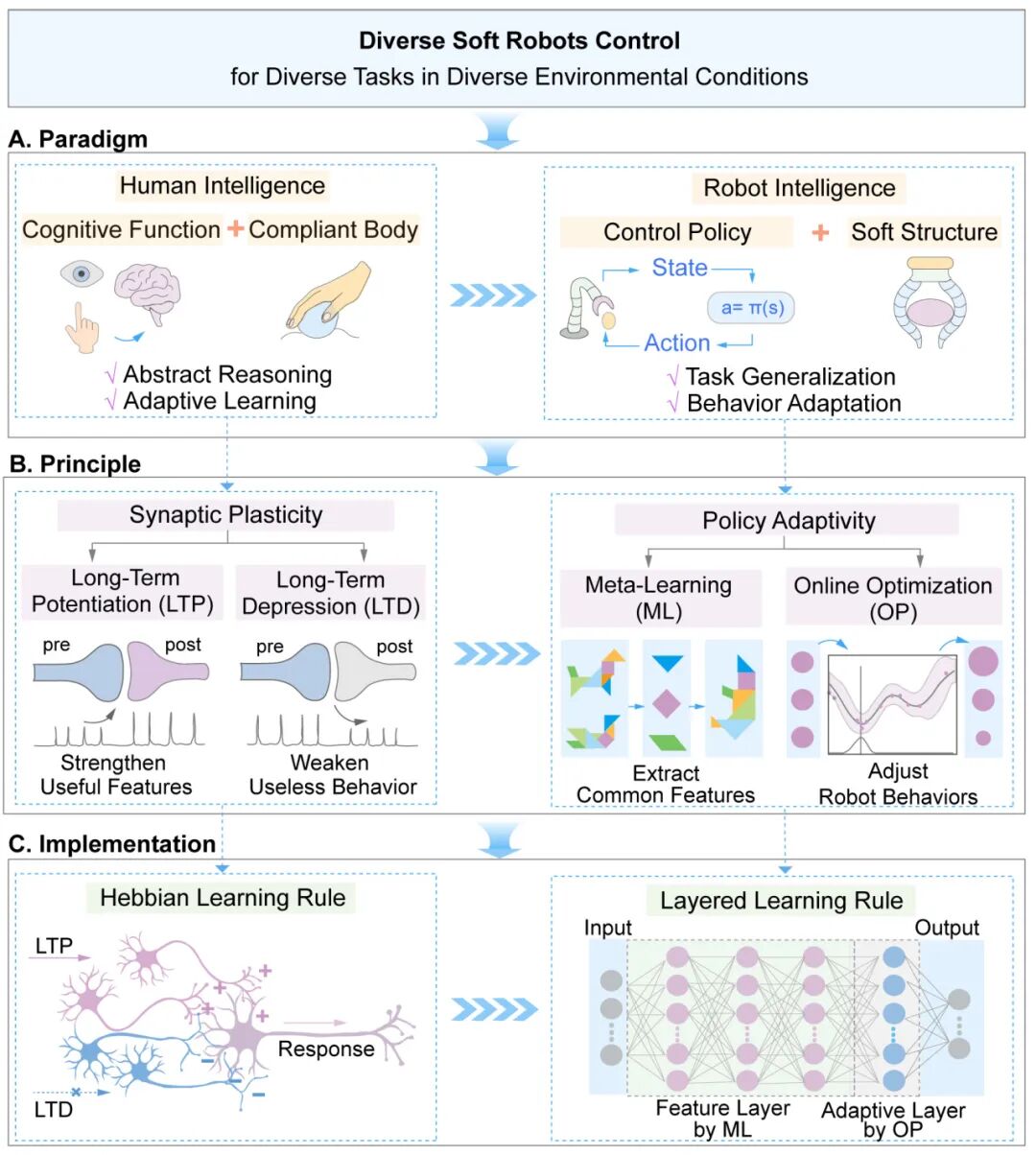

图2. 受神经元突触可塑性启发的分层学习机制
研究团队在多种真实软体机械臂平台上对该方法进行了系统验证,包括绳驱软体臂与形状记忆合金驱动软体臂。实验任务涵盖轨迹跟踪、物体操作以及整体形态控制等典型场景(图3)。实验结果表明,该控制框架能够在负载连续变化、环境扰动以及执行器部分失效等复杂条件下保持较高控制精度和稳定性,显著优于传统方法,展示了良好的鲁棒性与泛化能力。该成果融合了软体机器人、机器学习与控制理论等多学科优势。研究工作不仅为软体机器人在未知环境中的自主运行提供了新的技术路径,也为构建具有"感知---决策---执行"闭环能力的智能软体机器人系统奠定了理论与方法基础。论文的发表标志着我院在软体机器人智能控制方向取得又一重要进展,进一步提升了学院在机器人与智能系统领域的国际学术影响力。
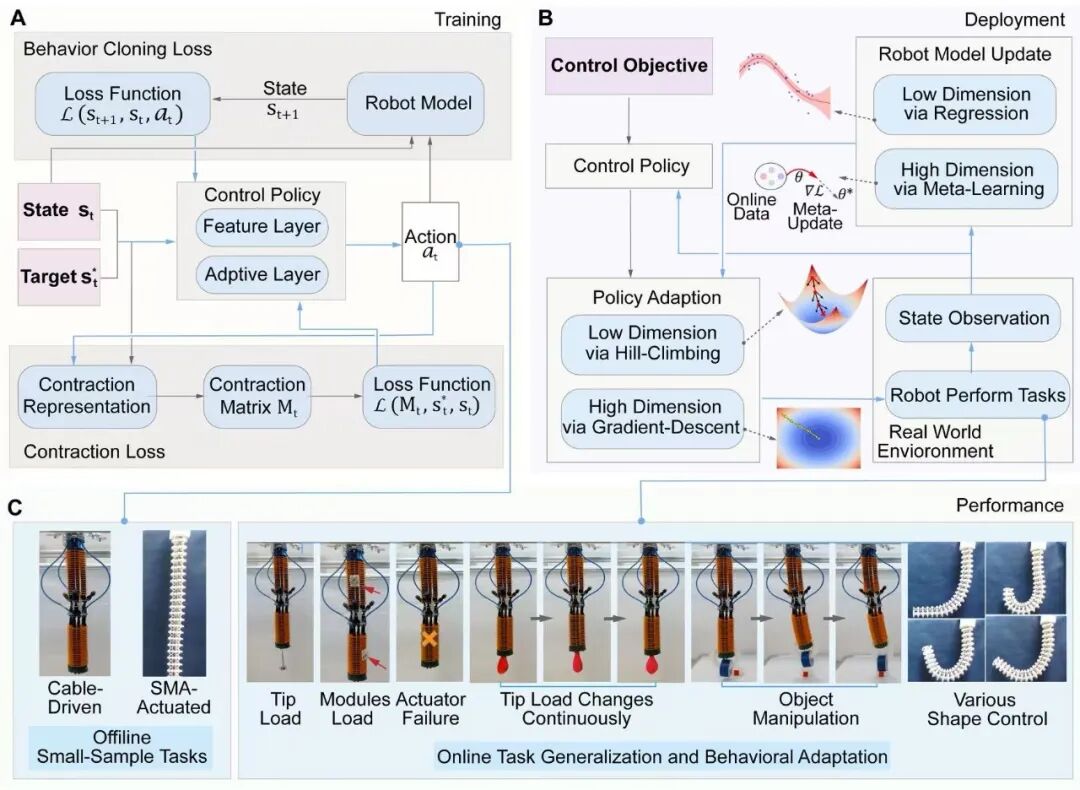
图3.机器学习驱动的通用控制框架