研究课题:
基于蚁群算法的机器人最短路径规划问题
关键词:
蚁群算法; 栅格地图; 最短路径规划; Matlab
改进方向:
无
课题说明:
移动机器人路径规划时机器人学的一个重要研究领域,它要求机器人依据某个或某个优化原则(如最小能量消耗、最短路径规划、最短行走时间等等),在其工作空间中寻找一条从起始状态到目标位置的能避开所有障碍物的最优路径。机器人路径问题可以建模为一个有约束的优化问题,都要完成路径规划、起始位置和终止位置定位以及障碍物避障的问题。
局部路径规划:基于部分区域信息理解的路径规划------局部路径规划是在机器人执行任务过程中根据自身携带传感器采集到的局部环境信息进行的实时动态路径规划,具有较高的灵活性和实时性。但由于依靠的是局部环境特征,其获得的路径可能只是局部最优而非全局最优,甚至是目标不可达路径。
全局路径规划:基于完整区域信息理解的路径规划------首先需要 根据已知的全局环境信息,建立抽象的全区域环境地图模型,然后在全区域地图模型上使用寻优搜索算 法获取全局最优或较优路径,最终引导移动机器人在真实情况下向目标点安全的移动。其主要涉及两部分内容: 一是环境信息理解及地图模型构建,二是全局路径搜索及机器人引导。
移动机器人路径规划中,需要融合兼用全局和局部路径规划,前者旨在寻找全局优化路径,后者旨在实时避障。 移动机器人的路径规划中最关键部分就是选取算法, 一个优秀的算法对路径规划起到至关重要的作用。
算法流程:
1)输入由0和1组成的矩阵表示机器人需要寻找最优路径的地图
2)输入初始的信息素矩阵,选择初始点和终止点并且设置各种参数。在此次计算
中,设置所有位置的初始信息素相等。
3)选择从初始点下一步可以到达的节点,根据每个节点的信息素求出前往每个节
点的概率,并利用轮盘算法选取下一步的初始点
4)更新路径以及路程长度。
5)重复(3)、(4)过程,直到蚂蚁到达终点或者无路可走。
6)重复(3)、(4)、(5),直到某一代m 只蚂蚁迭代结束。
7)更新信息素矩阵,其中没有到达的蚂蚁不计算在内。
8)重复(3)~(7),直至第n代蚂蚁迭代结束。
待改进方向:
- 自适应蚁群算法
- 蚂蚁系统
- 精英蚂蚁系统
- 最大-最小蚂蚁系统
- 基于排序的蚁群算法
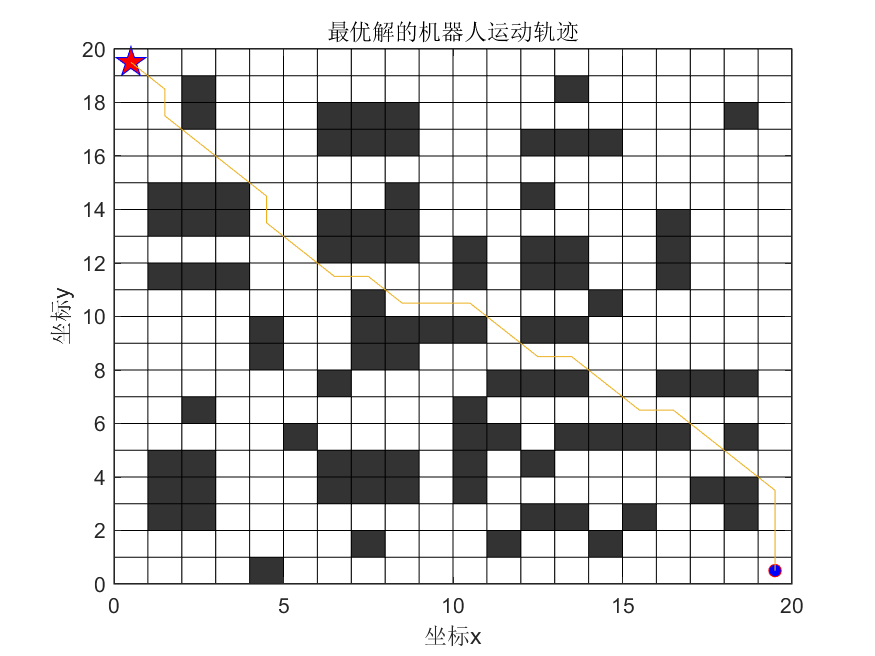
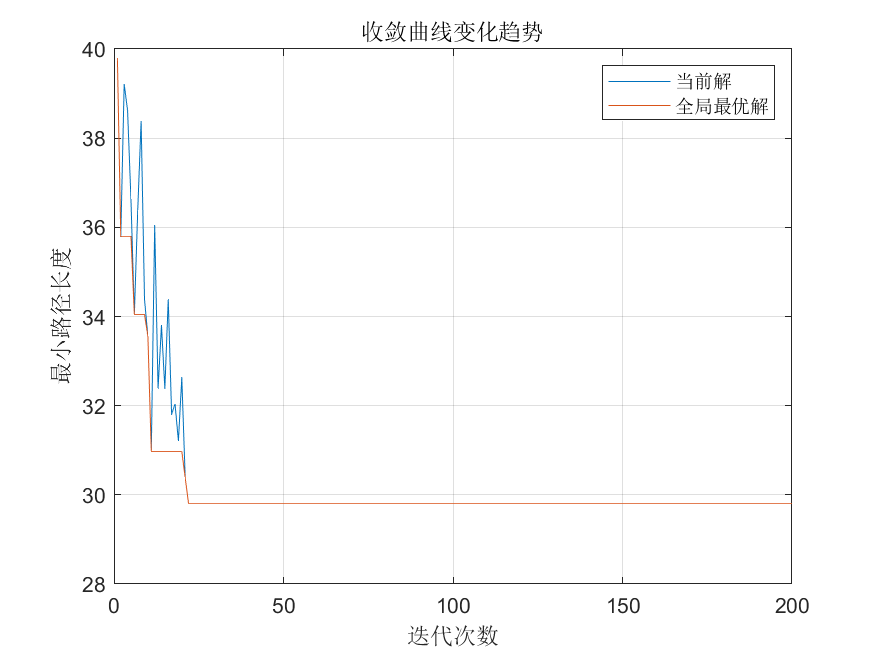
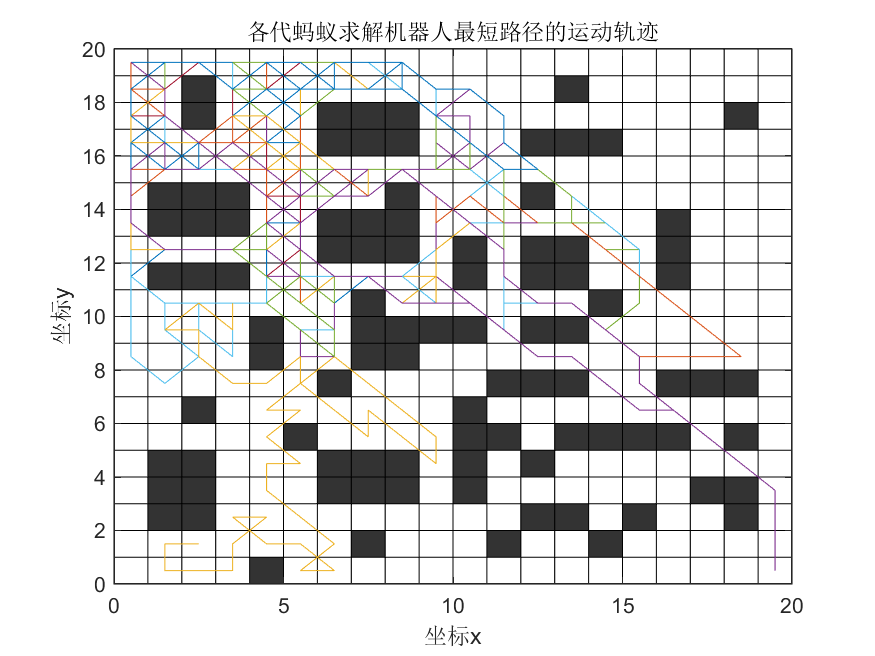
Matlab仿真结果: