⒈ 训练主题
⑴掌握西门子1200 PLC通过FB284模块实现V90PN伺服定位的控制方法;
⑵掌握V90PN伺服硬件驱动配置方法和注意事项;
⑶掌握通过编程实现V90PN伺服驱动变位机正反转180°的方法。
⒉ 硬件及软件配置
⑴硬件配置
①西门子S7-1200PLC:规格:1214DC/DC/DC 型号:6ES7 214-1AG40-0XB0
②西门子V90PN绝对值伺服:<1>伺服电机(3.5kW多圈绝对值/带键槽/带抱闸/高惯量):1FL6092-1AC61-2LA1;<2>伺服控制器(3.5kW):6SL3210-5FE13-5UF0;<3>编码器电缆(5m):6FX3002-2CT12-1AF0;<4>抱闸电缆(5m):6FX3002-5BL03-1AF0;<5>动力电缆(5m):6FX3002-5CL12-1AF0。
⑵软件配置
①博途软件:TIA Portal V15
②V90PN配置软件:V-ASSISTANT(版本:V1.7)
⒊ 硬件接线
西门子S7-1200PLC与V90PN的硬件接线(含网络)详见图纸附件1。
⒋ 软件组态及配置设置
⑴博途组态及配置
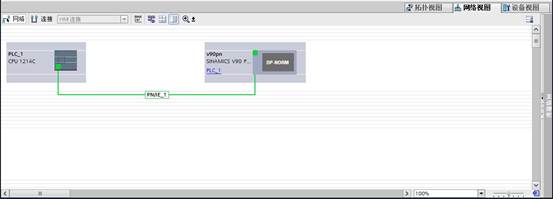
①打开博途软件,添加S7-1200系列PLC的型号6ES7 214-1AG40-0XB0或通过"非特定CPU 1200"加载后在线识别硬件的方式组态1200PLC。点击右侧鼠标选中"硬件目录>其它现场设备>PROFINET IO>Drivers>SINAMICS AG>SINAMICS>SINAMICS V90PN V1.0",将其拖拽至"网络视图"界面,将V90PN网口拖至PLC的网口建立"PN/IE"连接如下图所示:
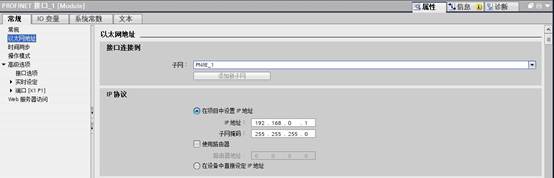
②点击分配PLC的IP地址(192.168.0.1)如下图:
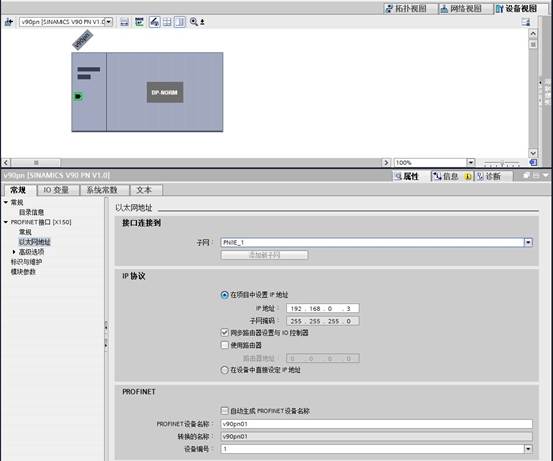
点击分配V90PN的IP地址(192.168.0.3)和PROFINET设备名称(v90pn01)如下图,(注意V90PN的IP地址(192.168.0.3)和PROFINET设备名称(v90pn01)要与接下来 V90PN伺服配置软件V-ASSISTANT对本伺服设置的IP和设备名称要完全一致):
③点击V90PN在"设备视图"打开"设备概览",如下图将"西门子报文111,PZD-12/12"拖入到图示位置:

⑵ V-ASSISTANT调试
新版V-ASSISTANT可以通过数据线或网线接口实现对V90PN的调试和配置设置,打开V-ASSISTANT软件,在通信正常情况下,V-ASSISTANT能够自动设备所连接的当前V90PN设备。如下图在配置之前,为确认伺服控制器是否受控,在"Jog"下点击"伺服开使能",此时伺服控制器启动,速度设置为"50"(不建议设置过高转速,速度高伺服电机启动冲击过大,可能造成意外人身伤害和设备损坏。),电机"左旋转"或"右旋转"按钮,此时点击相应左旋转和右旋转,说明伺服控制器受控,调试完成后点击"伺服关使能",关闭"Jog"调试。

⑶V-ASSISTANT的配置设置
①控制模式选择,在"选择驱动"界面下,"控制模式"选择"基本定位器控制(EPOS)"如下图:

②在下图所示界面配置报文,当前报文选择"西门子报文111,PZD-12/12",与上文博途组态V90PN伺服的报文一致:

③如下图配置网络,其中"PN站名"为"v90pn01","PN站的IP地址"为"192.168.0.3",这两处设置需与上文中博途软件对应V90PN的配置相一致。然后点击"保存并激活",成功后右侧将出现与左侧相一致的配置显示。

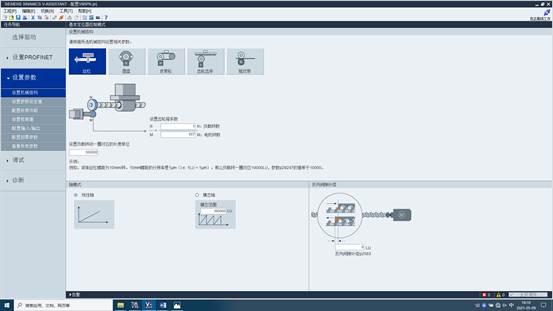
④如下图设置机械结构,其中M表示减速比,此处减速比为557,"设置负载转动一圈对应的长度单位",此处为360000(表示负载转动一圈需要360000LU)。
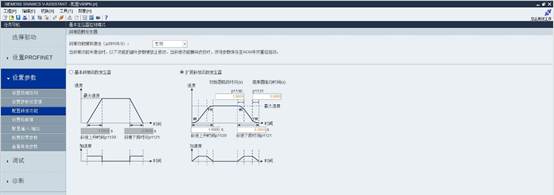
⑤斜波函数发生器设置,为改善伺服启停特性,通常选择"扩展斜坡函数发生器"并根据设备运行特性改变设置参数。
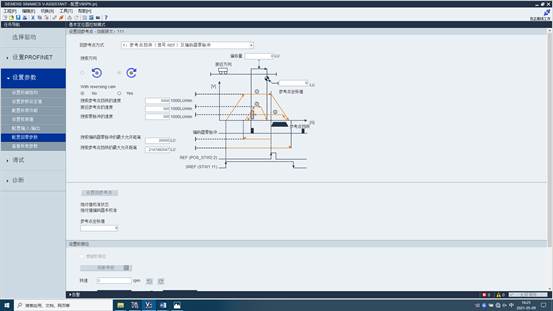
⑥设置回参考点,如下图通过JOG模式可将设备调至参考点位置,由于本伺服为绝对值型,故在JOG模式下将设备调整至合适位置,关闭JOG模式,将"参考点坐标值"改为"0",点击下图"设置回参考点",此时V90PN伺服将记住当前绝对零点位置。
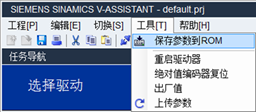
配置参数设置完成后保存并下载,将点击"工具-保存参数到ROM",将设置参数保存到ROM中,参数配置将保存到伺服控制器中,此后基于该模式下的控制不需再启动V-ASSISTANT软件进行参数配置。点击"工程-保存工程",根据提示保存该工程到相应文件夹内。
⒌ 博途编程调试
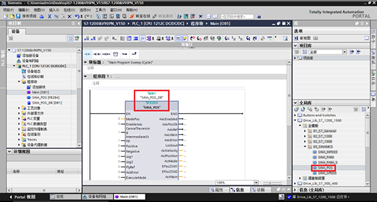
在OB1 中将指令库中下述路径中的"SINA_POS(FB284)"功能块拖曳到编程网络中,双击"项目树-设备-PLC_11212C DC/DC/DC-程序块-MainOB1",在弹出编程界面上,双击"库-全局库-Drive_Lib_S7_1200_1500-主模板-03_SINAMICS-SINA_POS",即将"SINA_POS(FB284)"功能块拖曳到编程网络中如下图:
通过FB284模块控制V90PN伺服的应用案例程序及基于FB284模块不同模式下的控制及端口功能详见附件2和附件3。