本学习内容来自机器人工匠阿杰,个人整理笔记方便后续学习
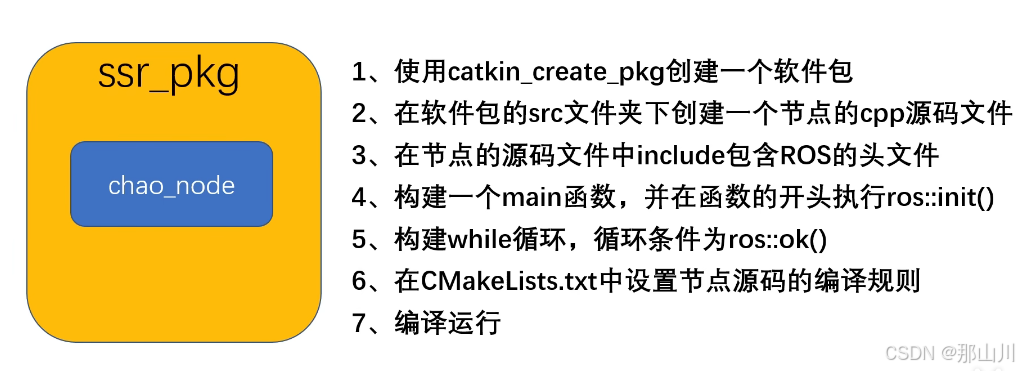
node节点和package包

topic与message
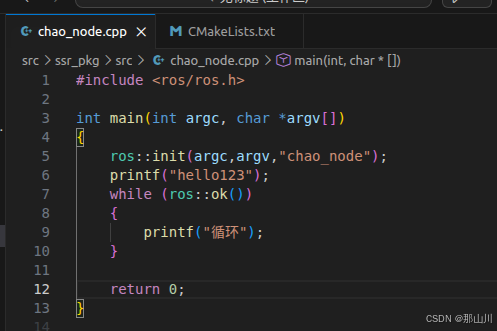
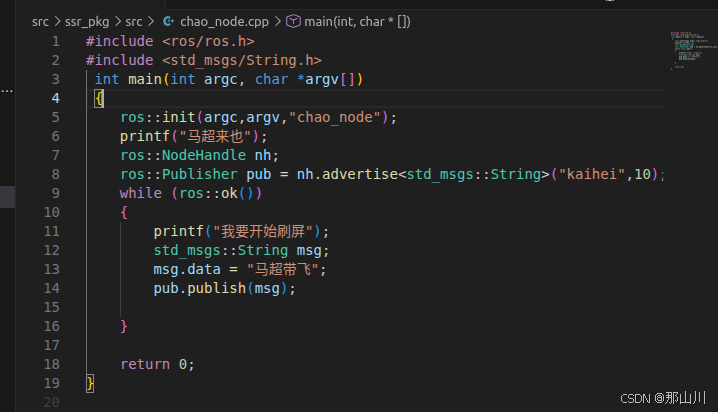
1.进行ros::init 初始话这个chao_node 节点
2.构建node大管家 ros::NodeHandle nh
3.构建发布者(消息类型 话题 队列大小)
ros::Publisher pub = nh.advertise<std_msgs::String>("kaihei",10);
4.定义消息类型 std_msgs::String msg;
5.定义要发送的数据内容 msg.data = "马超带飞";
6.消息发布 pub.publish(msg);
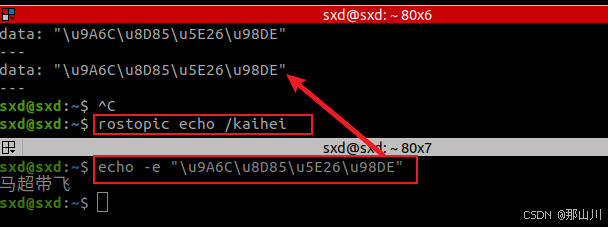
查看活跃着的话题列表

rostopic echo 话题名称 (话题不能使用中文) 查看话题内容
echo -e 字符串 可以进行输出并解析转义字符
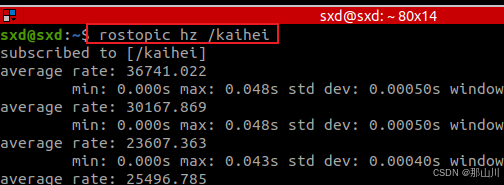
查看话题发送的频率
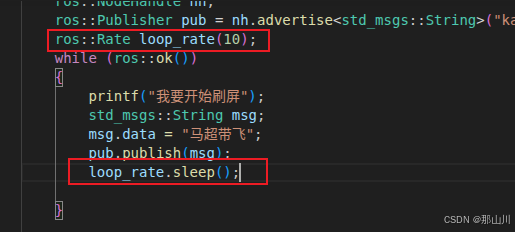
可通过ros::Rate 定义变量来控制消息发送频率 比如10s/次
在消息发布后进行.sleep
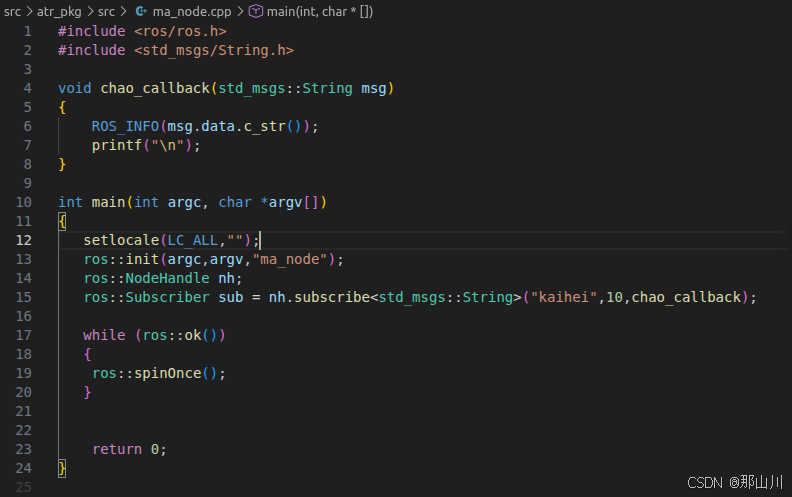
消息订阅
ros::init 初始化
ros::NodeHandle nh 大管家
3.ros::Subscriber sub = nh.subscribe<std_msgs::String>("kaihei",10,chao_callback)
4.这样就可以去定义回调函数接收topic为kaihei的消息了 chao_callback这个名称随便定义
5.void chao_callback(std_msgs::String msg)
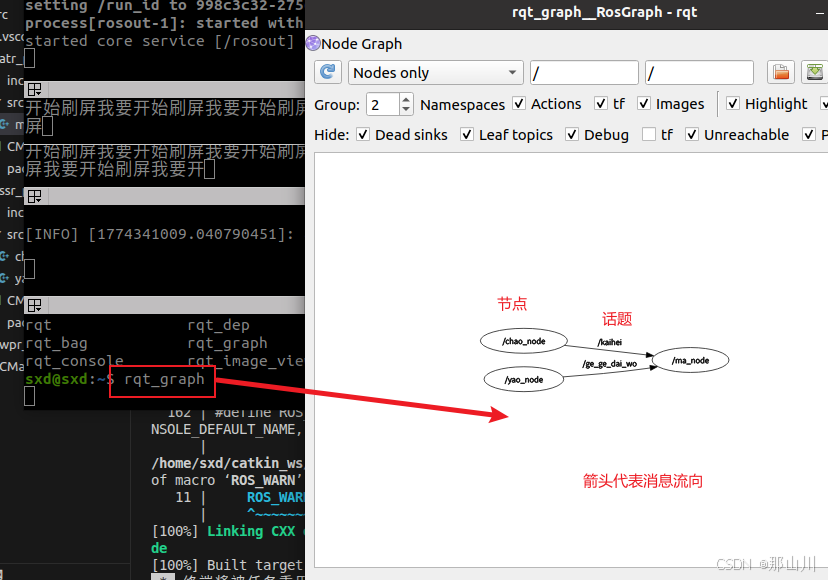
通过rqt_graph 图形化显示当前系统活跃的节点以及节点间的话题通讯关系。