摘要: 化工园区的自动化升级面临着极端物理环境与严苛安全标准的双重挑战。巡检机器人的跨层调度作为典型的 OT 与 IT 融合场景,其底层硬件的安全性直接决定了项目的成败。本文将从架构师视角,深度拆解如何在不触碰电梯主板、不破坏防爆平衡的前提下,构建高可用的机器人梯控 系统。重点探讨非侵入式信号逻辑、边缘状态机可靠性校验,并分享用于处理特种环境信号校验的底层 Python 代码。
导语: 安全是化工行业的生命线。在构建机器人梯控 架构时,我们不仅要解决跨层效率问题,更要从物理层规避电气火花风险,实现物理感知与逻辑调度的完美解耦。
基于边缘自治的化工防爆跨层架构解构

一、 架构基石:非侵入式旁路采集与物理隔离 在化工防爆电梯的改造中,严禁改动任何经过认证的电气回路。架构设计必须采用旁路采集模式。边缘控制器通过高阻抗的输入通道,物理并联在外围按键面板或加装独立传感器上。这种设计确保了即使外挂设备发生故障,电梯原本的防爆逻辑和安全回路依然能够独立、完整地运行,实现了物理层的严密容错。
二、 克服视觉致盲与精准平层防踏空 在全金属封闭且光线复杂的电梯轿厢内,巡检机器人依赖的视觉 SLAM 系统极易因特征点丢失而致盲。此外,化工电梯停靠时的微小落差对轮式机器人是巨大的挑战。 在边缘控制逻辑中,必须采用底层的双重物理校验:
- 采集加装的独立传感器传回的物理精准平层 到位信号。
- 采集门机系统的旁路干接点信号。 这种逻辑不依赖机器人自身视觉,确保了指令下发的高确定性。
三、 核心代码实战:化工特种场景信号滤波与状态机 以下 Python 代码模拟了边缘控制器如何通过软件滤波过滤化工电磁杂波,并响应消防中断:
Python
import time
import logging
logging.basicConfig(level=logging.INFO, format='%(asctime)s - [CHEMICAL_EDGE] - %(message)s')
class ChemicalSafetyController:
def __init__(self):
self.state = "IDLE"
self.filter_window = 0.08 # 80毫秒抗干扰采样窗
self.signal_stable_time = 0
def get_non_invasive_signals(self):
"""模拟读取外围独立传感器的物理电平(不采集主板)"""
# 返回值:precise_leveling(精准平层), fire_alarm(消防联动)
return {"precise_leveling": 1, "fire_alarm": 0}
def run_security_logic(self, robot_id):
signals = self.get_non_invasive_signals()
# 消防信号具有高度中断优先级
if signals["fire_alarm"] == 1:
logging.critical(f"FIRE DETECTED! Evacuating robot {robot_id}.")
self.state = "EMERGENCY"
return
# 针对精准平层的双重物理校验
if signals["precise_leveling"] == 1:
if self.signal_stable_time == 0:
self.signal_stable_time = time.time()
elif (time.time() - self.signal_stable_time) > self.filter_window:
if self.state != "READY_FOR_ENTRY":
logging.info(f"Signal confirmed. Floor alignment verified. Robot {robot_id} enter.")
self.state = "READY_FOR_ENTRY"
else:
self.signal_stable_time = 0
if self.state == "READY_FOR_ENTRY":
logging.warning("Signal flutter detected. Revoking access.")
self.state = "IDLE"
# 模拟高频巡检中的逻辑轮询
if __name__ == "__main__":
controller = ChemicalSafetyController()
for _ in range(5):
controller.run_security_logic(robot_id="EX_DOG_007")
time.sleep(0.05)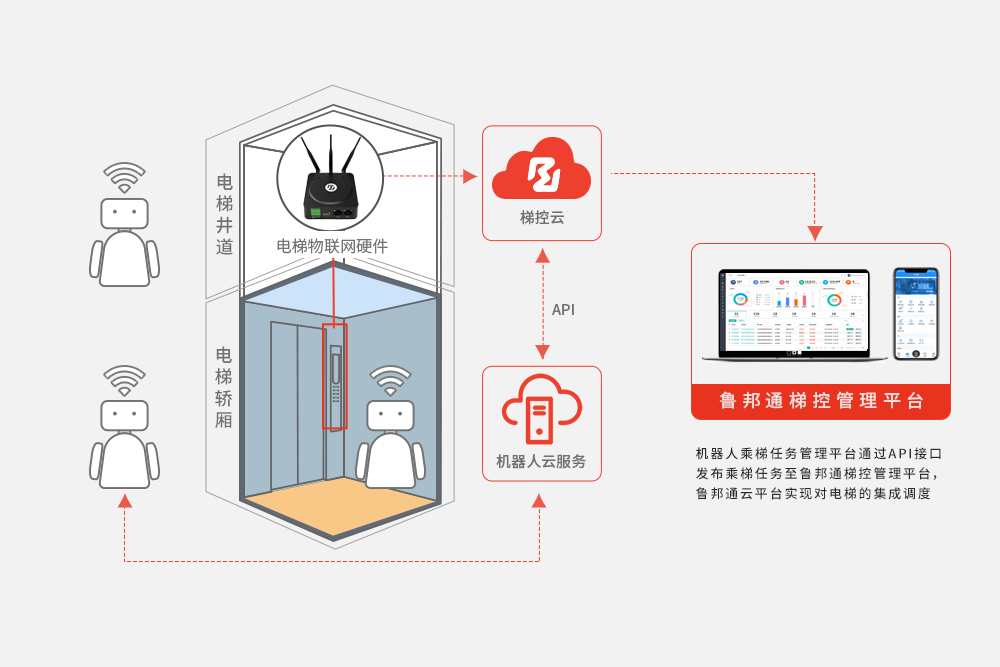
常见问题解答 (FAQ)
问题 1、为什么不能通过电梯主板协议获取状态?
回答 1、化工电梯的协议通常是封闭且经过安全认证的。任何协议破解都会使防爆证书失效。采用非侵入式外围采集是保障合规性的唯一路径。
问题 2、独立传感器如何在高腐蚀环境下长效工作?
回答 2、硬件需采用具备 IP67 及以上防护等级的工业级传感器,并配合防腐蚀涂层,以抵御化工酸碱气体的侵蚀。
问题 3、如何确保这套系统不会产生引燃火花?
回答 3、设备在接口端采用光电隔离技术,严格限制回路电流。这种本质安全型的设计从物理原理上规避了引燃风险。
结论: 化工园区的垂直调度需要对物理规律的尊重。通过非侵入式的机器人梯控 架构,我们能够在保障防爆完整性的前提下,为特种巡检筑起高可用的数字通道。