单一线程的启动已经在前两个章节介绍过了,下面我为大家分享如何进行多线程的创建!
我所应用的场景:so来处理硬件发送的数据,因为一些不确定操作缘故会导致操作模型时带动多个点被触发,此时需要使用多个线程对这个触发点做判断,在500ms内操作未发生变化时,表示该操作触发有效,在500ms内触发状态变化,则忽略此操作。
实现难点:
1:如何选择多线程 or 线程池?
2:使用纯C++环境如何自己实现线程池启动多线程?
3:当连接多个模型并同时出发一个操作点时,如何保证每个线程唯一性?
4:如何立即停止正在运行的多线程?
带着这些问题,我来为大家详细介绍我在so中使用的多线程机制!
确定线程启动方案
线程池和多线程不是同一个层次的概念,很多对线程不清楚的同学会混淆这两者。
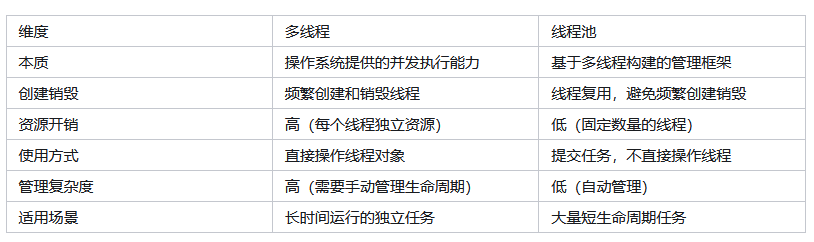
针对我应用的场景,属于大量短生命周期任务,并且处理的抖动硬件操作不是很多,可以采用线程池的方式。
我的这种方式仅作为Demo使用,当写的so进行一拖多时,会有问题,作为学习参考资料,还是非常不错的。
纯C++方式实现
业务逻辑:接收到硬件某条消息后,开启500ms的定时线程,如果在500ms内被再次触发,表明操作无效,达到500ms后,表示操作有效。
根据这个业务逻辑,使用C++的线程池方式来实现吧!
单个任务触发逻辑
所谓的多线程池操作,说白了就是把多个相同的线程放到一个地方进行管理,那么首要任务就是要先实现一个线程的完整流程。
请看完整代码:
cpp
class ThreadTask
{
public:
//定义回调函数,当线程结束后被回调(int:参数类型,int:线程运行的毫秒值)
using CallbackThreadTaskFinished = std::function<void(std::string, int, int)>;
ThreadTask()
{
m_bStopThread = false;
}
//设置线程超时时间
void setThreadTimeout(std::string sModeId, int nThreadType, int nTime, bool bBreakSendMsg = false)
{
m_sModeId = sModeId;
m_nThreadType = nThreadType;
m_nTimeout = nTime;
m_bBreakSendMsg = bBreakSendMsg;
}
//设置:回调函数
void setCallback(CallbackThreadTaskFinished callback)
{
m_callback = callback;
}
//执行任务
void run() {
int sleepCount = 0; // 记录实际休眠次数(每次100ms)
bool bTimeout = false; //超时了
while (!m_bStopThread) {
std::this_thread::sleep_for(std::chrono::milliseconds(100)); // 先休眠再判断
sleepCount++; // 累计休眠次数
// 检查线程是否自然结束,当m_nTimeout> 0时进行判断,当 < 0 时,需要外界停止
if (m_nTimeout > 0 && sleepCount * 100 >= m_nTimeout){
bTimeout = true;
break; //线程完毕,退出线程
}
}
//线程结束时执行回调函数
if (m_bBreakSendMsg && m_callback)
{
m_callback(m_sModeId, m_nThreadType, sleepCount);
}
else if (m_callback && bTimeout)
{
//线程自然结束后发送回调
m_callback(m_sModeId, m_nThreadType, sleepCount);
}
}
//停止标识
void StopThread() {
m_bStopThread = true;
}
//获取:当前任务标识
int getTypeId() {
return m_nThreadType;
}
private:
std::string m_sModeId; //模型类型
int m_nTimeout; //超时时间
int m_nThreadType; //记录线程类型,用于回调数据
bool m_bBreakSendMsg; //打断线程是否发送消息,默认不发送
std::atomic<bool> m_bStopThread; //强制停止标志
CallbackThreadTaskFinished m_callback; //回调函数
};注释写的非常清楚,我这里就不再详细讲述了。
今天就为大家主要介绍如何单个使用一个线程任务的逻辑,如果有问题可以评论留言哟,下一章节为大家介绍如何在线程池中调用这个Task~
我是糯诺诺米团,一名C++程序媛~