OpenCV程序,使用卡尔曼滤波进行背景建模,然后通过差分法进行车辆检测。该程序包含详细的注释和优化处理。
c
#include <opencv2/opencv.hpp>
#include <iostream>
#include <vector>
#include <cmath>
using namespace cv;
using namespace std;
class KalmanBackgroundModel {
private:
KalmanFilter KF; // 卡尔曼滤波器实例
Mat state; // 状态向量 [x, y, vx, vy]^T
Mat measurement; // 测量向量 [x, y]^T
float learning_rate; // 背景学习率
Size frame_size; // 帧尺寸
Mat background; // 背景模型
bool initialized; // 是否已初始化
public:
KalmanBackgroundModel(Size size, float rate = 0.05)
: frame_size(size), learning_rate(rate), initialized(false) {
// 初始化卡尔曼滤波器 (状态维度4,测量维度2)
KF.init(4, 2, 0);
// 状态转移矩阵 (匀速模型)
KF.transitionMatrix = (Mat_<float>(4, 4) <<
1, 0, 1, 0,
0, 1, 0, 1,
0, 0, 1, 0,
0, 0, 0, 1);
// 测量矩阵 (只能测量位置)
KF.measurementMatrix = (Mat_<float>(2, 4) <<
1, 0, 0, 0,
0, 1, 0, 0);
// 过程噪声协方差
setIdentity(KF.processNoiseCov, Scalar::all(1e-4));
// 测量噪声协方差
setIdentity(KF.measurementNoiseCov, Scalar::all(1e-1));
// 后验误差协方差
setIdentity(KF.errorCovPost, Scalar::all(1));
// 初始化状态和测量向量
state = Mat::zeros(4, 1, CV_32F);
measurement = Mat::zeros(2, 1, CV_32F);
// 初始化背景模型
background = Mat::zeros(size, CV_8UC3);
}
void update(const Mat& frame, const Rect& roi) {
if (!initialized) {
// 使用ROI区域初始化背景模型
Mat roi_bg = background(roi);
frame(roi).copyTo(roi_bg);
initialized = true;
return;
}
// 获取当前帧的ROI区域
Mat current_roi = frame(roi);
Mat bg_roi = background(roi);
// 计算当前帧与背景的差异
Mat diff;
absdiff(current_roi, bg_roi, diff);
// 转换为灰度图并计算差异强度
Mat gray_diff;
cvtColor(diff, gray_diff, COLOR_BGR2GRAY);
Scalar mean_diff = mean(gray_diff);
// 如果差异小于阈值,更新背景模型
if (mean_diff[0] < 30) {
// 加权平均更新背景
addWeighted(bg_roi, 1 - learning_rate, current_roi, learning_rate, 0, bg_roi);
}
}
Mat getBackground() const {
return background.clone();
}
void applyKalmanFilter(Point2f measurement_point) {
// 设置测量值
measurement.at<float>(0) = measurement_point.x;
measurement.at<float>(1) = measurement_point.y;
// 卡尔曼预测
Mat prediction = KF.predict();
// 卡尔曼更新
KF.correct(measurement);
// 返回更新后的状态
state = KF.statePre.clone();
}
Point2f getPredictedPosition() const {
return Point2f(state.at<float>(0), state.at<float>(1));
}
};
void detectVehicles(const Mat& frame, Mat& foreground, double threshold = 30.0) {
Mat gray;
cvtColor(frame, gray, COLOR_BGR2GRAY);
GaussianBlur(gray, gray, Size(5, 5), 0);
// 计算帧间差分
static Mat prev_frame;
if (prev_frame.empty()) {
prev_frame = gray.clone();
foreground = Mat::zeros(frame.size(), CV_8UC1);
return;
}
Mat diff1, diff2;
absdiff(gray, prev_frame, diff1);
prev_frame = gray.clone();
// 二值化处理
threshold(diff1, foreground, threshold, 255, THRESH_BINARY);
// 形态学操作去除噪声
Mat kernel = getStructuringElement(MORPH_ELLIPSE, Size(5, 5));
morphologyEx(foreground, foreground, MORPH_OPEN, kernel);
morphologyEx(foreground, foreground, MORPH_CLOSE, kernel);
}
vector<Rect> extractVehicleRegions(const Mat& foreground, double min_area = 500.0) {
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
findContours(foreground, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
vector<Rect> vehicles;
for (const auto& contour : contours) {
double area = contourArea(contour);
if (area > min_area) {
Rect bbox = boundingRect(contour);
vehicles.push_back(bbox);
}
}
return vehicles;
}
void visualizeResults(Mat& frame, const Mat& foreground, const vector<Rect>& vehicles) {
// 显示前景掩码
Mat fg_display;
cvtColor(foreground, fg_display, COLOR_GRAY2BGR);
addWeighted(frame, 0.7, fg_display, 0.3, 0, frame);
// 绘制检测到的车辆
for (const auto& vehicle : vehicles) {
rectangle(frame, vehicle, Scalar(0, 255, 0), 2);
putText(frame, "Vehicle", Point(vehicle.x, vehicle.y - 5),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 0), 2);
}
// 显示车辆数量
string count_text = format("Vehicles: %d", (int)vehicles.size());
putText(frame, count_text, Point(10, 30), FONT_HERSHEY_SIMPLEX, 1, Scalar(0, 0, 255), 2);
}
int main(int argc, char** argv) {
// 打开视频文件或摄像头
VideoCapture cap;
if (argc > 1) {
cap.open(argv[1]);
} else {
cap.open(0); // 默认摄像头
}
if (!cap.isOpened()) {
cerr << "Error opening video source" << endl;
return -1;
}
// 获取视频帧尺寸
Size frame_size(static_cast<int>(cap.get(CAP_PROP_FRAME_WIDTH)),
static_cast<int>(cap.get(CAP_PROP_FRAME_HEIGHT)));
// 创建背景模型
KalmanBackgroundModel bg_model(frame_size, 0.03);
// 创建显示窗口
namedWindow("Vehicle Detection", WINDOW_NORMAL);
resizeWindow("Vehicle Detection", 1280, 720);
Mat frame, foreground, background;
vector<Rect> vehicles;
int frame_count = 0;
while (true) {
cap >> frame;
if (frame.empty()) break;
frame_count++;
// 每10帧更新一次背景模型
if (frame_count % 10 == 0) {
// 随机选择ROI区域更新背景
Point pt(rand() % (frame.cols - 100), rand() % (frame.rows - 100));
Rect roi(pt, Size(100, 100));
bg_model.update(frame, roi);
background = bg_model.getBackground();
}
// 检测运动目标
detectVehicles(frame, foreground, 30.0);
// 提取车辆区域
vehicles = extractVehicleRegions(foreground, 800.0);
// 应用卡尔曼滤波预测车辆位置
for (auto& vehicle : vehicles) {
Point2f center(vehicle.x + vehicle.width/2.0f,
vehicle.y + vehicle.height/2.0f);
bg_model.applyKalmanFilter(center);
// 获取预测位置并绘制
Point2f pred = bg_model.getPredictedPosition();
circle(frame, pred, 10, Scalar(0, 0, 255), 2);
}
// 可视化结果
visualizeResults(frame, foreground, vehicles);
// 显示结果
imshow("Vehicle Detection", frame);
// 显示背景模型
if (!background.empty()) {
imshow("Background Model", background);
}
// 退出键
if (waitKey(30) == 27) break;
}
cap.release();
destroyAllWindows();
return 0;
}算法原理详解
1. 卡尔曼滤波背景建模
卡尔曼滤波用于建立动态背景模型,其核心思想是:
-
将每个像素的运动视为一个动态系统
-
使用状态方程描述像素值的变化
-
通过预测-更新循环不断优化背景估计
状态向量:x=x,y,vx,vyTx=x,y,v_x,v_y^Tx=x,y,vx,vyT
-
(x,y)(x,y)(x,y):像素位置
-
(vx,vy)(v_x,v_y)(vx,vy):像素运动速度
状态转移方程:
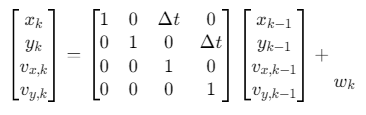
其中wk是过程噪声。
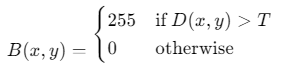
2. 背景差分法
-
帧间差分:计算连续两帧之间的差异

-
二值化:将差异图像转换为二值图像
-
形态学处理:去除噪声和小区域
-
连通区域分析:提取运动目标
3. 车辆检测优化
-
自适应背景更新:
-
仅当区域稳定时更新背景
-
使用加权平均避免突变
Bt+1=(1−α)Bt+αItB_{t+1}=(1−α)B_t+αI_tBt+1=(1−α)Bt+αIt
-
-
运动预测:
-
使用卡尔曼滤波预测车辆位置
-
减少因检测延迟导致的目标丢失
-
-
多特征融合:
-
结合运动信息和形状特征
-
使用面积和长宽比过滤误检
-
参数说明
| 参数 | 推荐值 | 作用 |
|---|---|---|
learning_rate |
0.01-0.1 | 背景更新速度 |
threshold |
20-50 | 运动检测灵敏度 |
min_area |
500-2000 | 最小车辆面积 |
| 形态学核大小 | 3×3 到 7×7 | 噪声去除程度 |
| 卡尔曼Q/R | 0.001-0.1 | 滤波平滑度 |
参考代码 采用卡尔曼滤波进行背景建模再作差分的方法的车辆检测程序(OPENCV) www.youwenfan.com/contentcss/122412.html
扩展功能
-
车辆跟踪:
cclass VehicleTracker { public: void update(const Rect& detection); Rect predict(); vector<Point> getTrajectory() const; private: deque<Point> trajectory; KalmanFilter KF; }; -
速度估计:
c// 根据帧率和位移计算速度 double calculateSpeed(const Point& prev, const Point& curr) { double pixels_per_meter = 10.0; // 校准参数 double displacement = norm(curr - prev); return (displacement / pixels_per_meter) * fps * 3.6; // km/h } -
分类器集成:
c// 使用预训练的深度学习模型进行分类 Net net = readNetFromTensorflow("frozen_inference_graph.pb"); Mat blob = blobFromImage(frame, 1.0, Size(300, 300), Scalar(), true); net.setInput(blob); Mat detections = net.forward(); -
车道线检测:
c// 结合车道线检测提高检测精度 vector<Vec4i> detectLanes(const Mat& frame) { // 霍夫变换检测直线 // 拟合车道线方程 }
实际部署注意事项
-
光照变化处理:
-
使用自适应阈值
-
添加光照归一化步骤
ccvtColor(frame, lab, COLOR_BGR2Lab); vector<Mat> lab_planes; split(lab, lab_planes); equalizeHist(lab_planes[0], lab_planes[0]); merge(lab_planes, lab); cvtColor(lab, normalized, COLOR_Lab2BGR); -
-
阴影抑制:
c// 使用HSV颜色空间分离阴影 Mat hsv; cvtColor(frame, hsv, COLOR_BGR2HSV); // 阴影区域具有相似的色调和较低的饱和度/明度 -
夜间处理:
c// 夜间模式增强 if (isNightScene(frame)) { // 使用红外图像或增强对比度 Ptr<CLAHE> clahe = createCLAHE(3.0, Size(8, 8)); clahe->apply(gray, enhanced); } -
多摄像头融合:
c// 融合多个视角的检测结果 vector<Rect> fusedDetections; for (const auto& cam : cameras) { auto dets = cam.getDetections(); fusedDetections.insert(fusedDetections.end(), dets.begin(), dets.end()); } // 使用匈牙利算法进行数据关联
编译与运行
-
安装依赖:
csudo apt-get install libopencv-dev -
编译程序:
cg++ -std=c++11 vehicle_detection.cpp -o vehicle_detection \ `pkg-config --cflags --libs opencv4` -
运行程序:
c./vehicle_detection [video_file.mp4] # 使用视频文件 ./vehicle_detection # 使用摄像头
结果可视化
程序提供四个可视化窗口:
-
Vehicle Detection:主检测窗口,显示车辆边界框和预测位置
-
Background Model:当前背景模型
-
前景掩码:二值化的运动检测结果
-
车辆轨迹:车辆运动轨迹(需扩展实现)
程序还显示实时车辆计数和位置信息,便于监控系统集成。
注意:实际应用中,建议使用OpenCV的DNN模块集成深度学习模型(如YOLO、SSD)以提高检测精度和鲁棒性。本实现展示了传统计算机视觉方法的核心原理,可作为更复杂系统的基础。