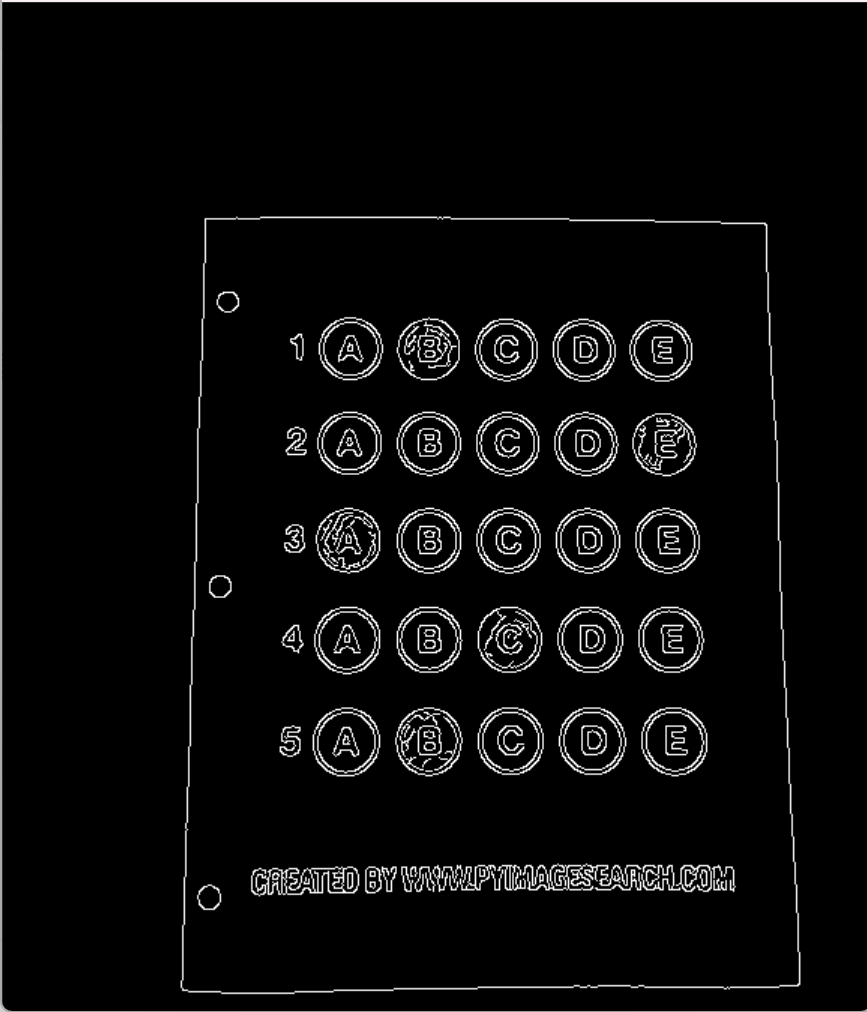
1,预处理
灰度图,高斯去噪,边缘检测
gray=cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
blurred=cv2.GaussianBlur(gray,(5,5),0)
# cv_show(blurred,"blurred")
edged=cv2.Canny(blurred,75,200)
# cv_show(edged,"canny")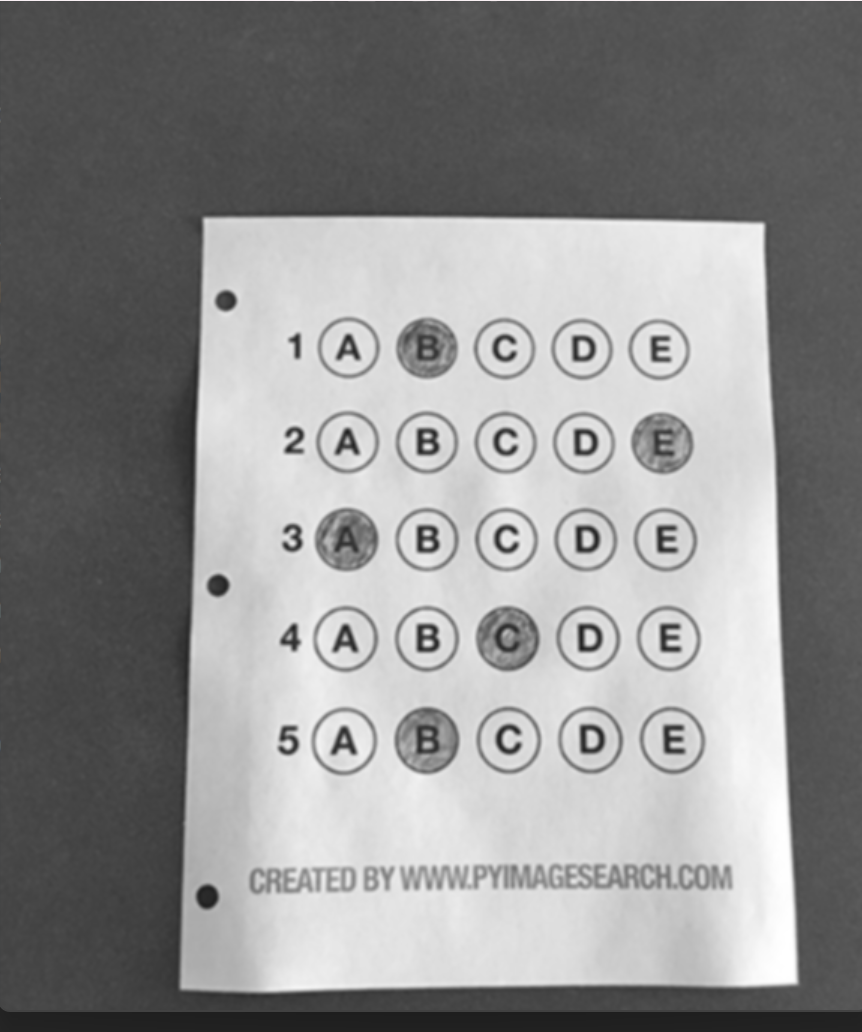
2,找到答题卡
进行轮廓检测,近似轮廓
#轮廓检测
cnts=cv2.findContours(edged.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[0]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),2)
cv_show(contours_img,"contours")
#近似轮廓
docCnt=None
if len(cnts)>0:
cnts=sorted(cnts,key=cv2.contourArea,reverse=True)
for c in cnts:
per=cv2.arcLength(c,True)
approx=cv2.approxPolyDP(c,0.02*per,True)
#准备透视变换
if len(approx)==4:
docCnt=approx
break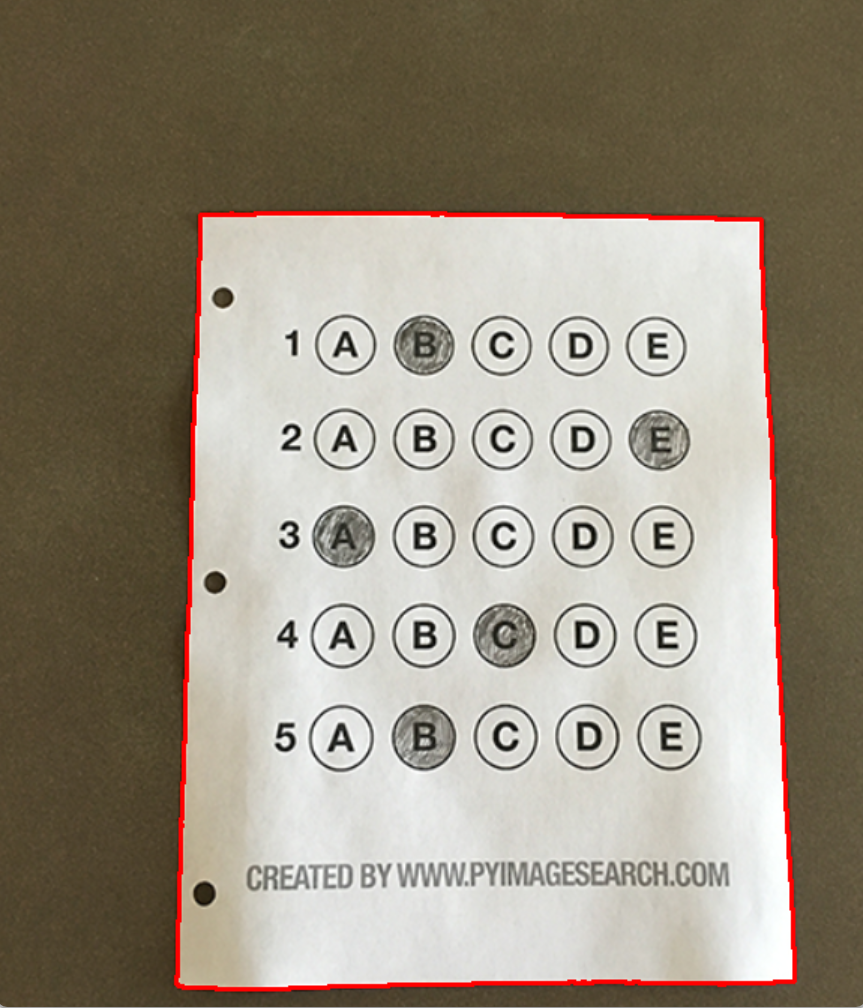
3,矫正答题卡
进行透视变换,获取近似四边形的四个顶点,对应好四个顶点的位置,将四边形的中最长的长宽作为矩形的长宽
def oreder_points(pts):
rect=np.zeros((4,2),dtype="float32")
s=pts.sum(axis=1)
rect[0]=pts[np.argmin(s)]
rect[2]=pts[np.argmax(s)]
diff=np.diff(pts,axis=1)
rect[1]=pts[np.argmin(diff)]
rect[3]=pts[np.argmax(diff)]
return rect
def four_point_transform(image,pts):
rect=oreder_points(pts)
(tl,tr,br,bl)=rect
widthA=np.sqrt(((tl[0]-tr[0])**2)+((tl[1]-tr[1])**2))
widthB=np.sqrt(((bl[0]-br[0])**2)+((bl[1]-br[1])**2))
maxwidth=max(int(widthB),int(widthA))
heightA=np.sqrt(((bl[0]-tl[0])**2)+((bl[1]-tl[1])**2))
heightB=np.sqrt(((br[0]-tr[0])**2)+((br[1]-tr[1])**2))
maxheight=max(int(heightB),int(heightA))
dst=np.array([
[0,0],
[maxwidth-1,0],
[maxwidth-1,maxheight-1],
[0,maxheight-1]
],dtype="float32")
#计算变换矩阵
M=cv2.getPerspectiveTransform(rect,dst)
warped=cv2.warpPerspective(image,M,(maxwidth,maxheight))
return warped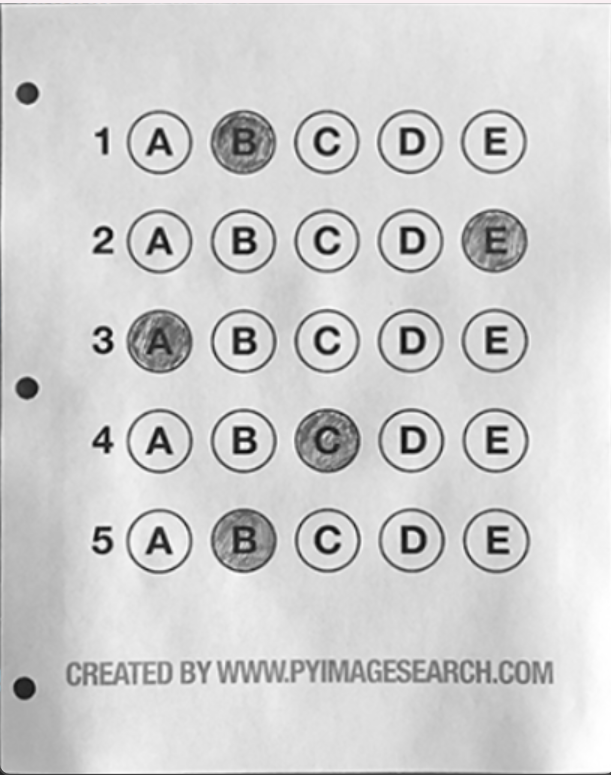
4,找到涂卡区域
阈值处理,查找轮廓,筛选轮廓
#阈值处理
thresh=cv2.threshold(warped,0,255,cv2.THRESH_BINARY_INV|cv2.THRESH_OTSU)[1]
# cv_show(thresh,"thresh")
thresh_contours=thresh.copy()
cnts=cv2.findContours(thresh.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[0]
# cv2.drawContours(warped,cnts,-1,(0,0,0),2)
# cv_show(warped,"thresh_contours")
questionCnts=[]
for c in cnts:
(x,y,w,h)=cv2.boundingRect(c)
ar=w/float(h)
if w>=20 and h>=20 and ar>=0.9 and ar<=1.1:
questionCnts.append(c)
cv2.drawContours(warped,questionCnts,-1,(0,0,0),2)
cv_show(warped,"questionContours")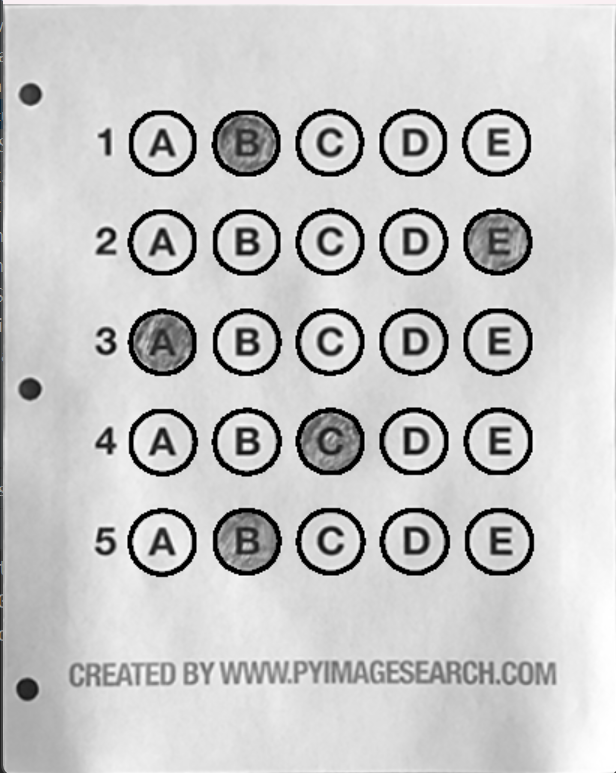
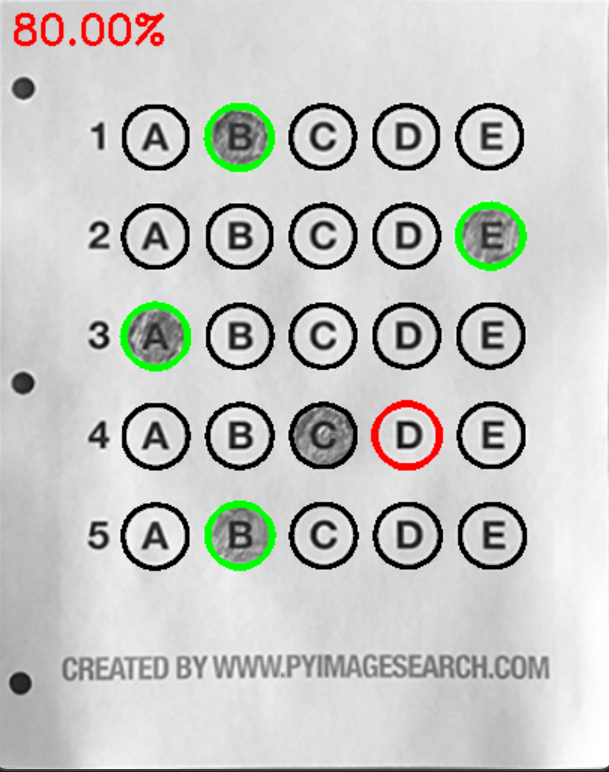
5,判断对错
对轮廓进行上下排序,确保每题的选项,对每题的轮廓进行左右排序,确保选项的位置正确,将全黑掩码与每个选项轮廓进行填充以此获得每个选项的掩码,将此掩码与选项轮廓进行与操作,然后计算白像素数量,白像素最多的是考生的作答选项,最后对比正确答案
注意:需要将投射变换后的图像转为彩色图才能显示出绘制的颜色
color_warped=cv2.cvtColor(warped,cv2.COLOR_GRAY2BGR)
questionCnts=sort_contours(questionCnts,method="top-to-bottom")[0]
correct=0
for (q,i) in enumerate(np.arange(0,len(questionCnts),5)):
cnts=sort_contours(questionCnts[i:i+5])[0]
bubbled=None
for (j,c) in enumerate(cnts):
mask=np.zeros(thresh.shape,dtype="uint8")
cv2.drawContours(mask,[c],-1,255,-1)#-1表示填充
cv_show(mask,"mask")
#此时的mask是每一个选项的白圈
mask=cv2.bitwise_and(thresh,thresh,mask=mask)
cv_show(mask,"mask")
total=cv2.countNonZero(mask)
if bubbled is None or total>bubbled[0]:
bubbled=(total,j)
color=(0,0,255)
k=ANSWER_KEY[q]
if k==bubbled[1]:
color=[0,255,0]
correct+=1
cv2.drawContours(color_warped,[cnts[k]],-1,color,3)