本学习内容来自机器人工匠阿杰,本人仅作学习笔记记录,方便后续查看学习。详细内容可自行搜索去看机器人工匠阿杰up主,讲的很好。
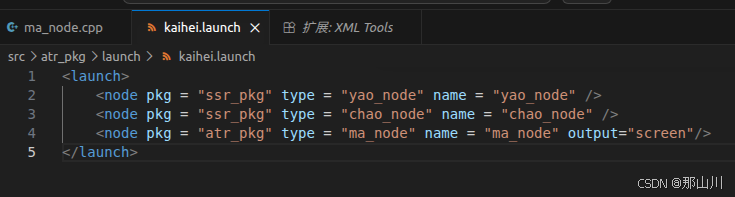
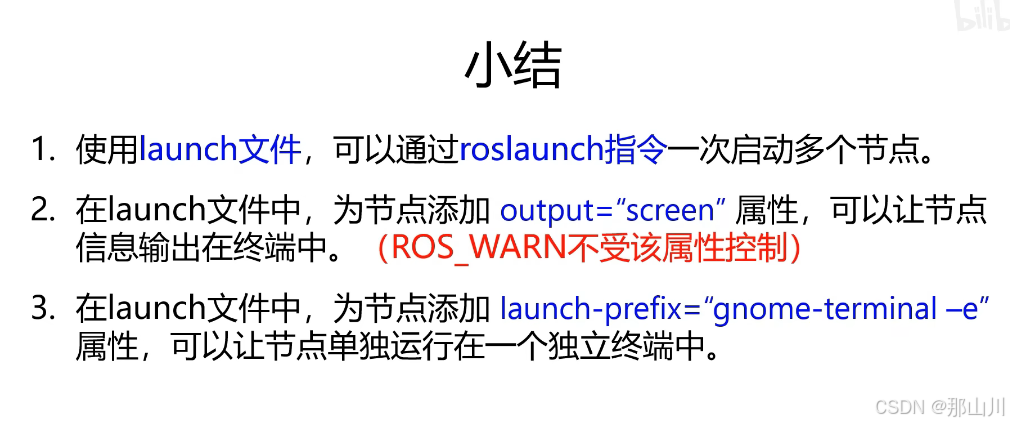
launch文件启动多个节点
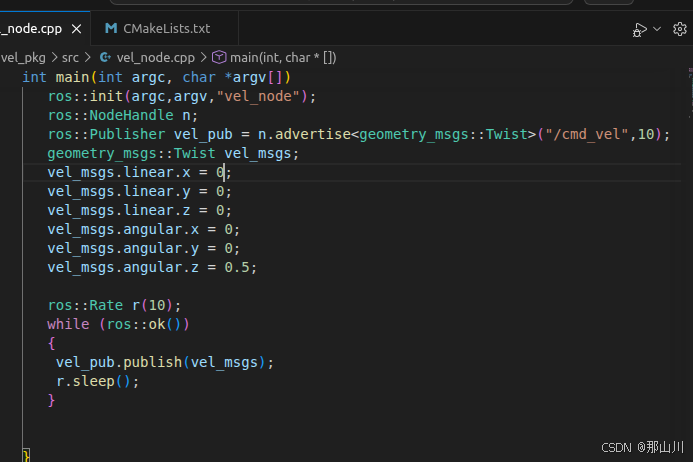
单独调试某个节点


发发送cmd_vel话题让机器人原地沿z轴正向旋转
同时订阅发布进行避障模拟
cpp
#include<ros/ros.h>
#include<sensor_msgs/LaserScan.h>
#include<geometry_msgs/Twist.h>
ros::Publisher vel_pub;
int nCount = 0;
void LidarCallback(const sensor_msgs::LaserScan msg){
float fMidDist = msg.ranges[180];
ROS_INFO("前方测距 range[180] = %.2f 米", fMidDist);
geometry_msgs::Twist vel_cmd;
if(nCount>0){
nCount--;
return;
}
if (fMidDist<1.5)
{
vel_cmd.angular.z=0.3;
nCount = 50;
}else{
vel_cmd.linear.x=0.05;
}
vel_pub.publish(vel_cmd);
}
int main(int argc, char *argv[])
{
ros::init(argc, argv, "lidar_node");
ros::NodeHandle n;
ros::Subscriber lidar_sub = n.subscribe("/scan", 10, &LidarCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("cmd_vel",10);
ros::spin();
return 0;
}imu航向锁定
cpp
#include<ros/ros.h>
#include<sensor_msgs/Imu.h>
#include<tf/tf.h>
#include<geometry_msgs/Twist.h>
ros::Publisher vel_pub;
void IMUCallback(const sensor_msgs::Imu msg){
// 检测消息包中四元数数据是否存在
if(msg.orientation_covariance[0]<0)
return;
// 四元数转换 转换后的四元术对象quaternion
tf::Quaternion quaternion(
msg.orientation.x,
msg.orientation.y,
msg.orientation.z,
msg.orientation.w
);
// 欧拉角
double roll,pitch,yaw;
tf::Matrix3x3(quaternion).getRPY(roll,pitch,yaw);
// 弧度转角度
roll = roll*180/M_PI;
pitch = pitch*180/M_PI;
yaw = yaw*180/M_PI;
ROS_INFO("滚转= %.0f 仰俯= %0.f 朝向= %0.f",roll,pitch,yaw);
// 速度消息包
geometry_msgs::Twist vel_cmd;
// 目标朝向角
double target_yaw = 90;
// 当前机器人与目标朝向角差
double diff_angle = target_yaw-yaw;
// 计算速度
vel_cmd.angular.z = diff_angle*0.01;
vel_cmd.linear.x = 0.1;
vel_pub.publish(vel_cmd);
}
int main(int argc, char *argv[])
{
setlocale(LC_ALL,"");
ros::init(argc,argv,"imu_node");
ros::NodeHandle n;
ros::Subscriber imu_sub = n.subscribe("/imu/data",10,IMUCallback);
vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel",10);
ros::spin();
}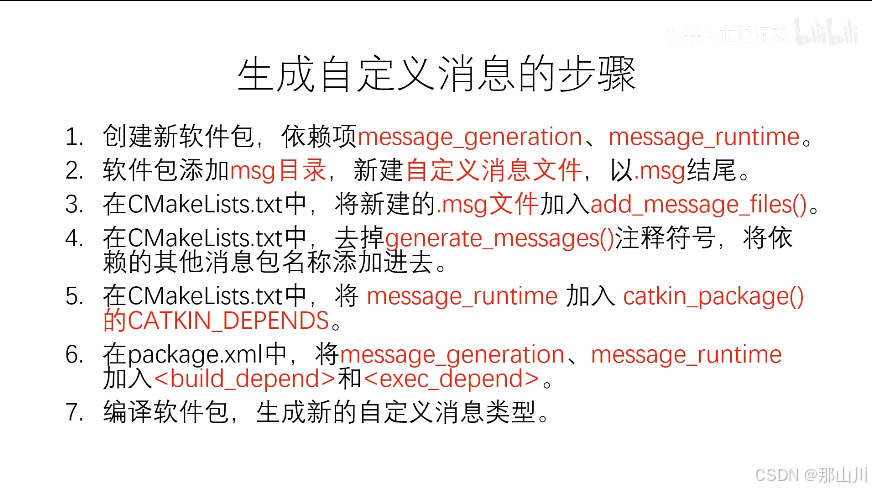
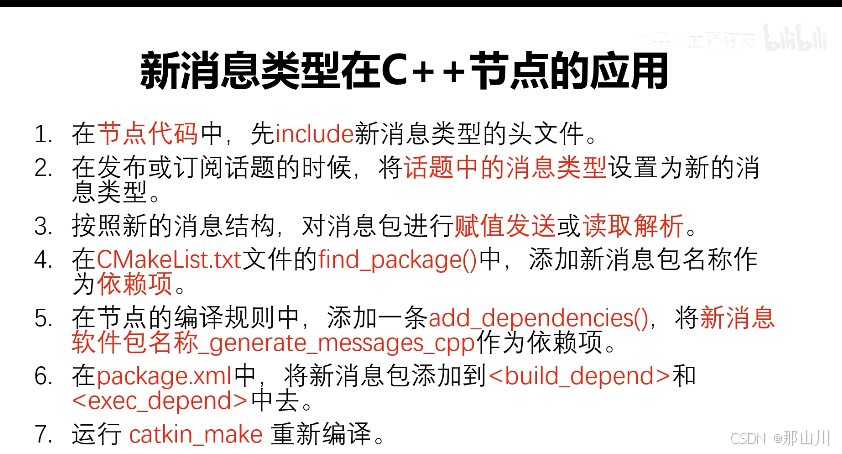
bash
catkin_create_pkg qq_msgs roscpp rospy std_msgs message_generation message_runtime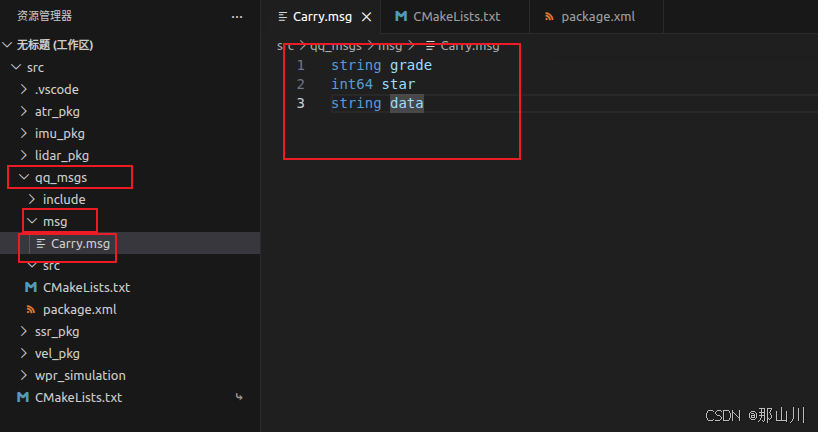
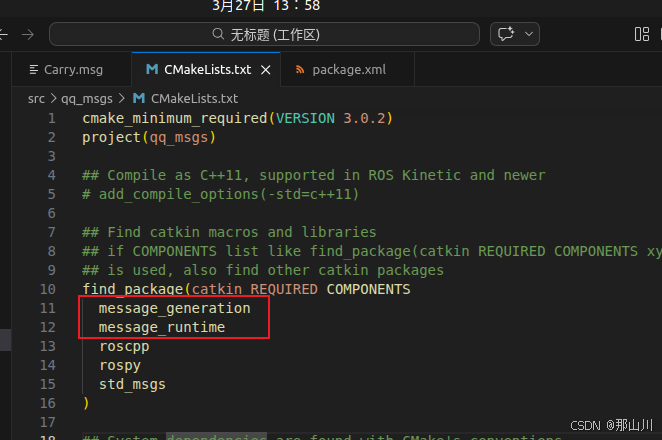
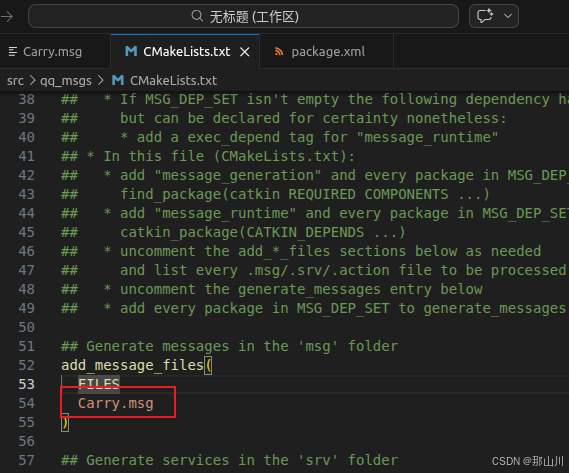
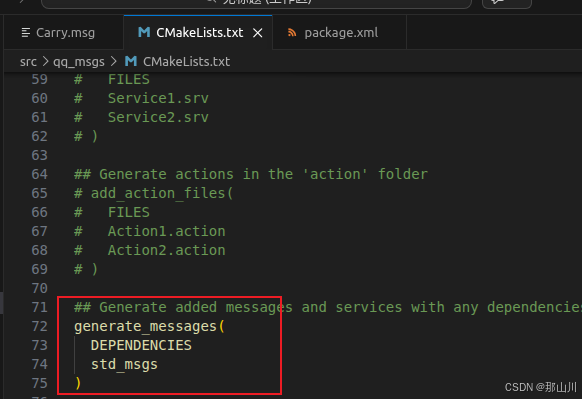
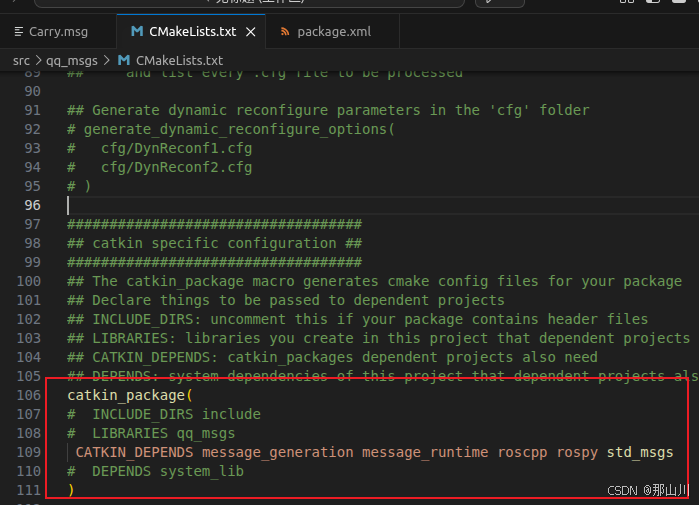
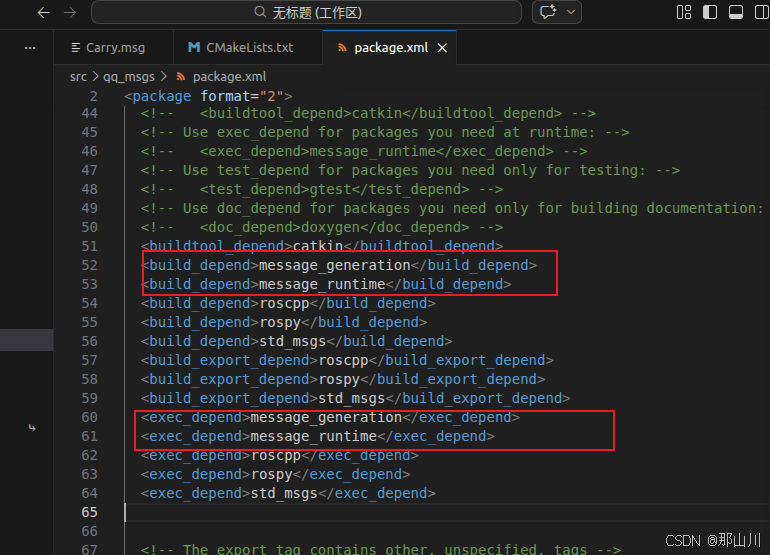
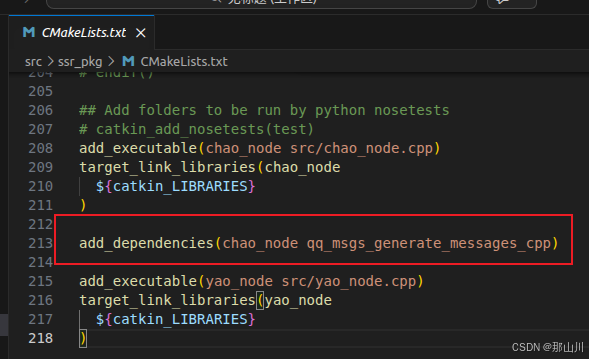
修改完毕直接catkin_ws 进行 catkin_make 编译
bash
sxd@sxd:~/catkin_ws$ rosmsg show qq_msgs/Carry
string grade
int64 star
string data
sxd@sxd:~/catkin_ws$