一、背景建模概述
在计算机视觉领域,背景建模是从视频序列中提取静态背景、分离动态前景的核心技术,广泛应用于运动检测、目标跟踪、行为分析等场景。
简单来说,背景就是视频中相对稳定的部分(如墙壁、地面),前景则是运动的目标(如行人、车辆)。背景建模的目标就是构建一个可靠的背景模型,将两者精准分离。
二、三种主流背景建模方法
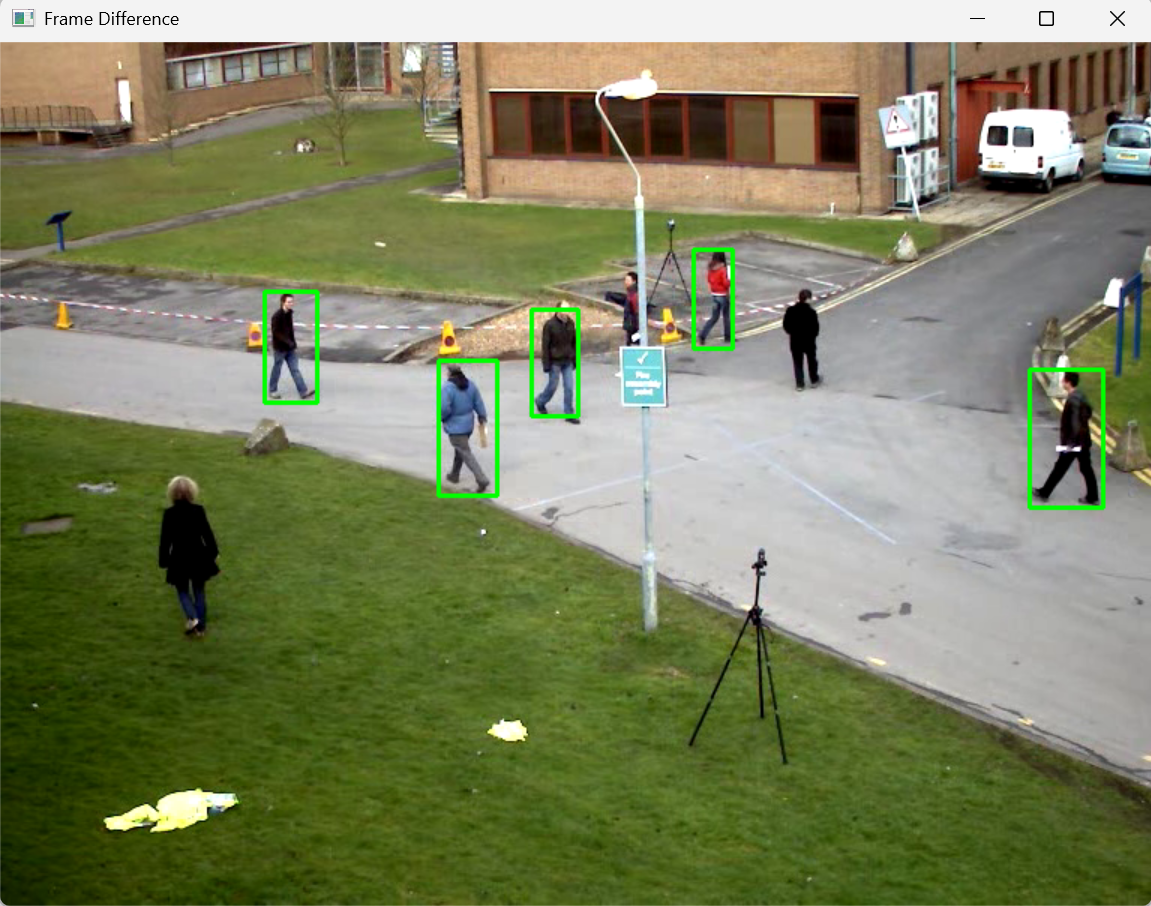
1. 帧差法(Frame Difference)
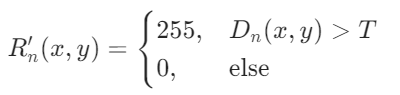
原理:对连续两帧图像做差分运算,计算像素灰度差的绝对值,超过阈值则判定为运动目标。公式如下:

优缺点:
- 实现简单、计算速度快
- 易受光照变化影响,会产生噪声和空洞(如目标内部出现黑色区域)
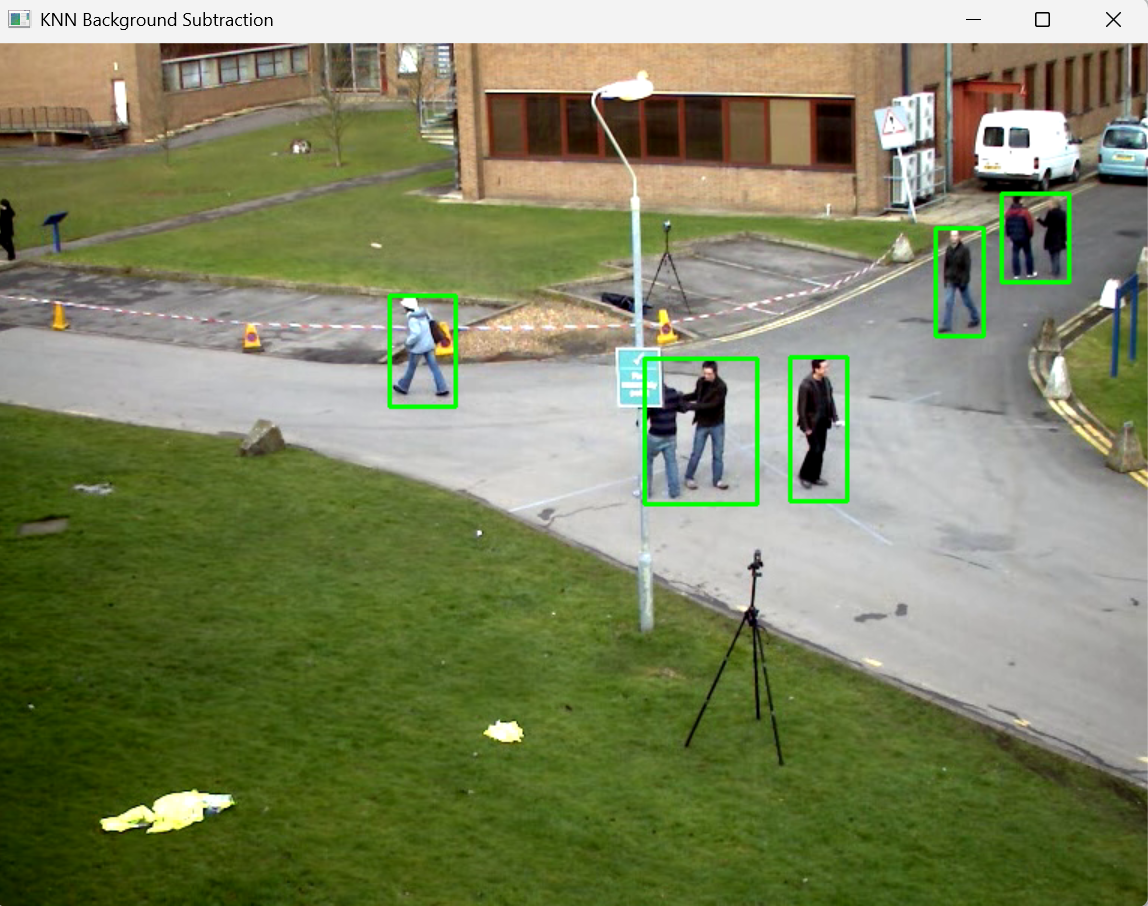
2. K 近邻背景建模(KNN)
原理:为每个像素维护一个历史样本集,新像素值与样本集中的 K 个样本做距离比对,若多数样本相似则判定为背景,否则为前景。
优缺点:
- 对光照变化和动态背景(如树叶晃动)有一定鲁棒性
- 计算量较大,内存占用较高
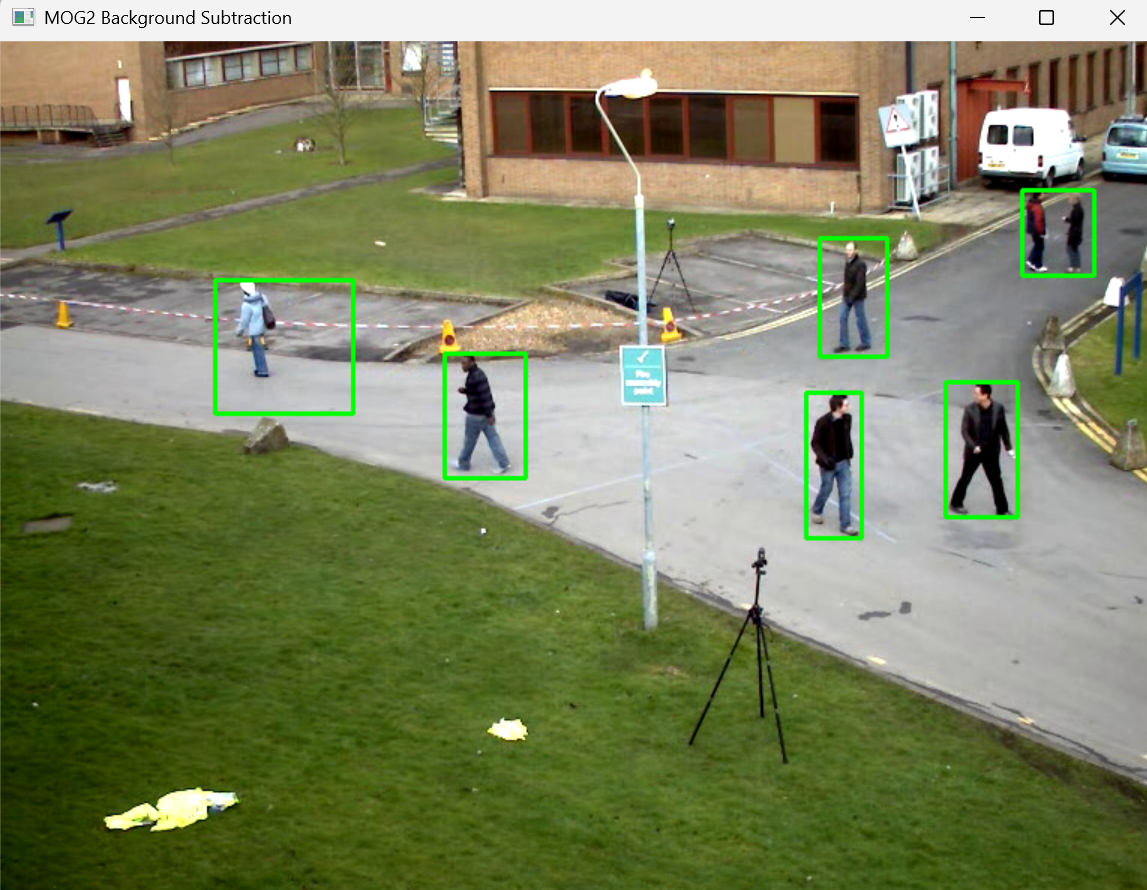
3. 高斯混合模型(MOG2)
原理:用多个高斯分布来建模每个像素的颜色分布,通过在线 EM 算法更新模型参数,能自适应学习背景变化。
优缺点:
- 鲁棒性强,能处理复杂背景和光照渐变
- 初始建模需要一定时间,参数调优较复杂
三、代码实现:
python
import cv2
import numpy as np
# 测试视频路径
video_path = 'test.avi'
# 初始化三种背景建模器
fgbg_mog2 = cv2.createBackgroundSubtractorMOG2(history=500, detectShadows=True)
fgbg_knn = cv2.createBackgroundSubtractorKNN(history=500, detectShadows=True)
# 卷积核,用于形态学操作去噪
kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, ksize=(3, 3))
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print("视频打开失败!")
exit()
while True:
ret, frame = cap.read()
if not ret:
break
# ---------------------- 1. 帧差法 ----------------------
if 'prev_frame' not in locals():
prev_frame = frame.copy()
continue
frame_diff = cv2.absdiff(frame, prev_frame)
_, thresh_diff = cv2.threshold(frame_diff, 30, 255, cv2.THRESH_BINARY)
thresh_diff = cv2.cvtColor(thresh_diff, cv2.COLOR_BGR2GRAY)
thresh_diff = cv2.morphologyEx(thresh_diff, cv2.MORPH_OPEN, kernel)
prev_frame = frame.copy()
# ---------------------- 2. KNN 方法 ----------------------
fgmask_knn = fgbg_knn.apply(frame)
fgmask_knn = cv2.morphologyEx(fgmask_knn, cv2.MORPH_OPEN, kernel)
# ---------------------- 3. MOG2 方法 ----------------------
fgmask_mog2 = fgbg_mog2.apply(frame)
fgmask_mog2 = cv2.morphologyEx(fgmask_mog2, cv2.MORPH_OPEN, kernel)
# ---------------------- 轮廓检测与可视化 ----------------------
def draw_contours(img, mask):
_, contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
perimeter = cv2.arcLength(c, closed=True)
if perimeter > 188:
x, y, w, h = cv2.boundingRect(c)
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
return img
frame_diff_rect = draw_contours(frame.copy(), thresh_diff)
frame_knn_rect = draw_contours(frame.copy(), fgmask_knn)
frame_mog2_rect = draw_contours(frame.copy(), fgmask_mog2)
# ---------------------- 显示结果 ----------------------
cv2.imshow('Original Frame', frame)
cv2.imshow('Frame Difference', frame_diff_rect)
cv2.imshow('KNN Background Subtraction', frame_knn_rect)
cv2.imshow('MOG2 Background Subtraction', frame_mog2_rect)
k = cv2.waitKey(30) & 0xff
if k == 27: # ESC 退出
break
cap.release()
cv2.destroyAllWindows()四、代码讲解
python
fgbg_mog2 = cv2.createBackgroundSubtractorMOG2(history=500, detectShadows=True)
fgbg_knn = cv2.createBackgroundSubtractorKNN(history=500, detectShadows=True)初始化两种高级背景建模器:
- MOG2:混合高斯模型,自适应背景、抗光照
- KNN :K 近邻模型,对动态背景(树叶、水波)更鲁棒
history=500表示用 500 帧学习背景,detectShadows=True开启阴影检测。
python
kernel = cv2.getStructuringElement(cv2.MORPH_CROSS, ksize=(3, 3))创建 3×3 十字形结构核,用于后续开运算去噪 ,消除小噪点让前景更干净。
python
cap = cv2.VideoCapture(video_path)
if not cap.isOpened():
print("视频打开失败!")
exit()打开视频文件,并判断是否成功打开;失败则提示并退出,避免程序崩溃。
python
while True:
ret, frame = cap.read()
if not ret:
break循环读取视频每一帧。
ret:是否成功读到帧frame:当前帧图像读到视频末尾自动退出循环。
python
# 帧差法
if 'prev_frame' not in locals():
prev_frame = frame.copy()
continue
frame_diff = cv2.absdiff(frame, prev_frame)
_, thresh_diff = cv2.threshold(frame_diff, 30, 255, cv2.THRESH_BINARY)
thresh_diff = cv2.cvtColor(thresh_diff, cv2.COLOR_BGR2GRAY)
thresh_diff = cv2.morphologyEx(thresh_diff, cv2.MORPH_OPEN, kernel)
prev_frame = frame.copy()实现帧差法(最简单的运动检测):
- 保存上一帧
- 计算当前帧与上一帧差值
- 二值化分离前景背景
- 转灰度图 + 开运算去噪
- 更新上一帧
python
# KNN
fgmask_knn = fgbg_knn.apply(frame)
fgmask_knn = cv2.morphologyEx(fgmask_knn, cv2.MORPH_OPEN, kernel)使用 KNN 背景建模得到前景掩码,再通过形态学开运算去除小白点噪点。
python
# MOG2
fgmask_mog2 = fgbg_mog2.apply(frame)
fgmask_mog2 = cv2.morphologyEx(fgmask_mog2, cv2.MORPH_OPEN, kernel)使用 MOG2 混合高斯模型得到前景掩码,同样做去噪处理。
python
def draw_contours(img, mask):
_, contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for c in contours:
perimeter = cv2.arcLength(c, closed=True)
if perimeter > 188:
x, y, w, h = cv2.boundingRect(c)
cv2.rectangle(img, (x, y), (x+w, y+h), (0, 255, 0), 2)
return img定义轮廓绘制函数:
- 寻找前景轮廓
- 根据轮廓周长过滤小噪声(只保留大于 188 的目标)
- 绘制绿色外接矩形,标记运动目标
python
frame_diff_rect = draw_contours(frame.copy(), thresh_diff)
frame_knn_rect = draw_contours(frame.copy(), fgmask_knn)
frame_mog2_rect = draw_contours(frame.copy(), fgmask_mog2)分别对帧差法、KNN、MOG2三种结果绘制目标框。
五、结果展示: