前言
项目地址:https://github.com/riyuexingchennnn/BehaviorTreeMonitor
在ROS2机器人项目里,行为树是非常常见的任务组织方式。实际调试时,我们经常需要实时看到每个节点的状态变化,尤其是 subtree 内部节点。
我这次开源了一个基于 BehaviorTree.CPP Groot2 协议的监控工具,目标很直接:
- 实时可视化行为树状态
- 能稳定展示 20 个以上节点
- 对 subtree 内部节点也能完整显示
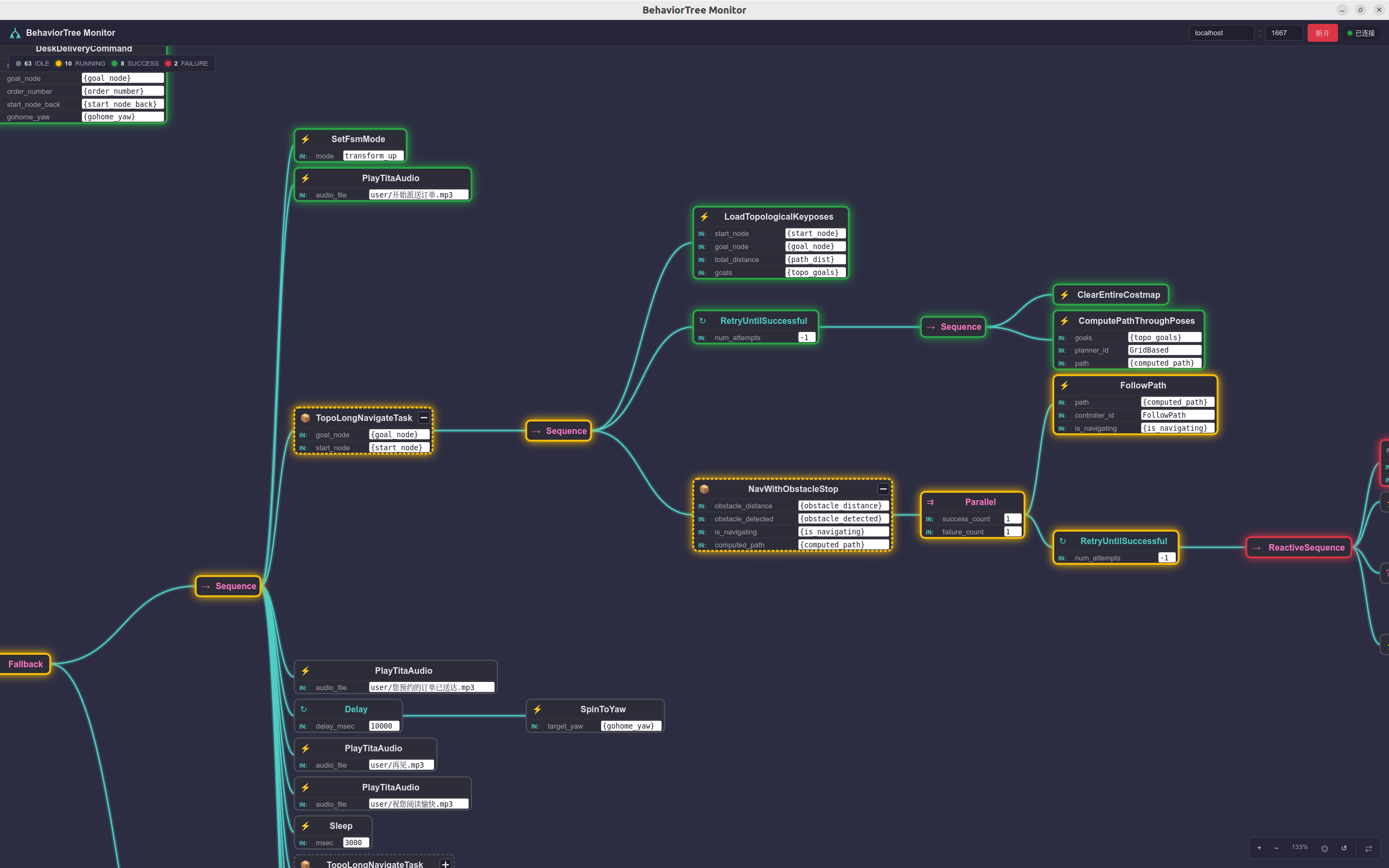
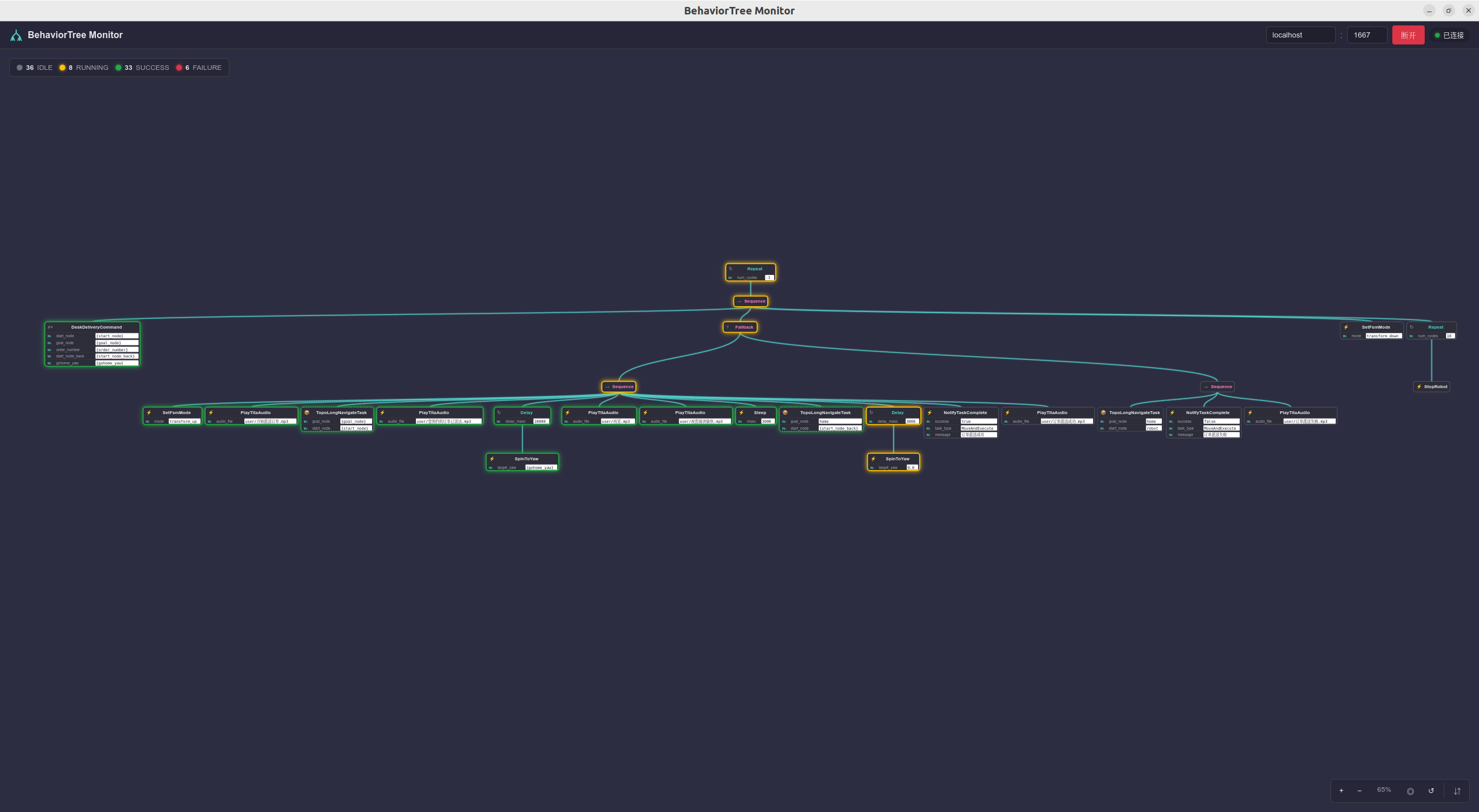
项目效果
核心能力
1. Groot2 协议兼容
项目通过 BT.CPP 的 Groot2Publisher 对接,能够直接接入已有行为树执行器,不需要改动太多业务代码。
2. 大节点量可视化
实际可展示 20+ 节点状态,包含 subtree 内部节点,适合中等复杂度以上的行为树调试。
3. 桌面应用 + Web 前端的混合架构
使用 Python 负责协议桥接和桌面承载,使用 Vue 3 + TypeScript 负责交互可视化,兼顾开发效率与可维护性。
架构设计
text
Python (PySide6 + aiohttp) Vue 3 + TypeScript
┌─────────────────────┐ ┌──────────────────┐
│ Qt WebEngineView │──HTTP──► │ 前端 (dist/) │
│ aiohttp Server │◄─WS───► │ WebSocket 客户端 │
│ ZMQ Bridge │◄─ZMQ──► │ │
└─────────────────────┘ └──────────────────┘
▲
│ ZMQ REQ/REP
▼
BT.CPP 执行器
(Groot2Publisher)数据流可以理解为三层:
- BT.CPP 执行器通过 ZMQ 与 Python 桥接层通信
- Python 侧通过 aiohttp 提供 WebSocket,将状态推给前端
- Qt WebEngineView 加载前端页面,形成完整桌面体验
项目结构
text
BehaviorTreeMonitor/
├── main.py # 入口
├── bt_monitor/
│ ├── protocol.py # BT.CPP Groot2 协议
│ ├── server.py # aiohttp WebSocket/ZMQ 桥接
│ └── app.py # Qt WebEngine 窗口
├── frontend/ # Vue 3 + TypeScript
│ ├── src/
│ │ ├── App.vue
│ │ ├── components/
│ │ ├── composables/
│ │ ├── stores/
│ │ ├── types/
│ │ └── styles/
│ └── ...
└── bt_monitor.spec # PyInstaller 配置快速开始
环境
- uv(Python 包管理)
- Node.js 18+
- pnpm
安装依赖
bash
# Python 依赖
uv sync
# 前端依赖
cd frontend && pnpm install本地运行
bash
# 先构建前端
cd frontend
pnpm build
# 回到项目根目录后启动
uv run python main.py构建发布
bash
# 1. 构建前端
cd frontend && pnpm install && pnpm build
# 2. PyInstaller 打包
uv run --group dev pyinstaller --clean --noconfirm bt_monitor.spec输出文件位于:dist/BehaviorTreeMonitor
下载使用
如果你不想自己构建,可以直接在 Release 页面下载编译版本:
https://github.com/riyuexingchennnn/BehaviorTreeMonitor/releases
Ubuntu 下首次运行需要先给可执行文件增加权限。
bash
sudo chmod +x BehaviorTreeMonitor.behaviortreemonitor结语
这个项目的初衷是解决Groot2监控行为树超过20个节点需要license的问题。如果本项目对你有用,欢迎在 GitHub 上点个 Star,或者在评论区留言交流!