目录
1.摘要
本文提出了一种新型元启发式优化算法------赏金猎人优化算法(BHO),其采用基于局部差异与随机扰动的去中心化位置更新策略,避免了传统均值聚合方法中的中心偏置和种群坍缩问题。进一步应用于多无人机移动边缘计算与路径规划(multi-UAV MEC-PP)问题时,BHO 能在服务质量约束下有效优化路径,并在不同规模仿真中实现超过 15% 的成本降低,表现出较强的可靠性与实用性。
2.BHO算法
基于聚类的代表性节点选择与分组(任务部署)
为避免初始种群在搜索空间同一局部区域内重复初始化、降低多样性,本文在生成过采样候选集后,不直接随机选点,而是对候选集 X o X_o Xo进行 K-means 聚类。通过最小化簇内方差并增强簇间分离性, X o X_o Xo被划分为 N N N个簇,各簇的质心作为其邻域的代表解,从而形成一个具有代表性且分散良好的初始种群。
自适应算子调度(协同分工)
自适应算子调度机制根据个体在子群中的相对排名/贡献度,动态分配其执行开发或探索两类搜索算子。
精细搜索
X i , j k t e s t = X i , j k + m i k ∗ ( c 1 i k ∗ r a n d ∗ ( X b e s t , j k − X i , j k ) + c 2 i k ∗ r a n d ∗ ( X b e s t , j k , l e a m l − X i , j k ) + c 3 i k ∗ r a n d ∗ ( X i , j b e s t − X i , j k ) ) \begin{aligned}X_{i,j}^ktest&=X_{i,j}^k+m_i^k\\&*\begin{pmatrix}c_{1_i}^k*rand*\left(X_{best,j}^k-X_{i,j}^k\right)+c_{2_i}^k*rand*\left(X_{best,j}^{k,leam_l}-X_{i,j}^k\right)+\\c_{3_i}^k*rand*\left(X_{i,j}^{best}-X_{i,j}^k\right)\end{pmatrix}\end{aligned} Xi,jktest=Xi,jk+mik∗(c1ik∗rand∗(Xbest,jk−Xi,jk)+c2ik∗rand∗(Xbest,jk,leaml−Xi,jk)+c3ik∗rand∗(Xi,jbest−Xi,jk))
粗略搜索分为随机参考点初略移动
X i , j k , r o u g h = { X i , j k + r a n d ( X r , j k , t e a m l − X i , j k ) , F i k ≤ F r k , t e a m l X i , j k − r a n d ( X r , j k , t e a m l − X i , j k ) , F i k > F r k , t e a m l X_{i,j}^{k,rough}=\begin{cases}X_{i,j}^k+rand\left(X_{r,j}^{k,teaml}-X_{i,j}^k\right),&F_i^k\leq F_r^{k,teaml}\\X_{i,j}^k-rand\left(X_{r,j}^{k,teaml}-X_{i,j}^k\right),&F_i^k>F_r^{k,teaml}&\end{cases} Xi,jk,rough=⎩ ⎨ ⎧Xi,jk+rand(Xr,jk,teaml−Xi,jk),Xi,jk−rand(Xr,jk,teaml−Xi,jk),Fik≤Frk,teamlFik>Frk,teaml
较大半径内进行随机扰动搜索:
X i , j k , t e s t = { X i , j k , r o u g h + m i k ⋅ r a n d 1 ⋅ X i , j k , r o u g h , r a n d 2 > 0.5 X i , j k , r o u g h − m i k ⋅ r a n d 1 ⋅ X i , j k , r o u g h , r a n d 2 ≤ 0.5 X_{i,j}^{k,test}=\begin{cases}X_{i,j}^{k,rough}+m_i^k\cdot rand_1\cdot X_{i,j}^{k,rough},&rand_2>0.5\\X_{i,j}^{k,rough}-m_i^k\cdot rand_1\cdot X_{i,j}^{k,rough},&rand_2\leq0.5&\end{cases} Xi,jk,test={Xi,jk,rough+mik⋅rand1⋅Xi,jk,rough,Xi,jk,rough−mik⋅rand1⋅Xi,jk,rough,rand2>0.5rand2≤0.5
采用Explorpolis 规则对新旧候选解进行筛选,若新解更优则直接保留;若不更优,则只有当精英集中不存在同时更优且更近的解时,才接受该候选解。候选解到精英集的归一化最近距离:
T D ( X t e s t , S ) = min x i ∈ S ∥ X t e s t − X o l d U − L ∥ 2 TD(X^{test},S)=\min_{x_i\in S}\left\|\frac{X^{test}-X^{old}}{U-L}\right\|_2 TD(Xtest,S)=xi∈Smin U−LXtest−Xold 2
强化搜索与基于 QPRS 的重新分配
当某个个体在其子群中连续多次处于后20%,此时算法触发重分配机制,重分配更新:
X i , j k t e s t = X i , j k + m i k ∗ ( c 1 i k ∗ r a n d ∗ ( X b e s t , j k − X i , j k ) + c 2 i k ∗ r a n d ∗ ( X b e s t , j k , t e a m n e w − X i , j k ) + c 3 i k ∗ r a n d ∗ ( X b e t t e r , j b e s t , t e a m n e w − X i , j k ) ) \begin{aligned}X_{i,j}^{k}test&=X_{i,j}^k+m_i^k\\&*\begin{pmatrix}c_{1_i}^k*rand*\left(X_{best,j}^k-X_{i,j}^k\right)+c_{2_i}^k*rand*\left(X_{best,j}^{k,team_{new}}-X_{i,j}^k\right)\\+c_{3_i}^k*rand*\left(X_{better,j}^{best,team_{new}}-X_{i,j}^k\right)\end{pmatrix}\end{aligned} Xi,jktest=Xi,jk+mik∗ c1ik∗rand∗(Xbest,jk−Xi,jk)+c2ik∗rand∗(Xbest,jk,teamnew−Xi,jk)+c3ik∗rand∗(Xbetter,jbest,teamnew−Xi,jk)
初始幅值由各组的累计贡献决定:
α 1 , l = C 1 , l ∑ C 1 , l \alpha_{1,l} = \frac{C_{1,l}}{\sum C_{1,l}} α1,l=∑C1,lC1,l
其中,组贡献按衰减方式递推更新:
C k , l = { 0 , k = 0 ( 1 − ρ ) C k − 1 , l + ∑ i ∈ B c i k , k > 0 C_{k,l} = \begin{cases} 0, & k=0 \\ (1-\rho)C_{k-1,l} + \sum_{i \in B} c_i^k, & k > 0 \end{cases} Ck,l={0,(1−ρ)Ck−1,l+∑i∈Bcik,k=0k>0
个体贡献定义为:
c i k = { 0 , k = 0 1 − F i k ∑ i F i k , k > 0 c_i^k = \begin{cases} 0, & k=0 \\ 1 - \frac{F_i^k}{\sum_i F_i^k}, & k > 0 \end{cases} cik={0,1−∑iFikFik,k=0k>0
3.多无人机移动边缘计算
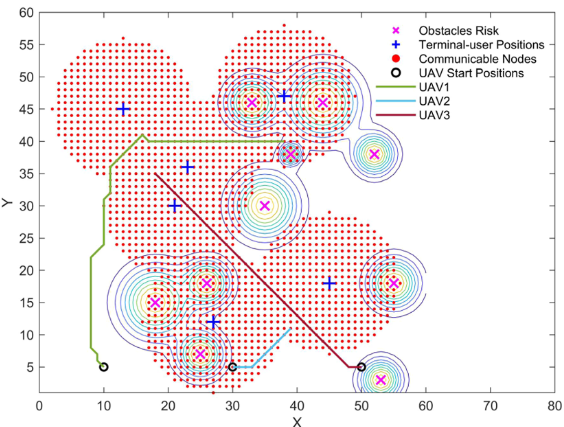
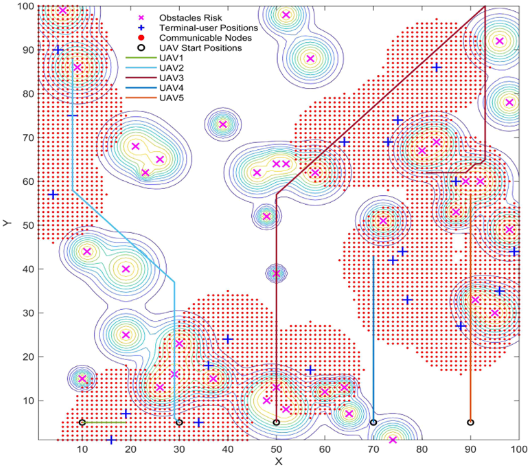
多无人机移动边缘计算与路径规划(Multi-UAV MEC-PP)指QoS 约束下的联合优化,目标为最小化路径代价、风险代价、服务收益项及负载差异项的综合成本:
min Z = w d C d + w r C r + w u C u + ( max ( C u ) − min ( C u ) ) \min Z = w_d C_d + w_r C_r + w_u C_u + \left( \max(C_u) - \min(C_u) \right) minZ=wdCd+wrCr+wuCu+(max(Cu)−min(Cu))
其中,路径代价为:
C d = ∑ t ∈ T ∑ ( i , j ) ∈ A ∑ g ∈ G d i j X i j g t C_d = \sum_{t \in T} \sum_{(i,j) \in A} \sum_{g \in G} d_{ij} X_{ijg}^t Cd=t∈T∑(i,j)∈A∑g∈G∑dijXijgt
风险代价为:
C r = ∑ t ∈ T ∑ ( i , j ) ∈ A ∑ g ∈ G X i j g t { 1 − ∏ o ∈ O 1 − e − d i j 2 2 σ o 2 } C_r = \sum_{t \in T} \sum_{(i,j) \in A} \sum_{g \in G} X_{ijg}^t \left\{ 1 - \prod_{o \in O} \left 1 - e\^{-\\frac{d_{ij}\^2}{2\\sigma_o\^2}} \\right \right\} Cr=t∈T∑(i,j)∈A∑g∈G∑Xijgt{1−o∈O∏1−e−2σo2dij2}
服务收益项为:
C u = ∑ t ∈ T ∑ ( i , j ) ∈ A ∑ g ∈ G ∑ k ∈ K μ g k t { exp − u k η u k + β − exp − ( u k − ϑ ) η u k + β } C_u = \sum_{t \in T} \sum_{(i,j) \in A} \sum_{g \in G} \sum_{k \in K} \mu_{gk}^t \left\{ \exp\left -\\frac{u_k \\eta}{u_k + \\beta} \\right - \exp\left -\\frac{(u_k - \\vartheta)\\eta}{u_k + \\beta} \\right \right\} Cu=t∈T∑(i,j)∈A∑g∈G∑k∈K∑μgkt{exp−uk+βukη−exp−uk+β(uk−ϑ)η}
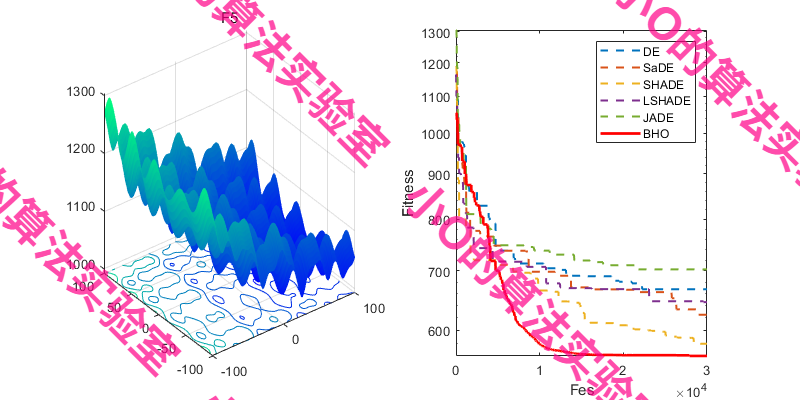
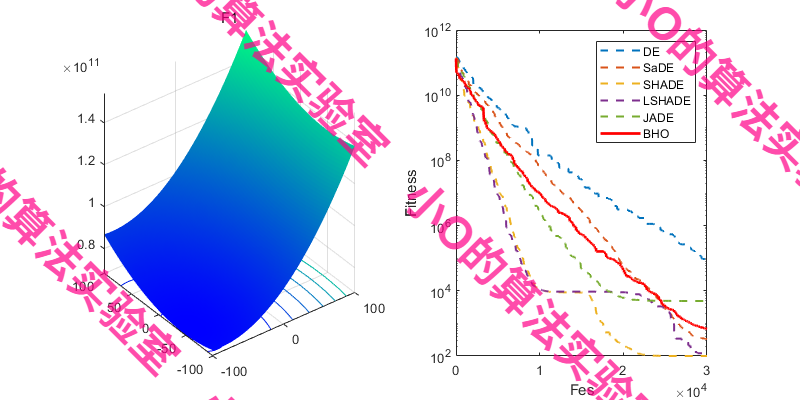
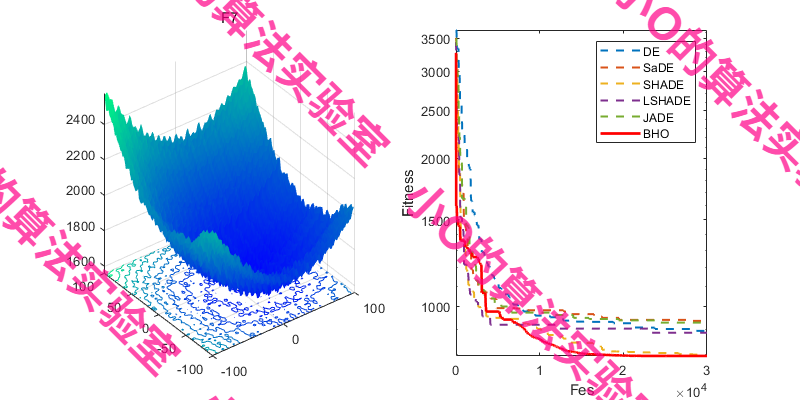
4.结果展示
5.参考文献
1 Yu M, Yang H, Zhang J, et al. Bounty Hunter Optimizer: A Novel Metaheuristic with an Application to Multi-UAV Mobile Edge Computing and Path PlanningJ. Knowledge-Based Systems, 2026: 115836.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx