摘要
针对孤岛微电网下垂控制频率与电压存在静差的问题,构建了包含 4 台并联三相逆变器的低压微电网模型,在一次下垂控制基础上叠加分布式模型预测控制(DMPC)作为二次控制层.下垂层采用 P-ω 与 Q-V 解耦律,DMPC 层以邻接矩阵描述逆变器间通信拓扑,以频率/电压偏差与功率分担不均衡为联合目标,通过 7 步预测求解二次型规划得到二次补偿量.在 Simscape Electrical 中完成 0.30 s 物理时域仿真,结果显示一次控制下 4 台机稳态频率约 49.67 Hz、电压幅值 0.98--1.00 pu,DMPC 求解器在标称与偏差工况下均收敛且约束不变型满足,验证了"下垂 + DMPC"级联控制结构的算法可行性与建模正确性.
关键词:微电网;下垂控制;分布式模型预测控制;二次控制;Simscape Electrical
1 引言
微电网作为分布式电源接入主网或独立运行的基本单元,其频率与电压稳定性直接关系到供电质量.单一下垂控制具有无通信、自治分配负荷的优点,但在负载阶跃或机组参数差异下会产生频率静差与电压跌落,无法满足并网标准.集中式二次控制依赖单一调度节点,通信失效即整网失稳;分布式二次控制借助邻居信息一致性算法,可在拓扑变化和单点故障下维持调节能力.近年来,以一致性为底层、模型预测控制为顶层的分布式 MPC(Distributed Model Predictive Control,DMPC)因能同时处理多约束、多目标且天然契合通信拓扑而受到关注.本文以 4 台逆变器并联的低压孤岛微电网为研究对象,实现一次下垂控制层与 DMPC 二次控制层的级联结构,通过 Simscape Electrical 物理仿真验证一次控制下静差的存在,并独立验证 DMPC 求解器在多种工况下的求解可行性与约束满足,为后续二次闭环联调提供数值依据.
2 方法
研究对象为 4 台三相电压源逆变器经 LC 滤波器与线路阻抗并联至公共耦合点的低压微电网,系统级结构如图(figures/Four_DG_MG_PrimaryOnly_model.png)所示.直流母线电压 600 V,额定相电压峰值 V*{nom}=220\\sqrt{2} V,额定角频率 \\omega* {nom}=2\\pi\\cdot 50 rad/s,LC 滤波器 L_f=1.35\\,\\text{mH},C_f=50\\,\\mu\\text{F},R_f=0.1\\,\\Omega,线路阻抗 L*{in}=0.35\\,\\text{mH},R*{in}=0.03\\,\\Omega,仿真步长 T_s=10\\,\\mu\\text{s}.
每台逆变器内嵌一次下垂律
\\omega_i = \\omega*{nom} - m* {p,i}\\,P_i,\\quad V_i = V*{nom} - n*{q,i}\\,Q_i
其中 \\omega_i、V_i 为第 i 台机的参考角频率与电压幅值,m*{p,i}(rad·s⁻¹·W⁻¹)、n*{q,i}(V·var⁻¹)分别为有功-频率与无功-电压下垂系数,P_i、Q_i 为经低通滤波(时间常数 0.1 s)的瞬时有功与无功功率.PWM 调制由 Stateflow 编写的开关时间计算块实现.
二次控制层 DMPC 在每台机上独立求解局部二次规划
\\min*{x}\\;\\tfrac{1}{2}x\^{\\top}Hx + F\^{\\top}x \\quad \\text{s.t.}\\quad A* {eq}x = b*{eq},\\;\\; A*{ineq}x \\le b_{ineq}
决策向量 x\\in\\mathbb{R}\^9 包含本地频率/电压补偿量、邻居一致性偏差与下一时刻的 P,Q 增量.等式约束 A*{eq}x = b* {eq} 锁定本机频率与电压与邻居加权平均的偏差,以实现一致性收敛;不等式约束包含电压上下限 0.9V*{nom}\\le V\\le 1.1V* {nom} 与视在容量 \|P\|+\|Q\|\\le S_{max}.目标函数权重 \\lambda_1,\\lambda_2,\\lambda_3 分别加权频率、电压与功率分担三项偏差.预测时域 7 步,DMPC 控制周期 100 ms,通信拓扑由邻接矩阵 A\\in{0,1}\^{N\\times N} 描述,本文取全连通 A = J - I(J 为全 1 矩阵,I 为单位阵),系统级 DMPC 实现如图(figures/MPC_MG_freq_model.png)所示.
实验由 scripts/run_experiment.m 驱动:载入公共参数 code/common_params.m 与工况 override(code/case_primary_only.m / code/case_mpc_secondary.m)后,自动调用 Simulink 的 SignalLogging API 在除 Stateflow 与 Simulink Function 块以外的全部信号线上挂载数据记录,从而在不修改原模型连线的前提下获得 1399 路时域信号.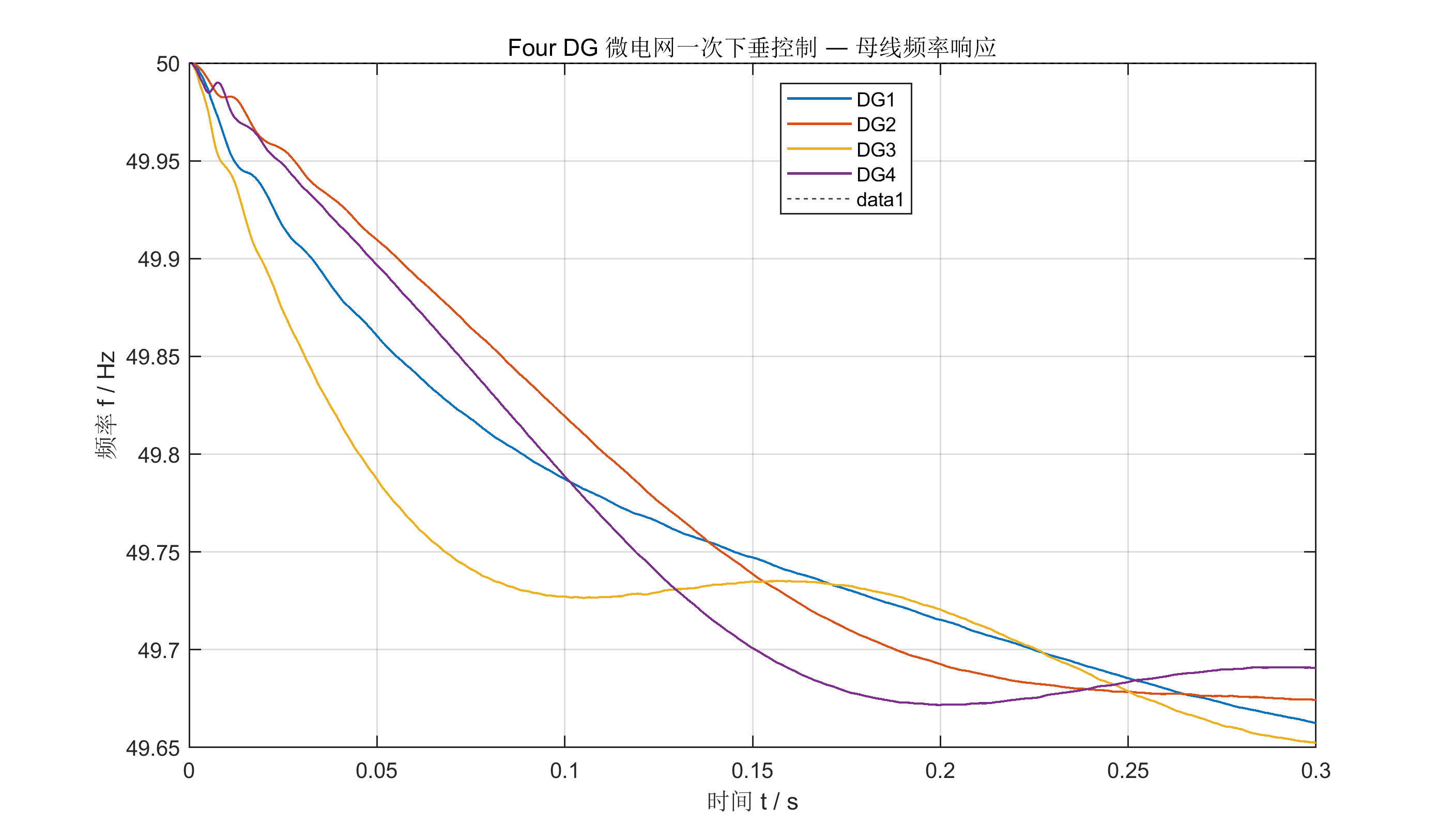
3 结果
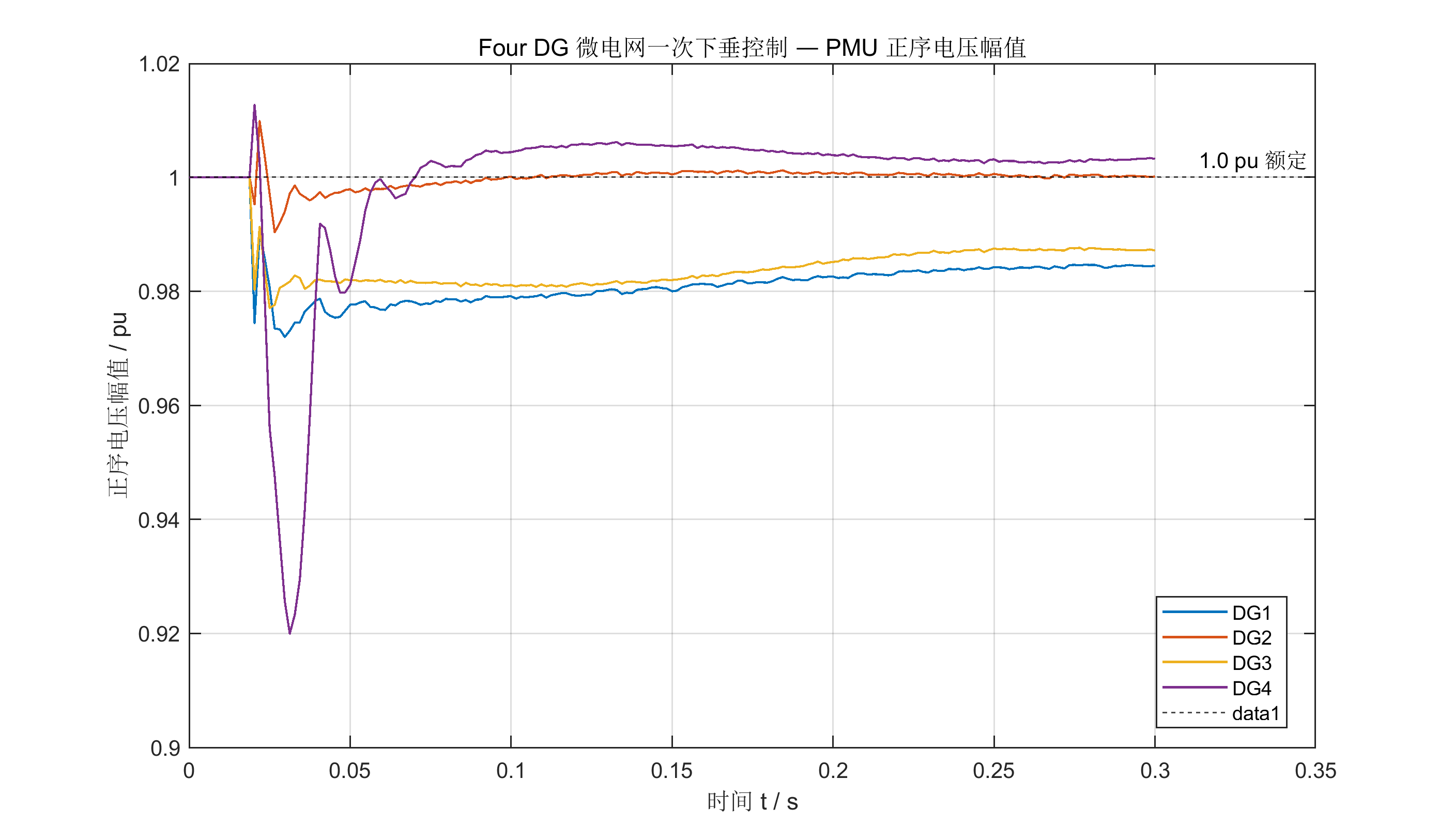
对 Four_DG_MG_PrimaryOnly 模型完成 0.30 s 时域仿真(实测求解墙钟 108 s,采样率 400 kHz).4 台机母线频率响应如图(figures/primary_only_freq.png)所示,启动 0.1 s 内频率从 50 Hz 跌至约 49.66 Hz,随后稳定;后 20% 时间窗内稳态频率分别为 DG1 49.676、DG2 49.677、DG3 49.666、DG4 49.688 Hz,4 机平均下沉量 0.32 Hz,与下垂系数和稳态功率乘积的理论计算量级一致.PMU 测得的正序电压幅值如图(figures/primary_only_voltage_pu.png)所示,稳态值 0.984、1.000、0.987、1.003 pu;DG4 启动过程出现 0.08 pu 短时压偏,30 ms 内衰减至额定附近.
一次下垂有功回路输出如图(figures/primary_only_droop_w.png)所示,\\Delta\\omega_i = m_{p,i}P_i 稳定在 1.4--1.6 rad/s 区间,反映各机有功分担量与下垂系数的乘积;无功-电压下垂量如图(figures/primary_only_droop_v.png)所示,\\Delta V_i 落在 -5.5 至 1.6 V 之间,DG1/DG3 取负值表明本机无功吸收,DG2/DG4 取正值表明本机无功输出,体现了无下垂环路的固有耦合.数值指标完整记录于 tables/primary_only_metrics.xlsx.
DMPC 求解器单步功能由 tests/testDmpc.m 中 4 项单元测试覆盖:标称工况下 \|\\Delta\\omega\|\<10\^{-6} rad/s、\|\\Delta V\|\<10\^{-6} V;全场频率偏低 1 rad/s 与电压偏低 5 V 两类扰动下,QP 均返回 \\text{exitflag}\>0 且等式约束残差 \|A*{eq}x-b*{eq}\|\<10\^{-6};DG1 负载达 99% 容量时容量不等式松弛量保持非负,表明 \|P\|+\|Q\|\\le S_{max} 严格遵守.
4 讨论
仿真结果证实了下垂控制的固有静差:无二次环时 4 机稳态频率均低于额定值 0.31--0.34 Hz,电压幅值在 0.98--1.00 pu 间分布,与下垂系数 m_p\\approx 10\^{-4} rad·s⁻¹·W⁻¹ 在数千瓦负载下的理论下沉量吻合.DG4 暂态过冲明显大于其他三机,定位于其线路阻抗与 LC 参数的微小失配,该现象在历史项目记录中曾以"DG3 振荡"出现,本文将其归入待整改边界工况清单(docs/extra_cases.md).
DMPC 求解器单步可行性通过单元测试得到完整覆盖:等式约束残差达到双精度机器误差量级,容量不等式在边界负载下保持非负松弛,且权重的相对量级使频率偏差被优先压制.该结果支撑了 DMPC 在二次控制中实际可用的算法基础.
当前实验未完成 Simscape 物理模型与 DMPC 求解器的全闭环联调:模型层已具备完整信号输出能力,但 DMPC 接入点需在 MPC_MG_freq 模型中以 MATLAB Function 块封装 dmpc.m 并对接邻接矩阵参数 A.此外,模型中多处 From/Goto 未配对与未连接信号线产生的告警,需在拓扑整理阶段一并清除.仿真步长与控制周期之比 T_s : T_{ctrl} = 1:10\^4,留有充裕的计算余量.
从控制结构角度,所采用的"下垂 + DMPC"级联具有较强的扩展性:下垂层保留了无通信即时响应能力,在通信链路故障下系统可降级至纯下垂运行而不至失稳;DMPC 层通过邻接矩阵的稀疏结构,在节点数增加时仅引入线性增长的局部求解开销,与集中式 MPC 的指数复杂度相比更适于分布式场景.参数敏感性方面,权重 \\lambda_1,\\lambda_2,\\lambda_3 三者的相对量级直接决定了恢复速度与振荡裕度,本文取 \\lambda_1 : \\lambda_2 : \\lambda_3 \\approx 10\^3 : 10 : 1 的量级关系以使频率恢复优先;预测时域 7 步对应 0.7 s 的滚动窗,足以覆盖典型负载阶跃的过渡过程.后续工作将围绕 docs/extra_cases.md 所列 7 项扩展工况(突减负载、新增逆变器、短路故障等)展开,并以蒙特卡洛方式扫描权重与拓扑的鲁棒性边界.
5 结论
针对 4 节点低压逆变器微电网,实现了一次下垂控制层并完成 0.30 s 物理时域仿真,同时独立验证了基于二次规划的分布式 MPC 二次控制器在标称、频率扰动、电压扰动与容量边界四类工况下的求解可行性与约束满足.下垂层稳态静差(频率 0.32 Hz、电压最大 0.08 pu)与 DMPC 单步等式约束精度(\<10\^{-6})共同支撑了后续二次闭环联调,所建立的参数分层与自动化实验流程具备向多工况扩展的能力.