Linux 物联网网关主控系统-感知层部分(三)
- [一、核心设备程序(3 类)](#一、核心设备程序(3 类))
- [二、传感器驱动模块(6 类)](#二、传感器驱动模块(6 类))
- [三、外设驱动模块(4 类)](#三、外设驱动模块(4 类))
- [四、协议栈 / 应用层公共模块(3 类)](#四、协议栈 / 应用层公共模块(3 类))
- 五、各模块之间的核心关联关系
-
-
- [ZigBee 协调器与终端节点数据交互流程](#ZigBee 协调器与终端节点数据交互流程)
-
一、核心设备程序(3 类)
1. 协调器程序:coordinator.c
核心作用:ZigBee 网络的创建者、数据汇聚中心、控制指令下发端,是整个网络的核心节点。
建网:初始化网络并分配唯一 PAN ID,开放入网权限,允许路由器 / 终端加入;
数据接收:接收终端节点上传的温湿度、光照、气体、人体红外等环境数据,通过串口输出(上位机可读取);
指令下发:通过串口接收外部控制指令,解析后无线下发给指定终端节点,控制继电器、蜂鸣器、LED;
基础初始化:完成 UART、LCD、ZigBee 端点注册、OSAL 任务初始化,注册按键、网络状态等事件回调。
coordinator.c新增代码
新增 串口初始化,绑定接收回调函数 rxCB
新增 LCD 初始化与清屏函数
改写 rxCB():发送(电脑 → 协调器 → 终端)
改写 GenericApp_MessageMSGCB(): 接收(终端 → 协调器 → 电脑)
1.rxCB()
电脑发指令 → 协调器收到 → 转发给 ZigBee 终端
c
// 串口接收回调函数:电脑发指令 → 协调器转发给终端节点
static void rxCB(uint8 port,uint8 event)
{
uint8 uartbuf[4] = {0}; // LCD显示缓存
uint8 cmd; // 串口接收的指令
HalUARTRead(0,&cmd,1); // 从串口读取1字节指令
// 判断是否为合法节点号(0~3号节点)
if((cmd & STO_MASK) == (0 << 6)
||(cmd & STO_MASK) == (1 << 6)
||(cmd & STO_MASK) == (2 << 6)
||(cmd & STO_MASK) == (3 << 6)
)
{
sprintf(uartbuf,"cmd:%x",cmd); // 格式化指令
HalLcdWriteString(uartbuf,HAL_LCD_LINE_4); // LCD第四行显示
// ZigBee无线发送指令到终端设备
if(AF_DataRequest( &GenericApp_DstAddr, &GenericApp_epDesc,
GENERICAPP_CLUSTERID,
1,
&cmd,
&GenericApp_TransID,
AF_DISCV_ROUTE, AF_DEFAULT_RADIUS )==afStatus_SUCCESS)
{
}
}
}2.clear_lcd()
LCD 清屏
c
// LCD清屏函数
void clear_lcd(void)
{
BACK_COLOR=MAGENTA; // 背景色
POINT_COLOR=YELLOW; // 字体色
LCD_Clear(BACK_COLOR); // 清屏
return;
}LCD
c
HalLcdInit();//LCD初始化
clear_lcd();//清屏3.GenericApp_Init初始化部分也新增
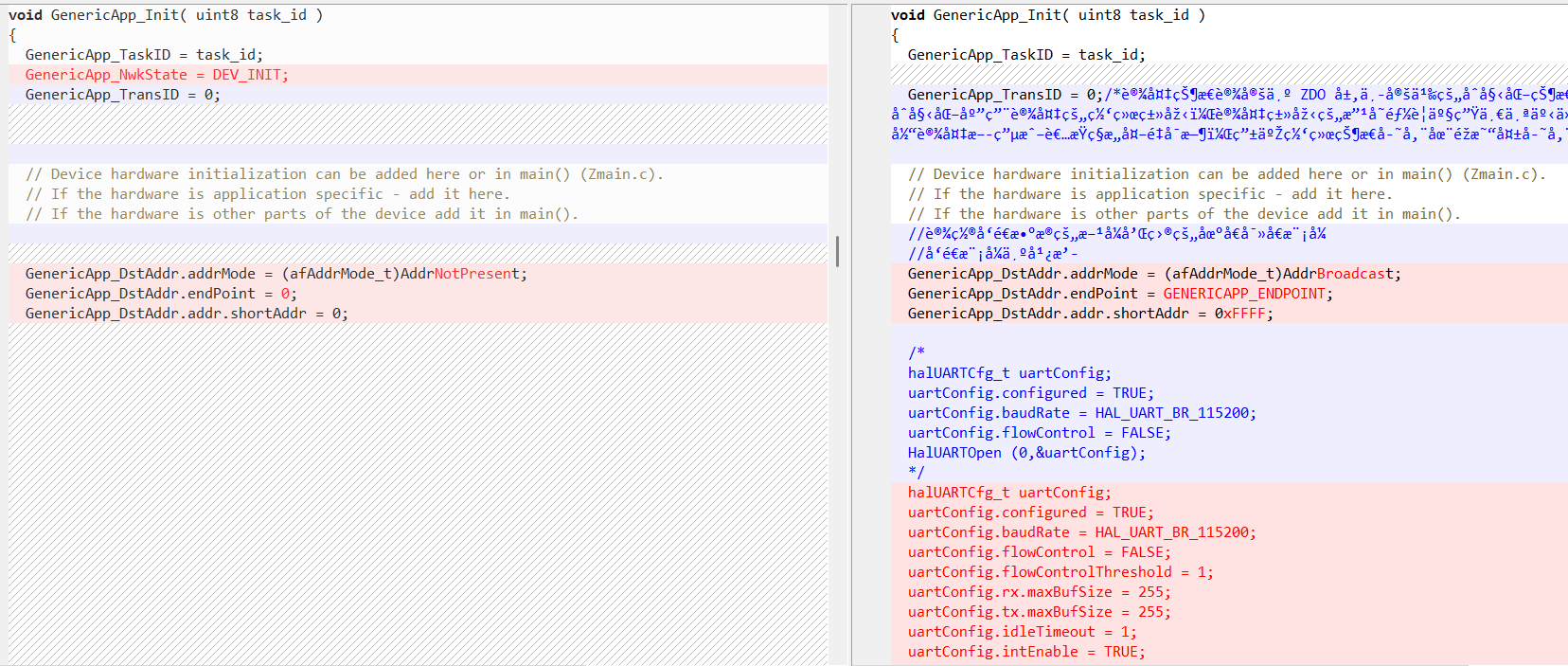
主要是串口初始化
c
halUARTCfg_t uartConfig;
uartConfig.configured = TRUE;
uartConfig.baudRate = HAL_UART_BR_115200;
uartConfig.flowControl = FALSE;
uartConfig.flowControlThreshold = 1;
uartConfig.rx.maxBufSize = 255;
uartConfig.tx.maxBufSize = 255;
uartConfig.idleTimeout = 1;
uartConfig.intEnable = TRUE;
uartConfig.callBackFunc = rxCB;
HalUARTOpen (HAL_UART_PORT_0, &uartConfig);4.GenericApp_MessageMSGCB
协调器收到终端发来的传感器数据 → 直接通过串口上传给电脑显示
c
// 接收ZigBee终端发来的数据的回调函数
static void GenericApp_MessageMSGCB( afIncomingMSGPacket_t *pkt )
{
// 判断收到的是哪个簇ID(对应不同终端/传感器)
switch ( pkt->clusterId )
{
case GENERICAPP_CLUSTERID1: // 终端1数据
case GENERICAPP_CLUSTERID2: // 终端2数据
case GENERICAPP_CLUSTERID3: // 终端3数据
case GENERICAPP_CLUSTERID4: // 终端4数据
HalUARTWrite(0, pkt->cmd.Data,24); // 把数据通过串口发给电脑
break;
}
}2. 路由器程序:router.c
核心作用:ZigBee 网络的信号中继器、数据转发端,扩展网络覆盖范围,无独立业务逻辑。
入网:自动搜索并加入协调器创建的网络,作为 FFD 全功能设备运行;
转发:透明转发协调器与终端之间的所有数据 / 指令(无需解析),解决终端与协调器距离过远的通信问题;
基础适配:与协调器共用核心协议栈逻辑,仅简化了硬件初始化(无 LCD、串口指令解析),仅保留 ZigBee 通信能力。
3. 终端节点程序:enddevice.c
核心作用:ZigBee 网络的数据采集端、外设执行端,是感知层核心,负责物理世界的信息采集和设备控制。
入网:自动搜索并加入协调器 / 路由器的网络,作为 RFD 精简功能设备运行,功耗更低;
数据采集:定时采集温湿度(DHT11)、光照、气体浓度、人体红外等环境数据,封装为统一的_EnvMsg数据结构;
定时上报:基于 OSAL 定时器实现周期性数据上报(默认 1 秒),通过 ZigBee 无线发送给协调器;
外设控制:接收协调器下发的控制指令,解析后驱动继电器、蜂鸣器、LED 执行对应动作;
硬件初始化:完成所有传感器、外设的底层初始化,以及 ZigBee 端点、OSAL 任务注册。
enddevice.c新增代码
引入传感器 / 外设驱动头文件,支持硬件扩展
新增 LCD 功能:清屏函数 + 中文标题显示
初始化新增:外设、传感器、LCD 初始化
新增 SyncData ():采集所有传感器数据并显示
新增定时上报:定时器事件 → 采集数据 → 无线发给协调器
新增外设控制函数:蜂鸣器、LED 开关控制
新增指令解析:接收协调器指令 → 控制外设
最核心
1.发送:定时采集传感器数据 → 无线发给协调器
实现:SyncData() + 定时器事件 + AF_DataRequest()
2.接收:接收协调器控制指令 → 控制外设
实现:GenericApp_MessageMSGCB() + XXXCtrl()
1.传感器等头文件
c
#include"dht11.h"
#include"beep.h"
#include "led.h"
#include"relay.h"
#include"Gas_head.h"
#include"Infrare_head.h"
#include"light.h"
#include"Temperature_head.h"
#include"stdio.h"
#include"string.h"
#include"relay.h"
#include "chinese.h"2.屏幕相关
c
void clear_lcd(void);
void clear_lcd(void)
{
BACK_COLOR=MAGENTA;
POINT_COLOR=YELLOW;
LCD_Clear(BACK_COLOR);
return;
}
void show_title(void);
void show_title(void)
{
char offset = 20;
showhanzi16x16(0 + offset,30,0,wu,YELLOW,BACK_COLOR);
showhanzi16x16(17+ offset,30,0,xian,YELLOW,BACK_COLOR);
showhanzi16x16(34+ offset,30,0,chuan,YELLOW,BACK_COLOR);
showhanzi16x16(51+ offset,30,0,gan,YELLOW,BACK_COLOR);
showhanzi16x16(68+ offset,30,0,wang,YELLOW,BACK_COLOR);
return;
}3.GenericApp_Init
其中在调用初始化
c
InitBeep();
InitLed();
InitRelay();
Init_infrare();
HalLcdInit();
clear_lcd();4.同步数据并显示
终端节点采集所有传感器数据 → 统一存入结构体 EnvMsg → 同时显示在 LCD 上
c
#define HONGWAI P0_5
struct _EnvMsg EnvMsg;
void SyncData(unsigned char sto_no) //把所有采集的数æ®åŒæ¥åˆ°ç>>"æž„ä½"EnvMsgä¸
{
char buf[10]={0};
memset(&EnvMsg,0,sizeof(EnvMsg));
EnvMsg.head[0] = 's';
EnvMsg.head[1] = 't';
EnvMsg.head[2] = ':';
EnvMsg.type = 'e';
EnvMsg.ep_no = sto_no;
readDHT11();
EnvMsg.temp[0] = (unsigned char)ucharT_data_L;
EnvMsg.temp[1] = (unsigned char)ucharT_data_H;
EnvMsg.hum[0] = (unsigned char)ucharRH_data_L;
EnvMsg.hum[1] = (unsigned char)ucharRH_data_H;
sprintf(buf,"temp:%d",EnvMsg.temp[1]);
HalLcdWriteString(buf,HAL_LCD_LINE_5);
sprintf(buf,"hum:%d",EnvMsg.hum[1]);
HalLcdWriteString(buf,HAL_LCD_LINE_6);
EnvMsg.lux = (unsigned int)myApp_ReadLightLevel();
sprintf(buf,"li:%d",EnvMsg.lux);
HalLcdWriteString(buf,HAL_LCD_LINE_7);
EnvMsg.hongwai = HONGWAI;
EnvMsg.gas = (unsigned int)myApp_ReadGasLevel();
sprintf(buf,"gas:%d",EnvMsg.gas);
HalLcdWriteString(buf,HAL_LCD_LINE_8);
}5.定时器定时上报传感器数据
c
// 定时器事件:每隔一段时间发送一次传感器数据
if ( events & GENERICAPP_SEND_MSG_EVT )
{
// 1. 采集所有传感器数据(温湿度、光照、气体、红外)
SyncData(ENDDEVICE_ID);
// 2. 把结构体数据拷贝到发送缓冲区
memcpy(sendbuf, &EnvMsg, 24);
// 3. 通过 ZigBee 无线把 24 字节数据发给协调器
AF_DataRequest( &GenericApp_DstAddr, &GenericApp_epDesc,
GENERICAPP_CLUSTERID1,
24,
(uchar *)&EnvMsg,
&GenericApp_TransID,
AF_DISCV_ROUTE, AF_DEFAULT_RADIUS );
// 4. 重新启动定时器,循环上报
osal_start_timerEx( GenericApp_TaskID,
GENERICAPP_SEND_MSG_EVT,
ENDDEVICE_SEND_MSG_TIMEOUT );
// 清除事件标志
return (events ^ GENERICAPP_SEND_MSG_EVT);
}6.相关Ctrl
c
uint8_t DeviceStatus;
void BeepCtrl(uint8_t cmd)
{
switch(cmd)
{
case BEEP_OFF:
DeviceStatus &= ~0x02;
BeepOff();
//HalLcdWriteString("beep on",HAL_LCD_LINE_5);
break;
case BEEP_ON:
DeviceStatus |= 0x02;
BeepOn();
//HalLcdWriteString("beep off",HAL_LCD_LINE_5);
break;
default:
break;
}
}
void LedCtrl(uint8_t cmd)
{
switch(cmd)
{
case LED_OFF:
DeviceStatus &= ~0x04;
//HalLcdWriteString("led off",HAL_LCD_LINE_5);
LedOff();
break;
case LED_ON:
DeviceStatus |= 0x04;
//HalLcdWriteString("led on",HAL_LCD_LINE_5);
LedOn();
break;
default:
break;
}
}
int cmdcount = 0;七、GenericApp_MessageMSGCB
c
// 终端接收协调器无线指令的回调函数
static void GenericApp_MessageMSGCB( afIncomingMSGPacket_t *pkt )
{
uint8_t cmd = 0;
char buf[10];
// 判断是不是控制指令
switch ( pkt->clusterId )
{
// 收到协调器发来的控制指令
case GENERICAPP_CLUSTERID:
// 取出1字节指令
cmd = *(pkt->cmd.Data);
// 判断:这个指令是不是发给【本终端】的
if((cmd & STO_MASK) == (ENDDEVICE_ID << 6))
{
// 把指令显示在LCD + 串口
sprintf(buf,"cmd:%x",cmd);
HalUARTWrite(0, buf,strlen(buf));
HalLcdWriteString(buf,HAL_LCD_LINE_4);
// 判断:控制哪个设备(继电器/蜂鸣器/LED)
switch(cmd & DEV_MASK)
{
case RELY: // 控制继电器
RelyCtrl(cmd & CMD_MASK);
break;
case BEEP: // 控制蜂鸣器
BeepCtrl(cmd & CMD_MASK);
break;
case LED: // 控制LED灯
LedCtrl(cmd & CMD_MASK);
break;
default :
break;
}
}
break;
}
}二、传感器驱动模块(6 类)
传感器驱动模块说明
| 模块文件 | 对应传感器 | 核心作用 |
|---|---|---|
| dht11.c/dht11.h | DHT11 温湿度传感器 | 初始化 IO 口,实现温湿度数据的读取、校验,提供 readDHT11() 核心接口 |
| Human_Body_infrared.c/Infrare_head.h | 人体红外传感器 | 初始化 P0.5 口,检测人体存在状态,返回格式化的状态字符串(KaTeX parse error: Expected 'EOF', got '#' at position 4: yes#̲/no#) |
| Gas.c/Gas_head.h | 气体传感器 | 初始化 ADC 采集通道,读取气体浓度模拟值,完成 AD 转换并格式化输出 |
| light.c/light.h | 光照传感器 | 初始化 ADC 采集通道,读取光照强度模拟值,完成 AD 转换并格式化输出 |
| Temperature_head.h | 18B20 温度传感器 | 预留 18B20 驱动接口(未实现完整代码),兼容数字温度传感器采集 |
三、外设驱动模块(4 类)
外设驱动模块说明
| 模块文件 | 对应外设 | 核心作用 |
|---|---|---|
| beep.c/beep.h | 蜂鸣器 | 初始化 P0.0 口,提供 BeepOn()/BeepOff() 蜂鸣器开关接口 |
| led.c/led.h | LED 灯 | 初始化 P1.0/P1.1/P1.4 口,提供 LedOn()/LedOff() LED 组控接口,支持状态上报 |
| relay.c/relay.h | 继电器 | 初始化 P1.3 口,提供 RelayOn()/RelayOff() 继电器开关接口,封装 RelyCtrl() 指令控制接口 |
| head.h | 公共类型定义 | 定义通用数据类型(uchar/uint)、宏常量(SIZE),作为所有驱动的基础头文件 |
四、协议栈 / 应用层公共模块(3 类)
- GenericApp.h
应用层公共头文件,是整套系统的业务约定核心,所有设备程序、驱动模块均依赖此文件,定义了:
ZigBee 通信参数:端点号、配置文件 ID、簇 ID(区分不同节点 / 数据类型);
数据结构:_EnvMsg统一环境数据结构(温湿度、光照、气体、红外等),规范终端与协调器的数据交互格式;
控制指令掩码:节点号掩码(STO_MASK)、设备号掩码(DEV_MASK)、命令字掩码(CMD_MASK),规范控制指令的解析规则;
宏常量:外设控制命令(如 BEEP_ON/LED_OFF)、定时器超时时间、OSAL 事件定义;
公共函数声明:外设控制、数据同步等跨模块函数。
- OSAL_GenericApp.c
Z-Stack OSAL 任务调度配置,是协议栈的任务入口,定义了:
任务数组tasksArr\[\]:按优先级排列所有协议栈任务(MAC、NWK、HAL、APS 等)和应用层任务(GenericApp),应用层任务优先级最低;
任务初始化osalInitTasks():依次初始化所有协议栈任务和应用层GenericApp_Init(),为应用层分配 Task ID;
核心作用:实现 OSAL 操作系统的任务调度,让应用层基于事件驱动运行(如定时器事件、数据接收事件、网络状态事件)。
- 协议栈底层依赖(无独立文件,集成在 Z-Stack 中)
包含 MAC 层、NWK 层、APS 层、ZDO 层等,封装了 ZigBee 无线通信的底层细节,向上提供统一的 API(如AF_DataRequest()数据发送、osal_start_timerEx()定时器、ZDO_STATE_CHANGE网络状态事件),让开发者无需关注底层通信,仅需开发应用层业务。
五、各模块之间的核心关联关系
Z-Stack协议栈(MAC/NWK/APS/OSAL)
↓ 提供通信/调度API
核心设备程序(coordinator/enddevice/router)
↓ 调用驱动接口采集/控制
传感器驱动/外设驱动模块
↓ 操作硬件寄存器
物理硬件(传感器/外设/无线射频)
PS:关于Zigbee部分
GenericApp.h
OSAL_GenericApp.c
Z-Stack 协议栈底层文件(所有底层)
它们是 TI 官方给的框架,只使用,不修改。
对于本项目,只写在这两个文件里:
coordinator.c ------ 协调器(收数据、发指令)
enddevice.c ------ 终端节点(采传感器、控制外设)
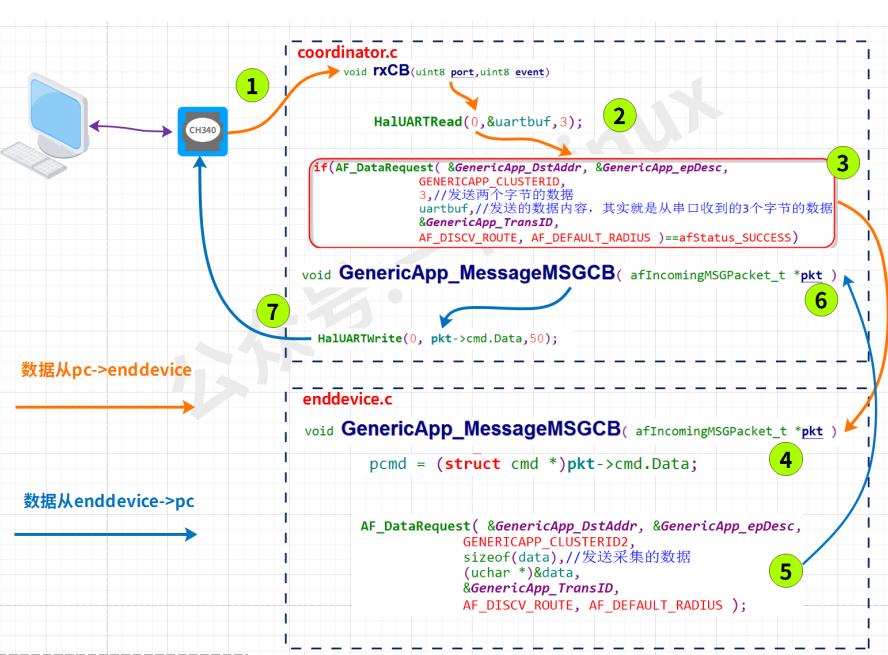
ZigBee 协调器与终端节点数据交互流程
- 上位机通过串口发送数据给协调器;
- 触发协调器串口回调函数
rxCB(),通过HalUARTRead()从串口提取出数据; - 协调器通过
AF_DataRequest()将数据发送给网络中其他设备,通过 id:GENERICAPP_CLUSTERID,表明该数据是协调器发送; - 触发终端节点回调函数
GenericApp_MessageMSGCB(),协调器 id 存放在pkt->clusterId中,发送的数据存放在pkt->cmd.data中; - 终端节点可以采集传感器数据,发送数据在缓冲区
data中,然后通过函数AF_DataRequest()发送数据,填充 id:GENERICAPP_CLUSTERID2,表示数据是节点 2 发送; - 触发协调器的回调函数
GenericApp_MessageMSGCB(); - 协调器提取出终端节点发送的数据
pkt->cmd.data,通过HalUARTWrite()发送给上位机。