OpenClaw的安装部署 + 连接飞书
飞书机器人设置
安装OpenClaw准备工作
初次启动与配置
openclaw使用
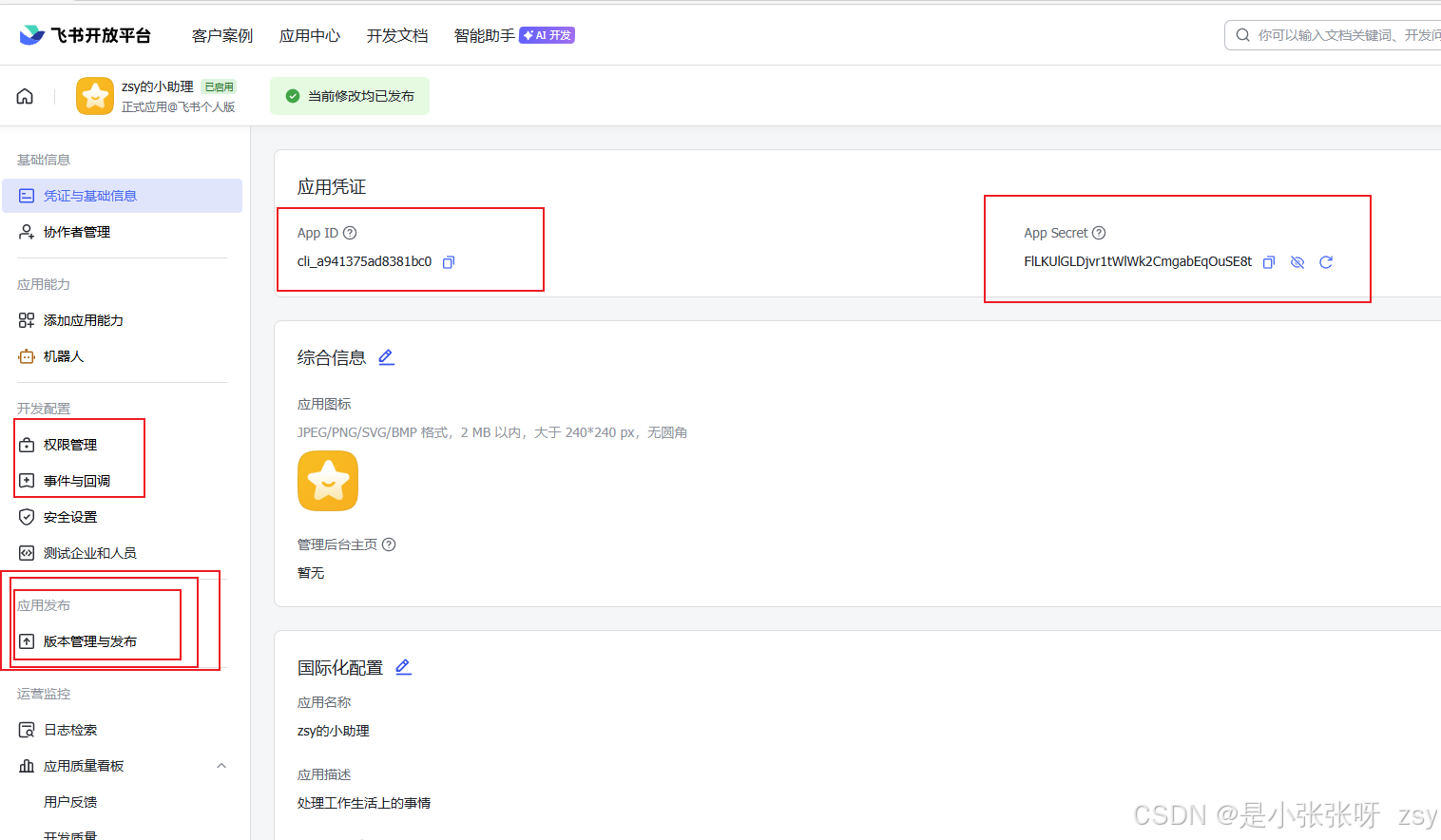
飞书机器人设置------飞书开放平台

1.填写应用名称和描述后进入机器人的基础信息配置,这里面可以看到App ID和APP secret ,这是后面接入openclaw的关键。
2.权限设置要开通,特别是群组和身份认证的,im:。
3.选择事件与回调,这里选择订阅的方式是长链接 ,然后注意要添加事件,事件主要是添加群组和对话的,添加完事件后记得添加回调的,这里的事件和回调不开启会导致机器人没有反应的。
4.最后一定一定一定要发布版本!
至少需要开通这些权限


每次修改完权限或者事件都要重新发布,创建版本就可以了。如果出现配置没有生效就检查是否创建成功。

安装OpenClaw准备工作
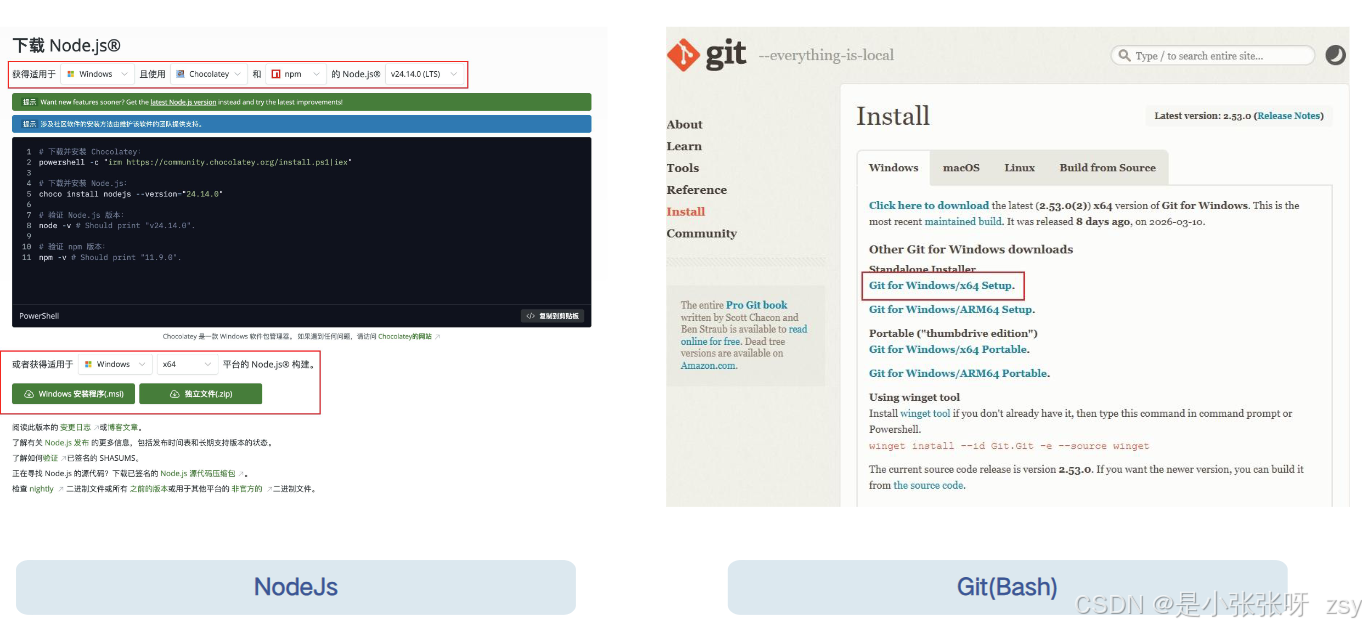
在安装 OpenClaw 之前,需要先完成一些基础环境的准备工作。
OpenClaw 的运行依赖于 Node.js 环境,因为 OpenClaw 在安装和运行过程中需要使用 npm 来下载项目依赖并运行相关脚本。在正式安装 OpenClaw 之前,需要先在电脑上安装 Node.js,并确保 npm 可以正常使用。
此外,还需要安装 Git 用于克隆项目代码,并保证网络可以正常访问相关依赖仓库。完成以上准备工作后,才能顺利进行 OpenClaw 的安装和部署。
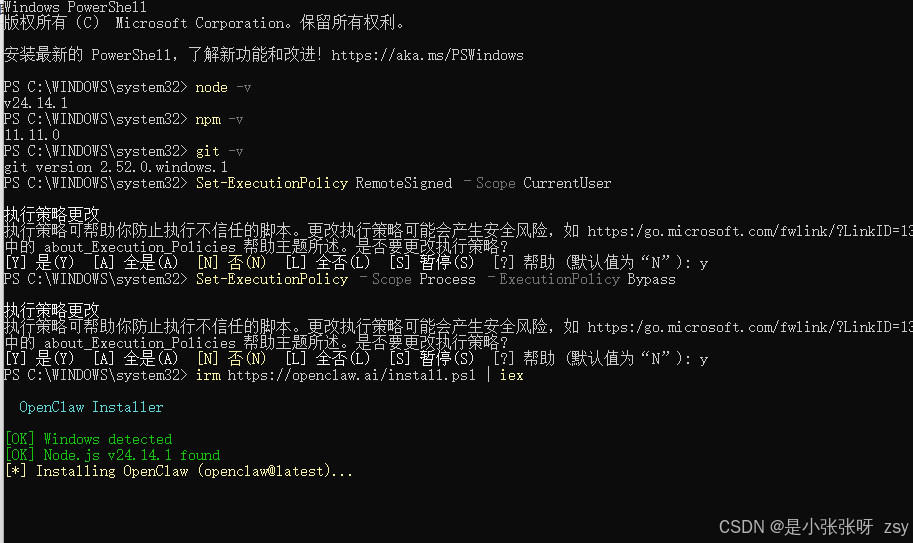
验证
以管理员的身份运行powershell
安装检查:
node -v / npm -v / git -v
权限设置:
Set-ExecutionPolicy RemoteSigned --Scope CurrentUser
Set-ExecutionPolicy --Scope Process --ExecutionPolicy Bypass
安装openclaw:
irm https://openclaw.ai/install.ps1 | iexSet-ExecutionPolicy RemoteSigned --Scope CurrentUser 是将 PowerShell 的执行策略设置为当前用户级别允许运行本地脚本(下载的脚本需要签名),用于解除系统默认禁止运行脚本的限制;
Set-ExecutionPolicy --Scope Process --ExecutionPolicy Bypass 是只对当前 PowerShell 会话临时绕过执行策略限制,允许脚本不受限制运行,关闭当前 PowerShell 窗口后该设置失效。这两个命令通常一起使用,用于在安装软件(如 OpenClaw)前允许 PowerShell 执行安装脚本。
初次启动与配置
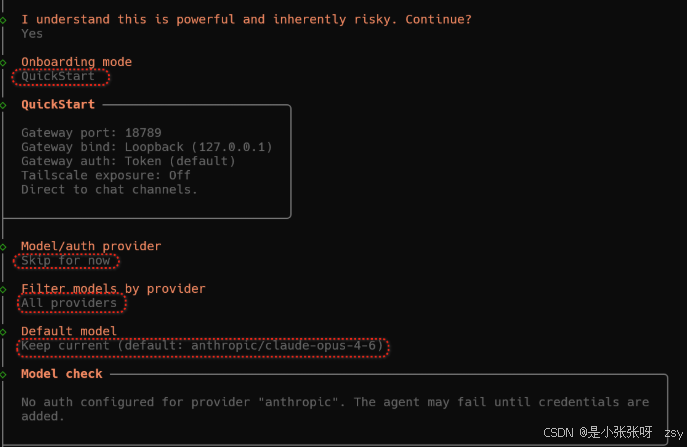
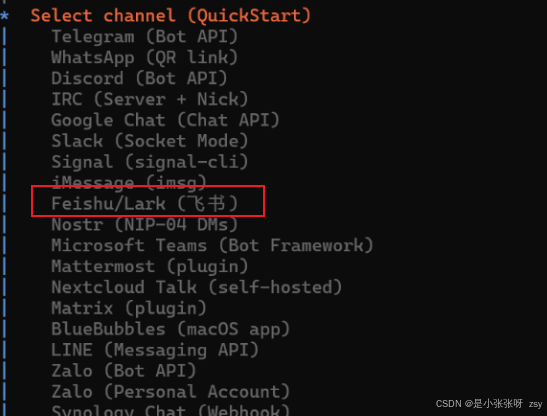
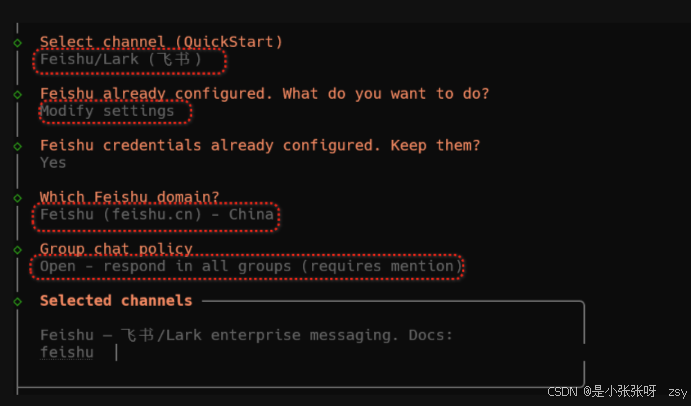
Channel 选择,默认集成的都是国外的平台,这里接入飞书
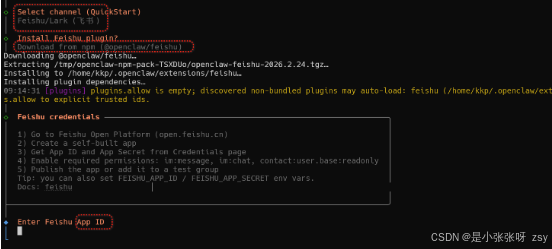
输入飞书机器人的APP secret和App ID
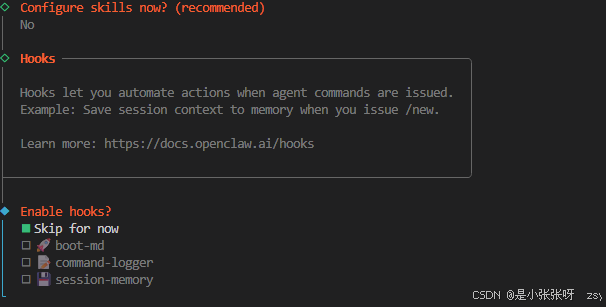
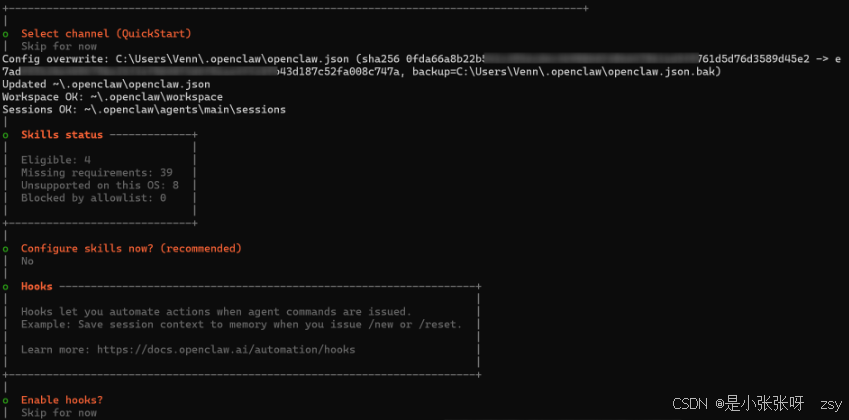
Skill 和 Hooks 先跳过,暂时先不配置:
openclaw默认提供了很多的skills可以先配置,hooks是一个可扩展的事件驱动系统,它可以通过cli命令管理脚本。
然后选择Web Ui打开:
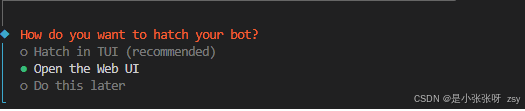
随后会在浏览器打开 http://127.0.0.1:18789
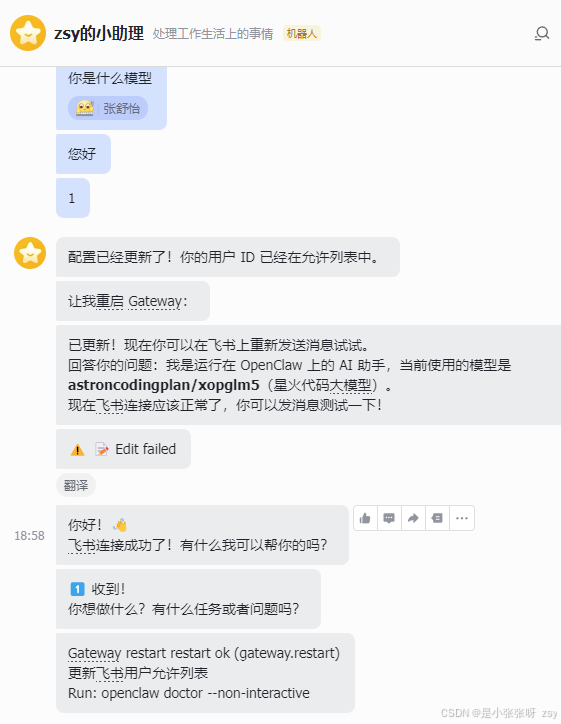
openclaw使用
此时,与openclaw交互会出现
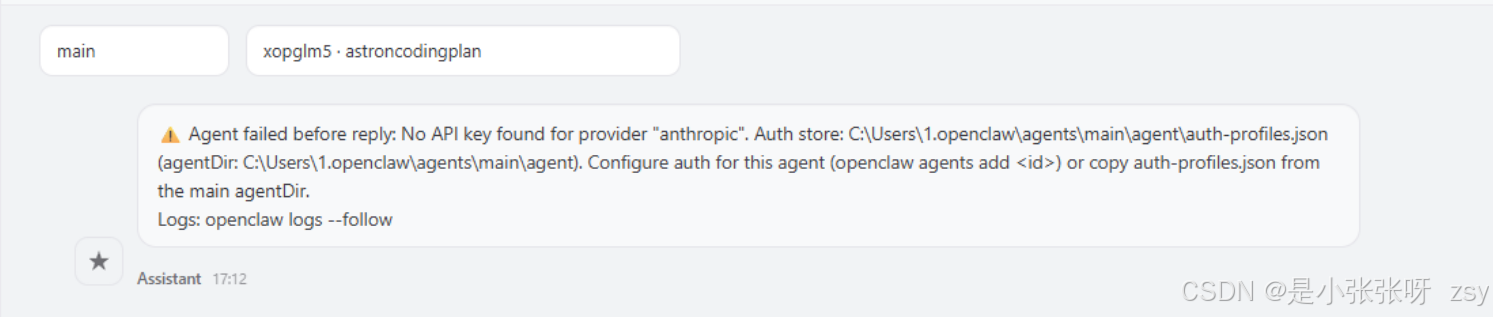
这是因为agent 启动了,但在调用 anthropic 提供商时,没有找到对应的 API key,所以在回复前就失败了。
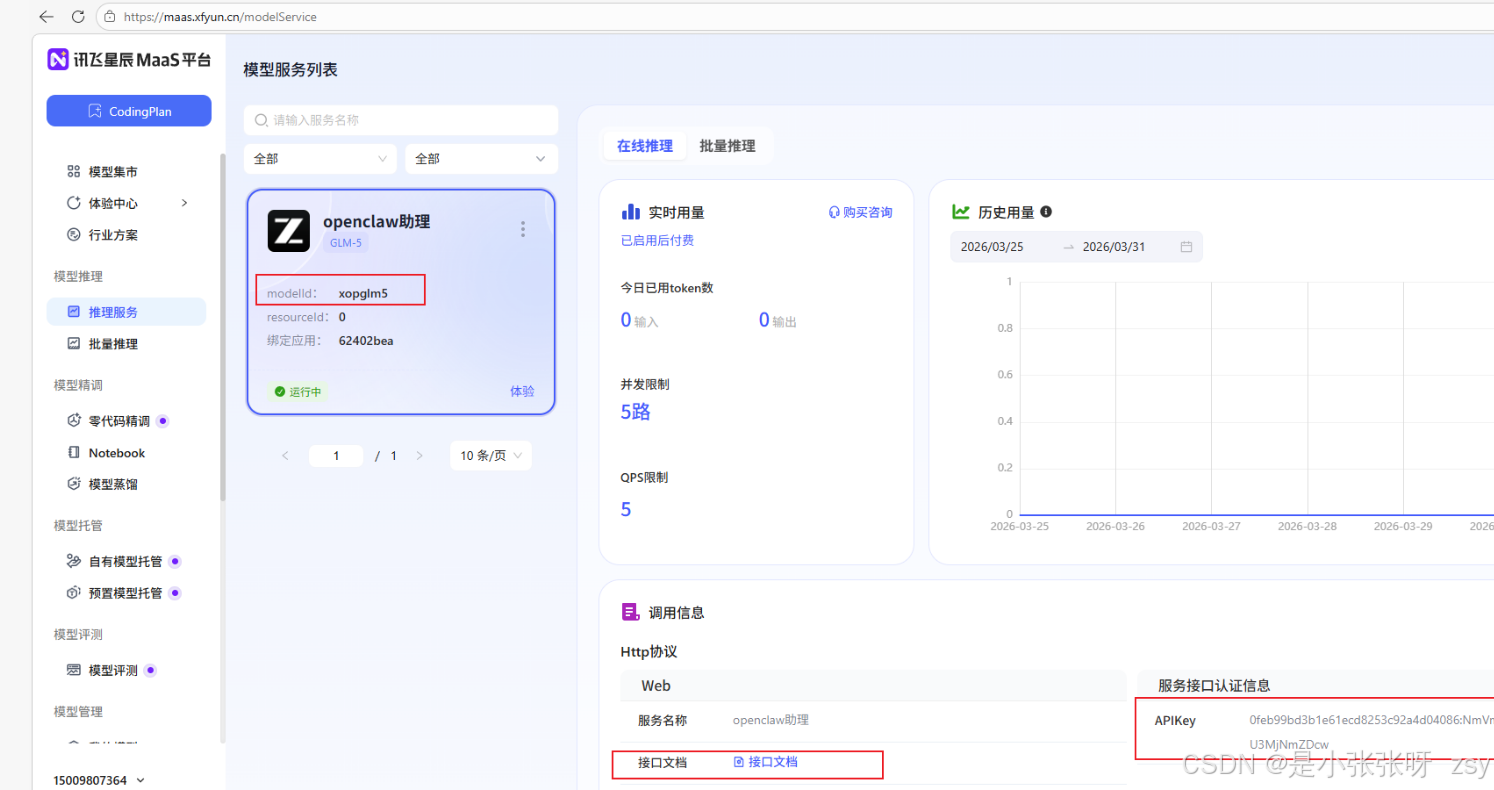
大家可以自行选择模型,我是在讯飞Mass平台。


确定后就能看到modelId以及APIKey以及接口文档,往下滑,有openclaw的配置信息。
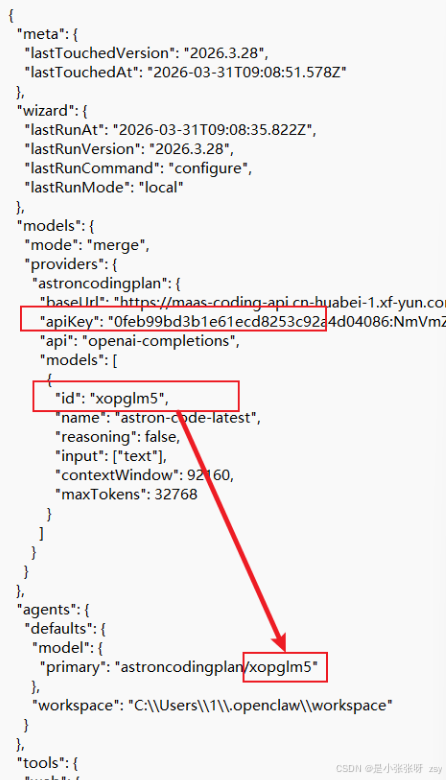
接着找到openclaw.json,更改配置
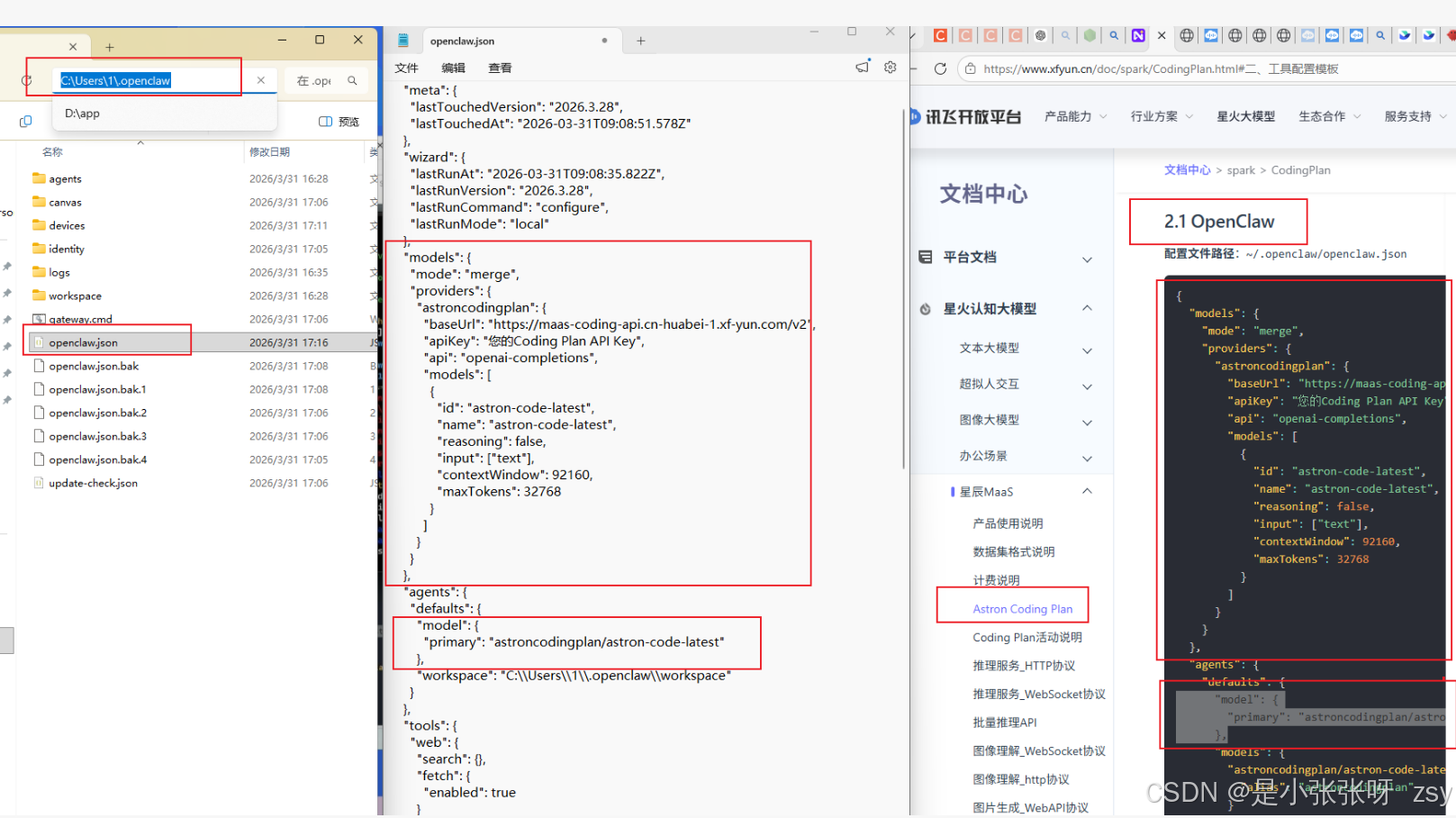
更改model_id以及apiKey
重新启动,就可以了
openclaw gateway restaet
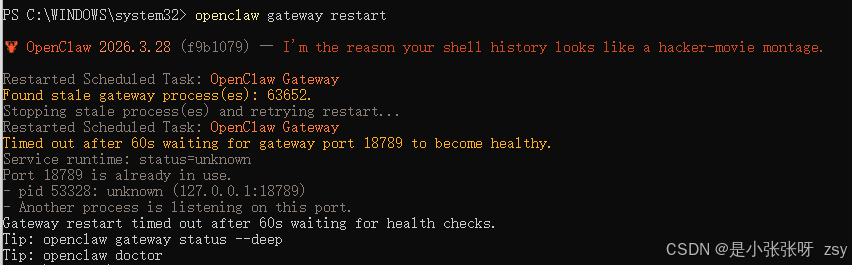
最后就可以打开自己的飞书助理啦!