在航天在轨作业场景中,漂浮基空间机械臂是对接、抓取、维修任务的核心执行机构;与地面机械臂不同,漂浮基座无固定约束,基座与机械臂存在强动力学耦合,控制难度更高。本文基于 Matlab 搭建3 自由度漂浮基机械臂仿真模型,完整实现:三段多项式平滑轨迹规划、PD 闭环力矩控制、动力学数值求解、2D 实时动画可视化;包含全套原理公式、代码逻辑、仿真结果。在航天在轨作业场景中,漂浮基空间机械臂是对接、抓取、维修任务的核心执行机构;与地面机械臂不同,漂浮基座无固定约束,基座与机械臂存在强动力学耦合,控制难度更高。本文基于 Matlab 搭建3 自由度漂浮基机械臂仿真模型,完整实现:三段多项式平滑轨迹规划、PD 闭环力矩控制、动力学数值求解、2D 实时动画可视化;包含全套原理公式、代码逻辑、仿真结果。
- 动力学模型构建
漂浮基座:平面内 3 个运动自由度(X 向平动、Y 向平动、偏角旋转ψ)
作业机械臂:串联 3 转动关节q1,q2,q3
状态量:

在轨微重力环境忽略重力项,漂浮机械臂标准动力学方程如下:

太空漂浮基基座完全自由、无外力锚定,机械臂任意关节运动产生的连杆惯性力、科氏力、离心力都会全额反推基座,造成基座漂移/姿态偏转,整个漂浮系统仅存在内力耦合,无外部重力/地基约束力:
连杆加速/减速,产生惯性力FI,根据作用力与反作用力:连杆动→必反向推基座:
二、PD控制
偏差:
控制率:
基座纠偏力:
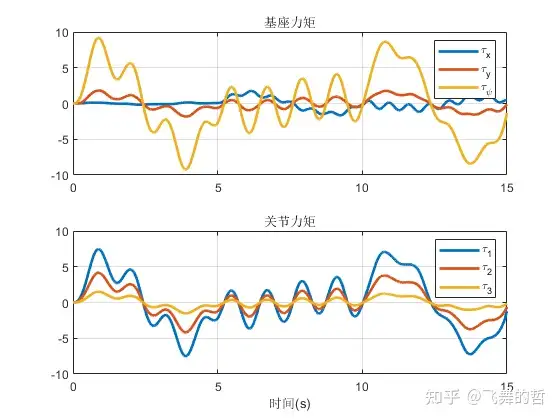
第一段:只动基座角度 → 手臂不动,无反力
第二段:只动基座 XY → 手臂不动,无反力
第三段:只动手臂 → 基座已经到位,PD 平稳抵消反力
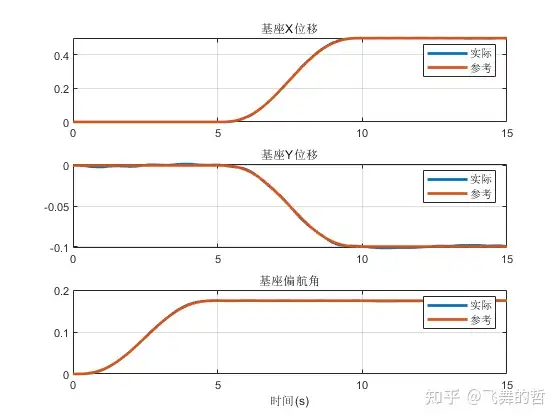
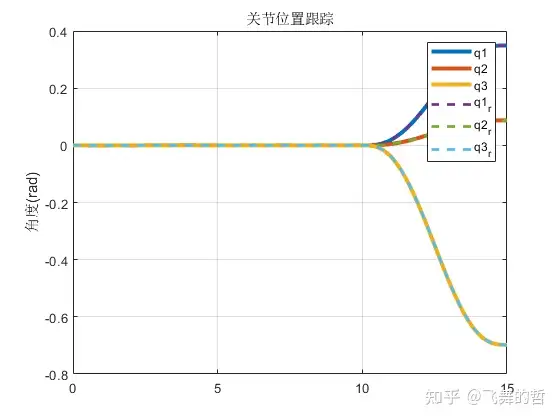
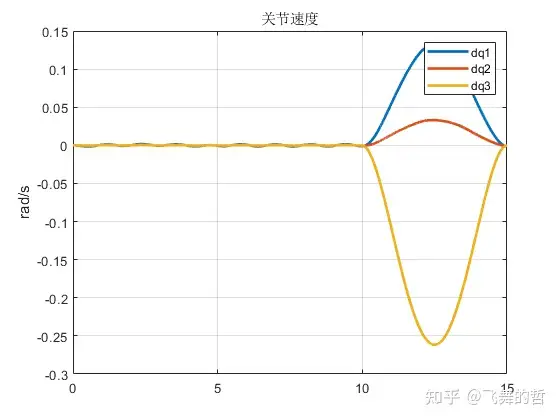
三、效果如下:
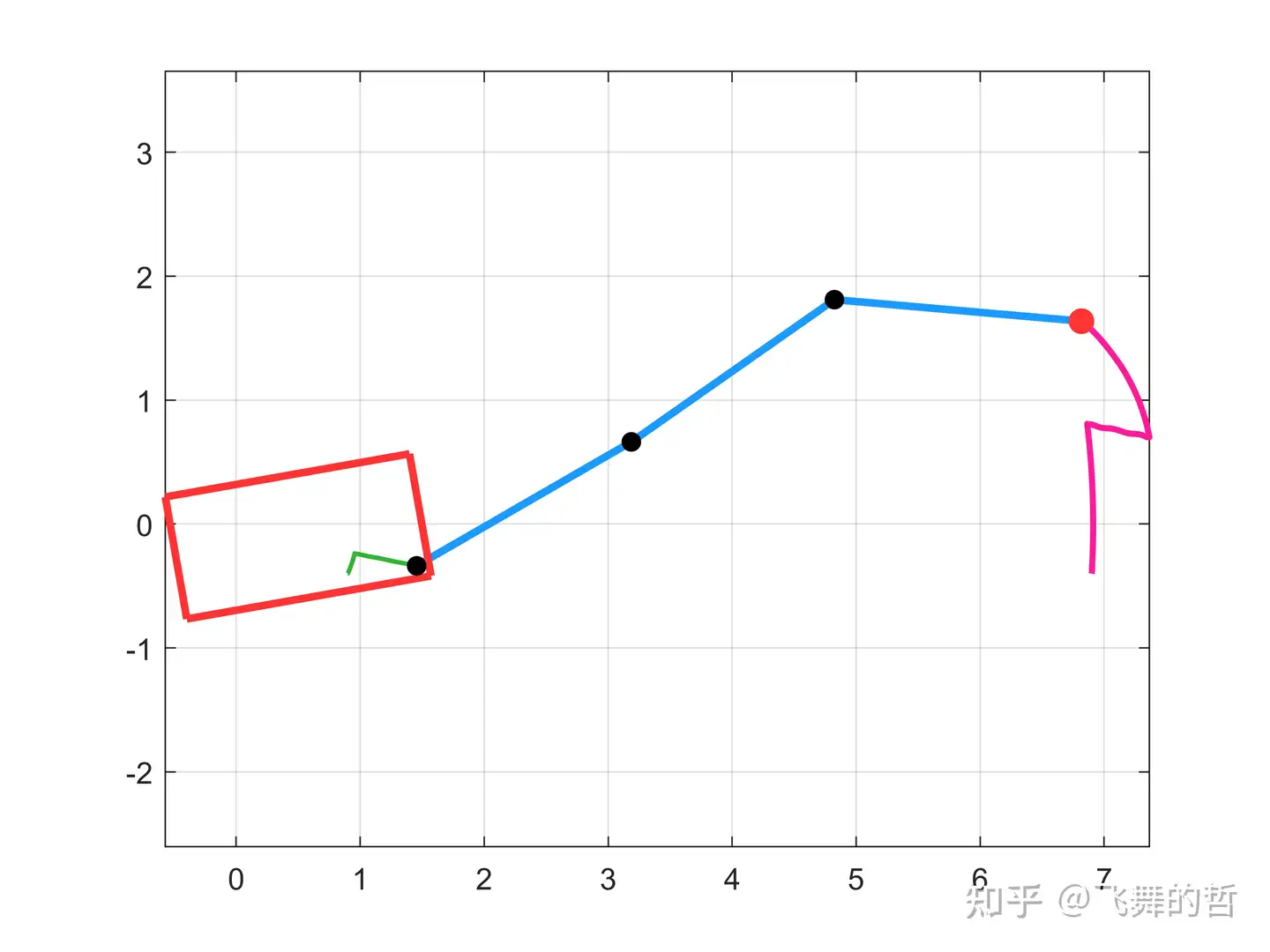
视频效果如下:
作者简介:长期从事机器人/控制/规划/数学建模领域相关研究,涉及机械臂、轮式机器人、四足机器人、移动机械臂、轮足、机械双臂的建模及控制仿真。 接机器人/控制/规划领域毕业论文辅导 无论你是想入门避障、轨迹规划、轨迹优化、机械臂协同、人机协作、机器人轨迹跟踪,还是完全看不懂文献、对未来比较迷茫或者找工作不知如何下手,我都能提供专业建议,助你少走弯路。高效完成科研。 欢迎交流、讨论,3531225003@qq.com