工程文件:
通过网盘分享的文件:new.zip
链接: https://pan.baidu.com/s/1Uw_h1k_UWVCCZXFsJDLU8Q?pwd=xcy5 提取码: xcy5
at24c04介绍:
存储容量:4 Kbits(即 512 字节)。内部结构为 32 页,每页 16 字节。地址0x000-0x1FF
通信接口:标准 I2C(时钟线 SCL 和数据线 SDA),支持最高 400 kHz 的快速模式。
想要访问512字节的地址,需要9个二进制,但是单片机最大只能8位。设计者,把512字节的存储空间分成两个数据块,每个块256字节。从i2c的设备地址借走一个位,用来当做数据块的选择开关。
AT24C04 的 8 位 I2C 设备寻址格式: 1 0 1 0 A2 A1 P0 R/W
-
1 0 1 0:EEPROM 的固定前缀。 -
A2, A1:由芯片外部的硬件引脚高低电平决定(注意:AT24C04 的 A0 引脚在内部是悬空的,不起作用)。 -
P0(Page 0) :这就是借来的"第 9 位地址"!也叫块选择位。 -
R/W:读写方向位。
第一块(Block 0):存储地址 0x00 ~ 0xFF (前 256 字节)
-
你需要把设备地址里的
P0设为0。 -
此时 I2C 设备地址是:
1010 000 0->0xA0。 -
内部字地址正常发送
0x00~0xFF。
第二块(Block 1):存储地址 0x100 ~ 0x1FF (后 256 字节)
-
你需要把设备地址里的
P0设为1。 -
此时 I2C 设备地址变成了:
1010 001 0->0xA2。 -
内部字地址依然发送
0x00~0xFF,但芯片知道你要操作的是后半区。
at24c04由于设计与压缩成本的问题,会产生卷回操作。
存储芯片并不是一个连续的、毫无边界的巨大黑板。在微观晶体管层面,它被划分成了一排一排的独立单元,每一排被称为一个页。比如一页是 8 字节或 16 字节。 之所以这样设计,是因为把数据永久"烧录"进存储单元需要极高的瞬间电压,而芯片内部的高压电荷泵,一次只能对齐并作用于同一页的物理线路。
为了提高烧录(5ms)的速度,加入了一个临时缓存区(托盘),这个托盘大小等于一个物理页大小(at24c02是8字节,04是16字节)。
数据流向:数据------托盘------存储区。当托盘存满16个字节,还继续给托盘发数据,这时候托盘不会进行换页操作,直接把托盘的最低位数据进行覆盖。
比如:当你的单片机执行 rt_i2c_master_send ()时,它在 I2C 总线上发送: [START] -> [设备地址] -> [内部存储地址] -> [数据1] -> [数据2] ...[STOP]。这时候数据都会被存入托盘中,容易造成数据覆盖。
最标准且高效的修复方法是在软件驱动层引入**"自动分页写入算法**",通过智能切分数据包来迁就硬件的机制。在每次发起通信前,程序会先计算目标地址距离当前物理页的结尾还剩多少空余位置;如果待写入的数据总量大于这些空位,程序只会发送刚好能填满当前页的数据,随后立即停止 I2C 通信并强制延时(通常 5 毫秒)等待芯片安全烧录,待烧录彻底完成后,再将地址光标对齐到下一物理页的绝对开头继续发送剩余数据,利用这种"化整为零、满页即停"的策略即可彻底避开卷回陷阱。
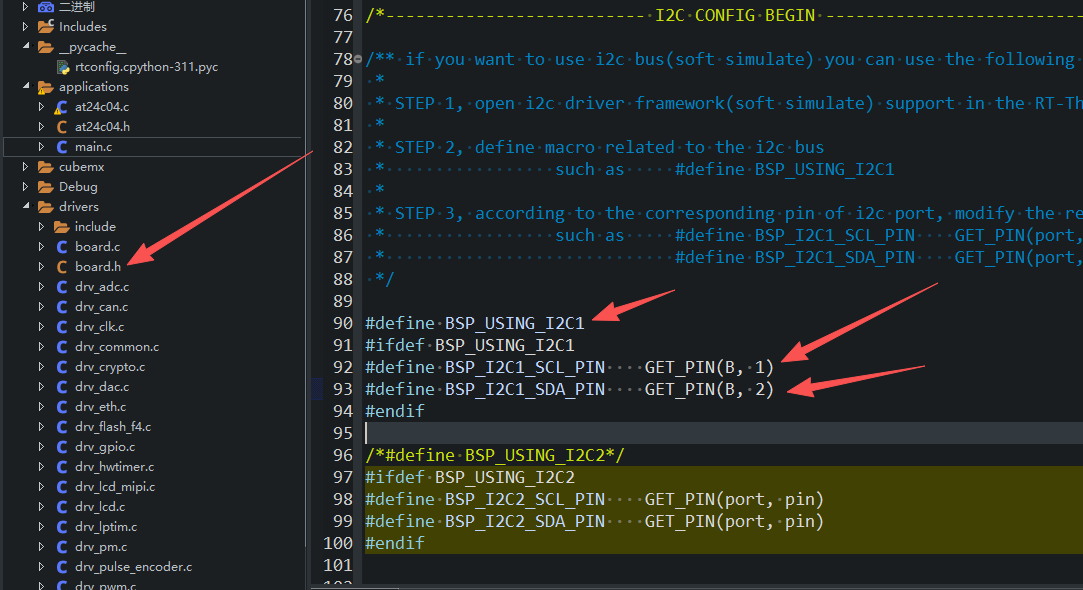
首先在board.h,把注释取消,然后配置软件iic的引脚,pb1跟pb2,采用软件iic。
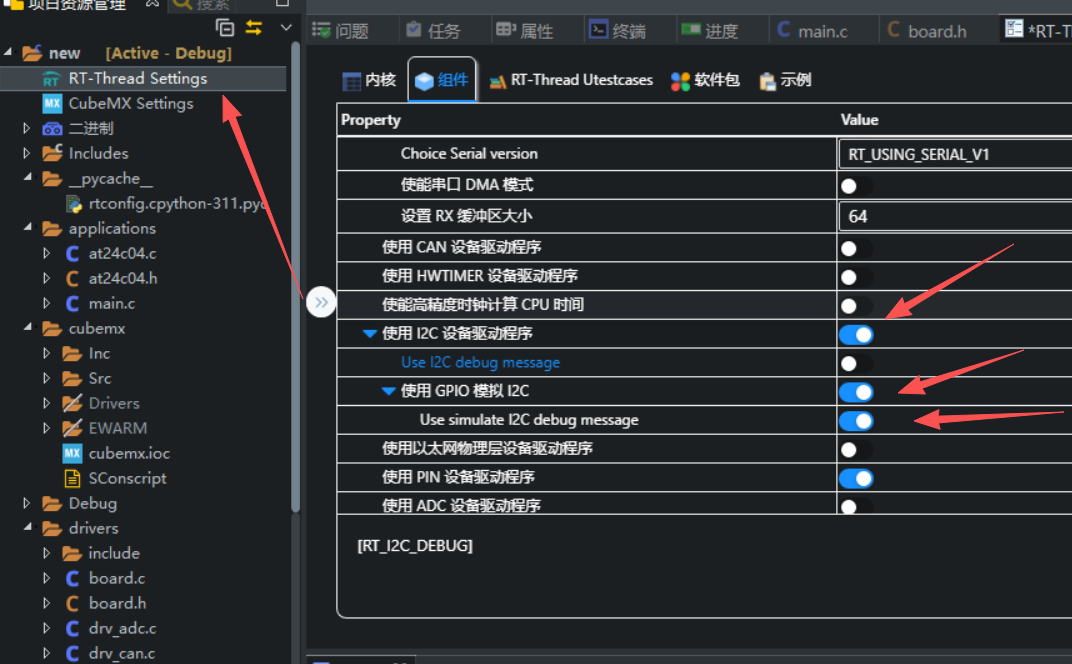
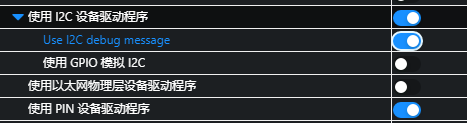
在rt thread settings中设置
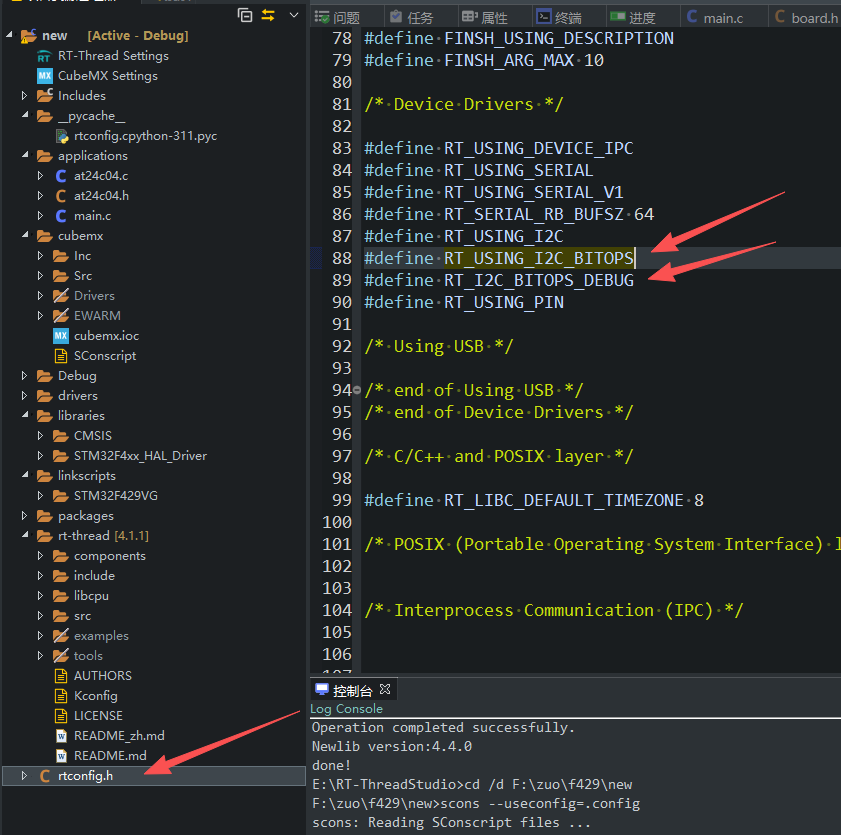
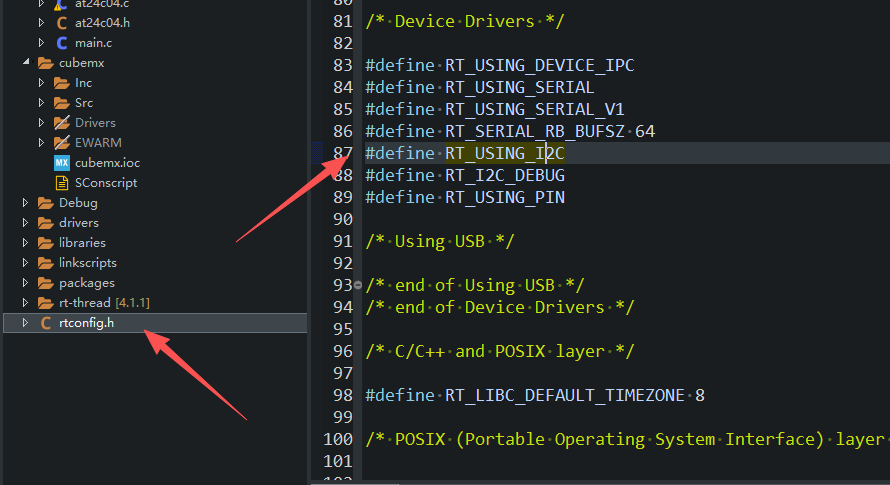
设置之后,会出现这个宏定义
使用i2c设备驱动程序: RT-Thread I2C 总线设备驱动框架的全局总开关,是下面所有功能的前提。自动在rtconfig.h中定义RT_USING_I2C宏,启用 RT-Thread 官方的 I2C 驱动框架;编译器会编译 I2C 核心驱动代码,提供你代码里用到的rt_i2c_master_send、rt_i2c_master_recv、rt_i2c_bus_device_register等核心 API;只有开启这个总开关,下面的硬件 I2C 调试、GPIO 模拟 I2C 的开关才会生效。
**Use I2C debug message:**硬件 I2C 外设的调试日志开关,硬件 I2C 运行时,会在串口自动打印详细运行信息:I2C 总线初始化结果、设备地址是否 ACK 应答、发送 / 接收的字节数、通信超时、NACK 错误等。
使用GPIO模拟i2c: 启用软件模拟 I2C功能,自动定义RT_USING_I2C_BITOPS宏,启用软件模拟 I2C 的核心驱动代码;你可以在board.h里配置任意 GPIO 作为模拟 I2C 的 SCL/SDA,注册成比如"i2c2"的总线设备,和硬件 I2C1 互不影响。
Use simulate I2C debug message: 模拟 I2C 的专属调试日志开关,模拟 I2C 运行时,会打印时序模拟细节、ACK/NACK 检测结果、引脚操作状态、发送接收日志。
at24c04.c
cs
#include "at24c04.h"
#define DBG_TAG "I2C_soft"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
#include <rtthread.h> // 需要引入 rtthread.h 以使用 rt_malloc 和 rt_free
#define I2C1_NAME "i2c1"
#define BASE_SLAVE_ADDR (0xA0 >> 1) // 基础设备地址 0x50
// data_add 为16位数据地址(0x000~0x1FF),data为纯数据指针,data_byte为纯数据长度
int write_i2c1reg(rt_uint16_t data_add, rt_uint8_t *data, rt_uint8_t data_byte)
{
rt_uint8_t i2c1_flag = 0;
struct rt_i2c_bus_device *i2c1_bus;
rt_uint8_t slave_addr;
rt_uint8_t *send_buf;
i2c1_bus = (struct rt_i2c_bus_device *)rt_device_find(I2C1_NAME);
if(i2c1_bus == RT_NULL){
LOG_D("failed to i2c1 bus find");
return -1;
}
// 1. 动态计算设备地址:提取 16位地址 的第 9 位(bit 8),拼接到设备地址中
slave_addr = BASE_SLAVE_ADDR | ((data_add >> 8) & 0x01);
// 2. 动态分配临时缓冲区:长度 = 1字节内部地址 + 实际数据长度
send_buf = (rt_uint8_t *)rt_malloc(data_byte + 1);
if(send_buf == RT_NULL){
LOG_D("failed to malloc send buffer");
return -1;
}
// 3. 组装发送帧:第 0 个字节装入低 8 位内部地址,后面跟上有效数据
send_buf[0] = (rt_uint8_t)(data_add & 0xFF);
for(int i = 0; i < data_byte; i++){
send_buf[i + 1] = data[i];
}
// 4. 发送数据
i2c1_flag = (rt_uint8_t)rt_i2c_master_send(i2c1_bus, slave_addr, RT_NULL, send_buf, data_byte + 1);
// 5. 释放内存
rt_free(send_buf);
if(i2c1_flag != (data_byte + 1)){
LOG_D("failed to i2c1 send");
return -1;
}
return 0;
}
#define AT24C04_PAGE_SIZE 16 // AT24C04 的页大小是 16 字节
/**
* @brief AT24C04 自动分页写入函数 (防卷回高级封装)
* @param addr: 16位目标物理起始地址 (0x000 ~ 0x1FF)
* @param data: 要写入的数据缓冲区指针
* @param len: 要写入的总字节数 (支持任意长度,如 20、50、100 字节)
* @retval 0:成功, -1:失败
*/
int at24c04_page_write(rt_uint16_t addr, rt_uint8_t *data, rt_uint16_t len)
{
rt_uint16_t page_offset;
rt_uint16_t space_left_in_page;
rt_uint16_t chunk_size;
while (len > 0)
{
// 1. 计算当前地址在物理页内的偏移量 (例如 addr = 0x05,偏移量就是 5)
page_offset = addr % AT24C04_PAGE_SIZE;
// 2. 计算当前物理页还剩下多少个空位
space_left_in_page = AT24C04_PAGE_SIZE - page_offset;
// 3. 决定这一次要写入的数据块大小 (Chunk)
// 如果剩下要写的数据量 < 页内剩余空间,就全写进去;否则,只填满当前页。
if (len < space_left_in_page)
{
chunk_size = len;
}
else
{
chunk_size = space_left_in_page;
}
// 4. 调用底层的 I2C 发送函数,只发送这个计算好的 chunk_size
if (write_i2c1reg(addr, data, (rt_uint8_t)chunk_size) != 0)
{
LOG_E("Page write failed at addr: 0x%03X", addr);
return -1;
}
// 5. 【极其关键】等待当前这半页或一页的数据固化到 Flash!
rt_thread_mdelay(5);
// 6. 更新指针和剩余长度,准备下一轮循环 (如果还没写完的话)
addr += chunk_size; // 目标地址往后推
data += chunk_size; // 数据缓冲区指针往后推
len -= chunk_size; // 剩余需要写入的长度减少
}
return 0;
}
// data_add 为16位数据地址(0x000~0x1FF),data为接收缓冲区,data_byte为读取长度
int read_i2c1reg(rt_uint16_t data_add, rt_uint8_t *data, rt_uint8_t data_byte)
{
rt_uint8_t i2c1_flag = 0;
struct rt_i2c_bus_device *i2c1_bus;
rt_uint8_t slave_addr;
rt_uint8_t word_addr;
i2c1_bus = (struct rt_i2c_bus_device *)rt_device_find(I2C1_NAME);
if(i2c1_bus == RT_NULL){
LOG_D("failed to i2c1 bus find");
return -1;
}
// 1. 动态计算设备地址:提取第 9 位
slave_addr = BASE_SLAVE_ADDR | ((data_add >> 8) & 0x01);
// 2. 提取低 8 位内部地址
word_addr = (rt_uint8_t)(data_add & 0xFF);
// 3. 伪写操作:发送低 8 位内部地址定位光标
rt_i2c_master_send(i2c1_bus, slave_addr, RT_NULL, &word_addr, 1);
// 4. 连续读取操作
i2c1_flag = (rt_uint8_t)rt_i2c_master_recv(i2c1_bus, slave_addr, RT_NULL, data, data_byte);
if(i2c1_flag != data_byte){
LOG_D("failed to i2c1 recv");
return -1;
}
return 0;
}at24c04.h
#ifndef __AT24C04_H__
#define __AT24C04_H__
#include <rtthread.h>
/* ==========================================
* AT24C04 硬件参数宏定义 (供上层应用参考)
* ========================================== */
#define AT24C04_PAGE_SIZE 16 // AT24C04 的物理页大小为 16 字节
#define AT24C04_TOTAL_SIZE 512 // AT24C04 总容量为 512 字节
#define AT24C04_ADDR_MIN 0x000 // 最小存储地址
#define AT24C04_ADDR_MAX 0x1FF // 最大存储地址
/* ==========================================
* 函数声明
* ========================================== */
/**
* @brief 向 AT24C04 写入数据 (当前版本暂未包含跨页/卷回保护)
* @param data_add: 16位目标物理地址 (范围: 0x000 ~ 0x1FF)
* @param data: 要写入的纯数据缓冲区指针
* @param data_byte: 准备写入的字节总数
* @retval 0:成功, -1:失败
*/
int write_i2c1reg(rt_uint16_t data_add, rt_uint8_t *data, rt_uint8_t data_byte);
/**
* @brief 从 AT24C04 连续读取数据 (硬件支持自动跨块/跨页读取)
* @param data_add: 16位目标物理起始地址 (范围: 0x000 ~ 0x1FF)
* @param data: 用于存放读回数据的接收缓冲区指针
* @param data_byte: 准备读取的字节总数
* @retval 0:成功, -1:失败
*/
int read_i2c1reg(rt_uint16_t data_add, rt_uint8_t *data, rt_uint8_t data_byte);
/**
* @brief AT24C04 自动分页写入函数 (防卷回高级封装)
* @param addr: 16位目标物理起始地址 (0x000 ~ 0x1FF)
* @param data: 要写入的数据缓冲区指针
* @param len: 要写入的总字节数 (支持任意长度,如 20、50、100 字节)
* @retval 0:成功, -1:失败
*/
int at24c04_page_write(rt_uint16_t addr, rt_uint8_t *data, rt_uint16_t len);
#endif /* __AT24C04_H__ */代码详解
1:对slave_addr = BASE_SLAVE_ADDR | ((data_add >> 8) & 0x01)详细解析
-
I2C 限制:I2C 协议每次发"内部地址"只能发 8 个 bit。
-
AT24C04 的办法:芯片规定,那多出来的第 9 位(最高位),不要放在内部地址里发,而是塞进 I2C 的设备地址的最末尾发过来。
-
访问前半段(地址 0~255),最高位是 0,设备地址用
0x50。 -
访问后半段(地址 256~511),最高位是 1,设备地址用
0x51。
-
场景 A:你想访问地址 0x05(在前半段 Block 0)
data_add 的值是 0x0005,二进制是:0000 0000 0000 0101。
-
第一步:右移 8 位
(data_add >> 8)把二进制整体向右移动 8 个格子。 原数:0000 0000 0000 0101移位后:0000 0000 0000 0000目的:把高 8 位推到了低 8 位的位置,我们真正需要的那"第 9 位"现在来到了最低位(bit 0)。 -
第二步:按位与
& 0x010x01的二进制是0000 0001。任何数和1做与运算保持原样,和0做与运算变成0。 计算:0000 0000 & 0000 0001=0。 目的:屏蔽掉其他所有干扰位,只干干净净地保留最低位。此时结果为0。 -
第三步:按位或
BASE_SLAVE_ADDR | ...把0x50(101 0000)和刚才的结果0进行或运算。 计算:101 0000 | 0000 0000=101 0000(即0x50)。 结论:算出的设备地址是0x50,芯片知道你要操作前半区。
场景 B:你想访问地址 0x105(在后半段 Block 1)
data_add 的值是 0x0105(即十进制的 261),二进制是:0000 0001 0000 0101。 (注意看,第 9 位是 1)
-
第一步:右移 8 位
(data_add >> 8)原数:0000 0001 0000 0101移位后:0000 0000 0000 0001那关键的"第 9 位"被移到了最右边。 -
第二步:按位与
& 0x01计算:0000 0001 & 0000 0001=1。 成功提取出了块选标志位1。 -
第三步:按位或
BASE_SLAVE_ADDR | ...把0x50(101 0000)和1(0000 0001)进行或运算。 计算:101 0000 | 0000 0001=101 0001(即0x51)。 结论:算出的设备地址变成了0x51,完美通知芯片切换到后半区!
2:send_buf = (rt_uint8_t *)rt_malloc(data_byte + 1);详细解释
rt_malloc:该函数将从内存堆上分配用户指定大小的内存块。
rt_i2c_master_send():该函数的api调用,只接受数据首地址指针,然后发送连续数据流。但是有效数据data与data_add存储地址,他们在单片机的内存存储区域是分离的,这时候我们需要把两者进行结合。
3:rt_i2c_master_send(i2c1_bus, slave_addr, RT_NULL, &word_addr, 1);详细解释
在 AT24C04 芯片内部,有一个专门的硬件寄存器,叫做内部数据地址指针。你可以把它想象成电脑屏幕上闪烁的光标。芯片不管读还是写,都只能在这个指针当前指向的位置进行。
word_addr是8位地址数据。
在at24c04中,只要是一次全新的写通信,收到的第 1 个字节,绝对是目标地址,必须把它装进的内部数据地址指针里。这时直接定位到该地址下。
4:rt_i2c_master_send(struct rt_i2c_bus_device *bus, rt_uint16_t addr, rt_uint16_t flags, const rt_uint8_t *buf, rt_uint32_t count);
|-------|-----------------------------------------------------------|
| bus | I2C 总线设备句柄 |
| addr | I2C 从设备地址 |
| flags | 标志位,可为上文提到的除 RT_I2C_WR RT_I2C_RD之外的其他标志位,可以进行 "|" 操作 |
| buf | 待发送数据缓冲区 |
| count | 待发送数据大小(单位:字节) |
|-----------|--------|
| 返回 | ------ |
| 消息数组的元素个数 | 成功 |
| 错误码 | 失败 |
5:rt_size_t rt_i2c_master_recv(struct rt_i2c_bus_device *bus, rt_uint16_t addr, rt_uint16_t flags, rt_uint8_t *buf, rt_uint32_t count);
|-----------|-----------------------------------------------------------|
| bus | I2C 总线设备句柄 |
| addr | I2C 从设备地址 |
| flags | 标志位,可为上文提到的除 RT_I2C_WR RT_I2C_RD之外的其他标志位,可以进行 "|" 操作 |
| buf | 数据缓冲区 |
| count | 缓冲区大小(单位:字节,要大于等于最大接收到的数据长度) |
| 返回 | ------ |
| 消息数组的元素个数 | 成功 |
| 错误码 | 失败 |
6:at24c04_page_write 自动分页算法
假设你要写入 20 个字节,不同的起始地址会导致不同的切分策略:
场景 A:从页的首地址开始写(例如 addr = 0x0100)
-
第一轮循环:
-
偏移量是
0x0100 % 16 = 0。 -
页内剩余空间是
16 - 0 = 16。 -
你要写 20 个字节,大于 16,所以本次只能写 16 字节。
-
底层发送 16 字节,然后延时 5ms。
-
更新状态:地址变成
0x0110,剩余要写4字节。
-
-
第二轮循环:
-
偏移量是
0x0110 % 16 = 0。 -
页内剩余空间是 16。
-
你还剩 4 个字节,小于 16。所以本次将剩下的 4 字节一次性写入。
-
延时 5ms,结束。
-
结果:20 字节被切分成了 16 + 4 两次发送,完美避开卷回。
-
场景 B:从页的中间开始写(例如 addr = 0x0105)
-
第一轮循环:
-
偏移量是
0x0105 % 16 = 5。 -
页内剩余空间是
16 - 5 = 11。 -
要写 20 字节,大于 11。所以先把当前页填满,写 11 字节 (一直写到
0x010F边界)。 -
延时 5ms。
-
更新状态:地址变成
0x0110(精准落入下一页开头),剩余9字节。
-
-
第二轮循环:
-
偏移量是
0,剩余空间是 16。 -
要写 9 字节,全部写入。
-
延时 5ms,结束。
-
结果:20 字节被切分成了 11 + 9 两次发送,完美避开卷回。
-
main.c
cs
#include <rtthread.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
// 引入我们刚才写好的 AT24C04 驱动头文件
#include "at24c04.h"
int main(void)
{
// 1. 准备要写入的测试数据 (5个字节)
rt_uint8_t write_buf[20] = {
0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A,
0x0B, 0x0C, 0x0D, 0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14
};
// 2. 准备接收缓冲区 (注意:长度必须大于等于要读取的长度,这里设为 5)
rt_uint8_t read_buf[20] = {0};
// 3. 设定测试的物理地址
// 我们故意选 0x105 (十进制的 261),测试底层驱动是否能自动切换到设备地址 0x51
rt_uint16_t test_addr = 0x0105;
LOG_D("=== AT24C04 Read/Write Test Start ===");
// --------------------------------------------------------
// 第一步:执行写入操作
// --------------------------------------------------------
LOG_D("Writing 5 bytes to address 0x%03X...", test_addr);
//write_i2c1reg(test_addr, write_buf, 20)
at24c04_page_write(test_addr, write_buf, 20);
// 【极度重要】每次写完必须延时!留给 EEPROM 内部 5ms 的 Flash 烧写时间。
// 这里给 50ms 比较宽裕,保证绝对稳定。
rt_thread_mdelay(50);
// --------------------------------------------------------
// 第二步:执行读取操作
// --------------------------------------------------------
LOG_D("Reading 5 bytes from address 0x%03X...", test_addr);
if (read_i2c1reg(test_addr, read_buf, 20) == 0)
{
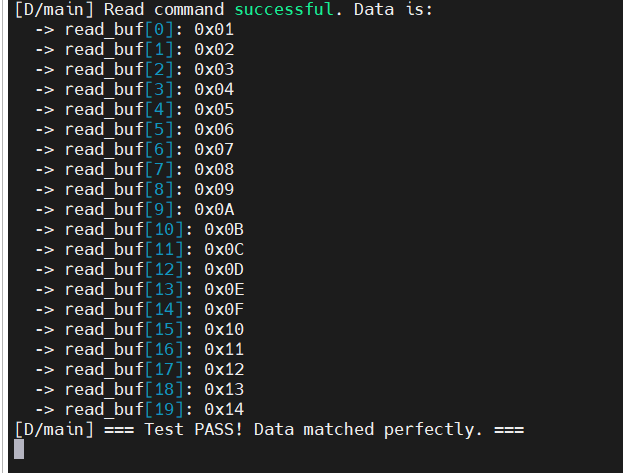
LOG_D("Read command successful. Data is:");
// 将读回来的数据打印到串口终端
for(int i = 0; i < 20; i++)
{
rt_kprintf(" -> read_buf[%d]: 0x%02X\n", i, read_buf[i]);
}
}
else
{
LOG_E("Read command failed!");
}
// --------------------------------------------------------
// 第三步:数据自动校验
// --------------------------------------------------------
int is_match = 1;
for(int i = 0; i < 20; i++)
{
if(write_buf[i] != read_buf[i])
{
is_match = 0;
break; // 只要有一个字节对不上,就判为失败
}
}
if(is_match)
{
LOG_D("=== Test PASS! Data matched perfectly. ===");
}
else
{
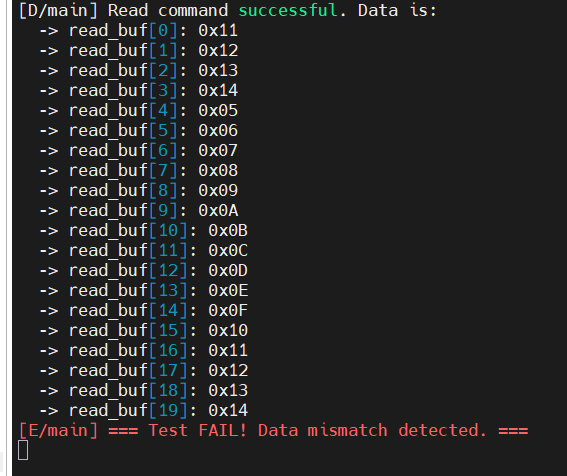
LOG_E("=== Test FAIL! Data mismatch detected. ===");
}
// --------------------------------------------------------
// 第四步:线程挂起 (RTOS 规范)
// --------------------------------------------------------
// main 本质上也是一个线程,不能让它执行完退出。
// 用死循环配合延时,交出 CPU 控制权给其他任务。
while (1)
{
rt_thread_mdelay(1000);
}
return RT_EOK;
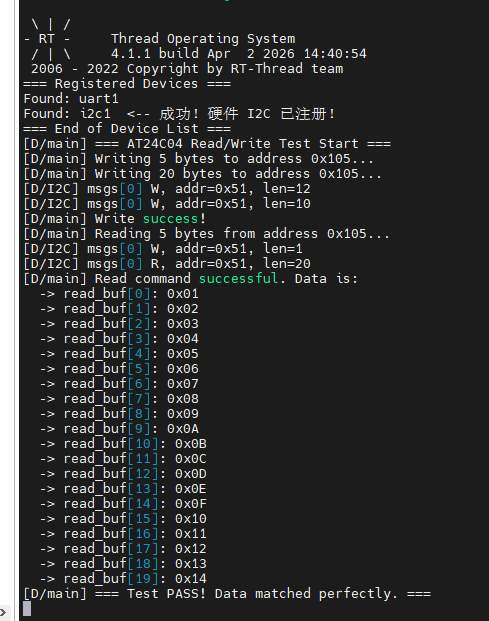
}采用了自动分页算法
没采用自动分页,前4个数据会被覆盖。
如果我现在要使用硬件iic如何操作:
关闭软件iic
进入cubemx里面配置iic
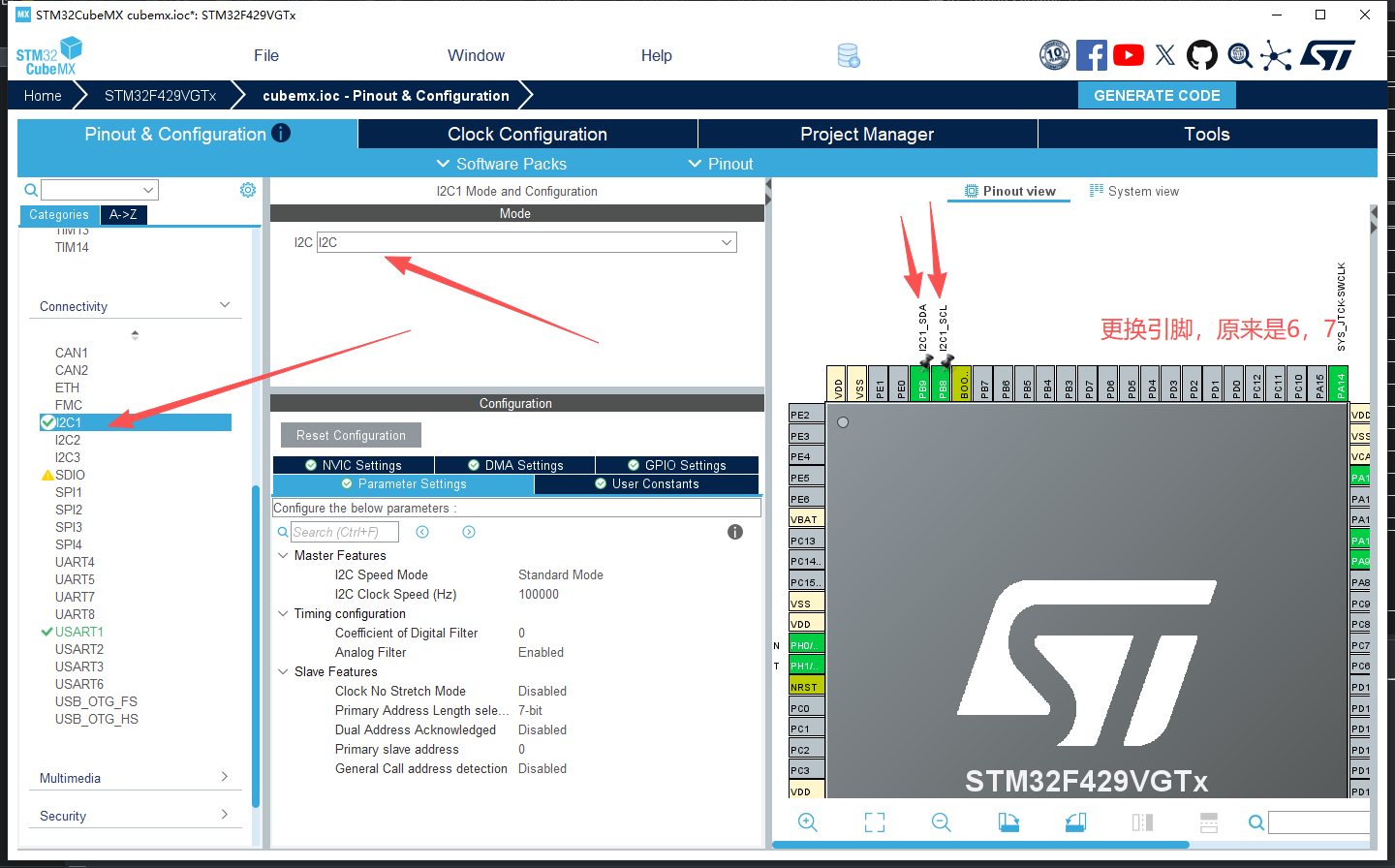
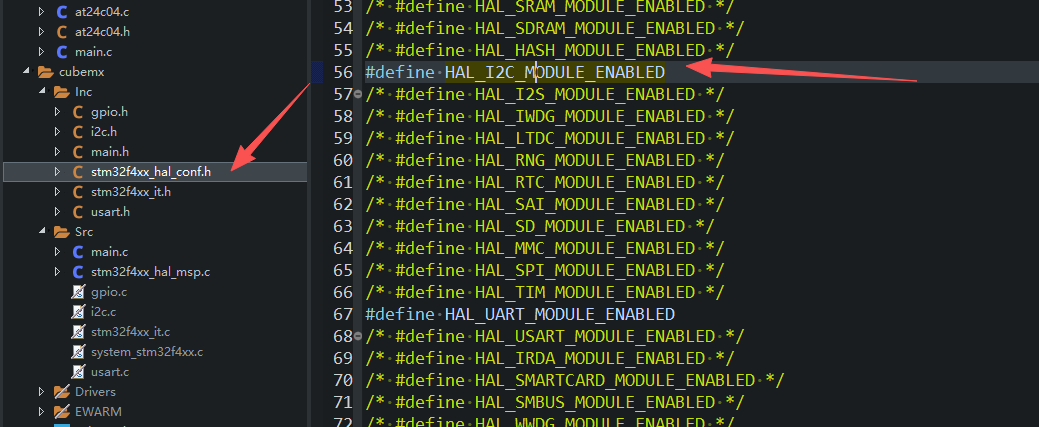
配置成功之后会:自动取消注释
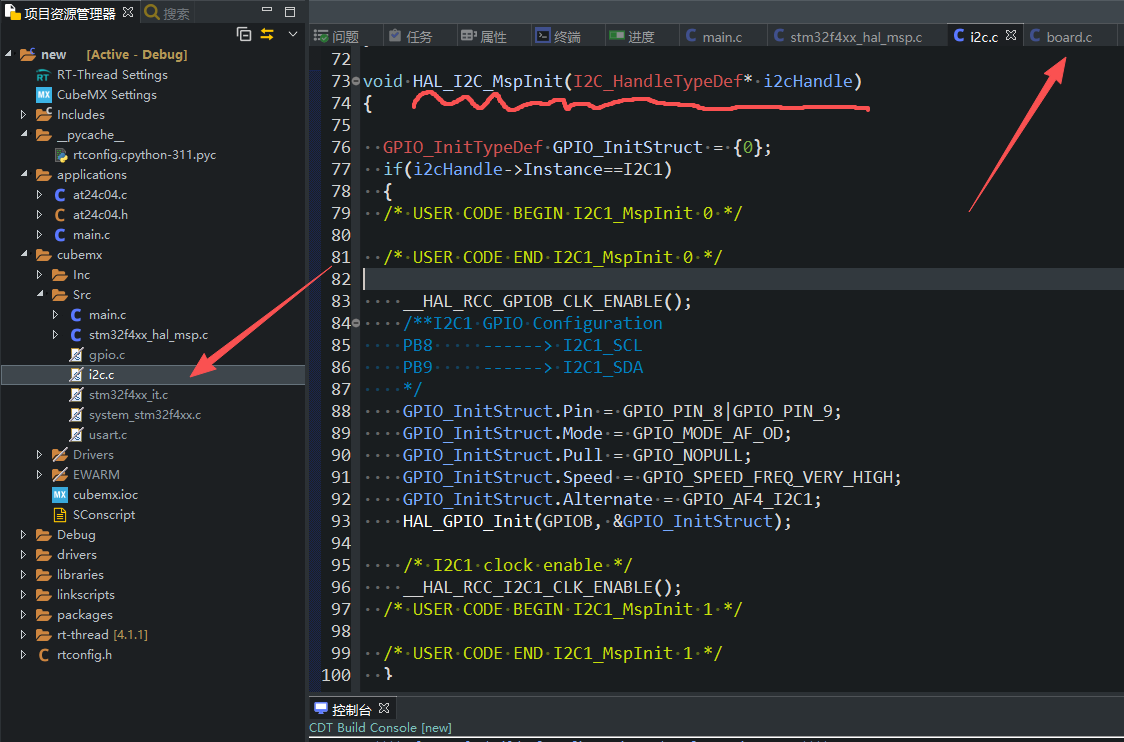
配置成功之后:把void HAL_I2C_MspInit(I2C_HandleTypeDef* i2cHandle)完整的函数全部复制到board.c里面。
这个函数的作用是:开启 I2C1 外设时钟、配置 PB8/PB9 的复用功能为 I2C1、开启上拉电阻,正好补全 RT-Thread 硬件 I2C 驱动需要的底层引脚初始化。
改成: GPIO_InitStruct.Pull = GPIO_PULLUP;
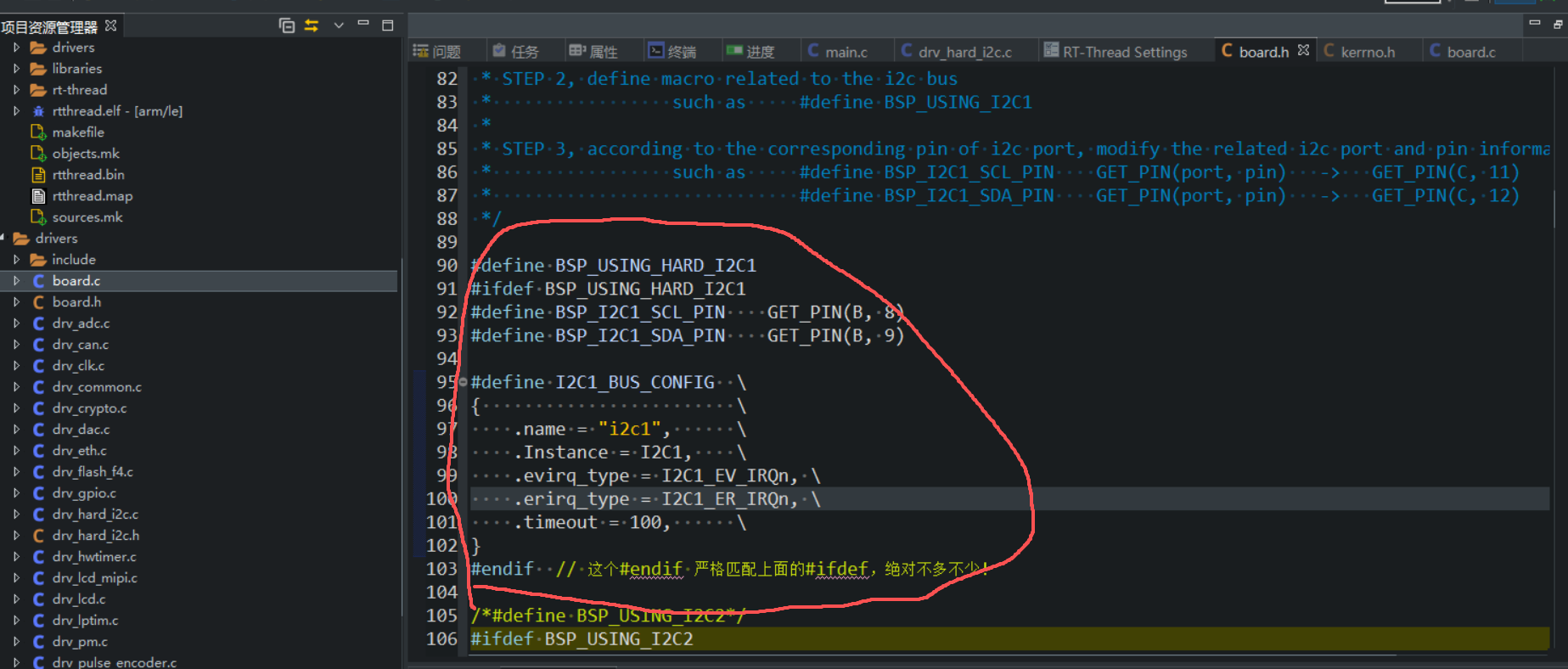
打开board.h进行引脚修改:
#define BSP_USING_HARD_I2C1
#ifdef BSP_USING_HARD_I2C1
#define BSP_I2C1_SCL_PIN GET_PIN(B, 8)
#define BSP_I2C1_SDA_PIN GET_PIN(B, 9)
#define I2C1_BUS_CONFIG \
{ \
.name = "i2c1", \
.Instance = I2C1, \
.evirq_type = I2C1_EV_IRQn, \
.erirq_type = I2C1_ER_IRQn, \
.timeout = 100, \
}
#endif // 这个#endif 严格匹配上面的#ifdef,绝对不多不少!直接改成跟我一样的
我使用的是4.1.1版本,在drivers里面没有硬件支持包,我们直接添加:
https://gitee.com/rtthread/rt-thread/tree/v5.2.2/bsp/stm32/libraries/HAL_Drivers/drivers
 把文件下载,然后拷贝这两个文件去我们的drivers里面
把文件下载,然后拷贝这两个文件去我们的drivers里面
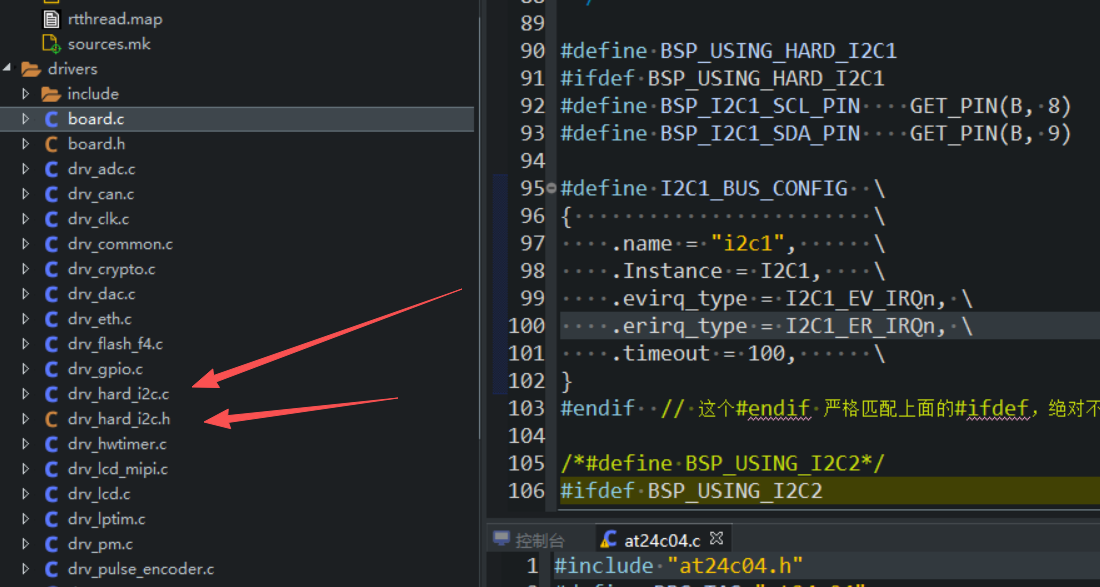
打开drv_hard_i2c.c,在最顶部添加这 2 行头文件:
#include <rtthread.h>
#include <rtdevice.h> // 解决 rt_ssize_t / RT_EFAULT 报错搜索return -RT_EFAULT;,全部改成
return -RT_ERROR;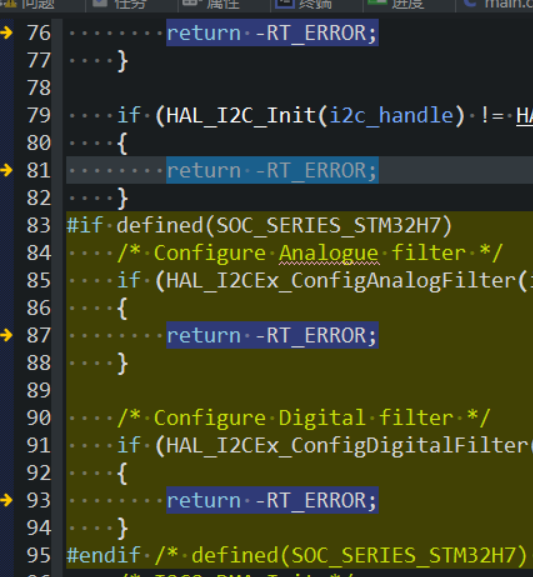
在drv_hard_i2c.c搜索:
static rt_ssize_t stm32_i2c_master_xfer(struct rt_i2c_bus_device *bus,改成:
static rt_size_t stm32_i2c_master_xfer(struct rt_i2c_bus_device *bus,main函数可以改一下:
cs
#include <rtthread.h>
#define DBG_TAG "main"
#define DBG_LVL DBG_LOG
#include <rtdbg.h>
// 引入我们刚才写好的 AT24C04 驱动头文件
#include "at24c04.h"
#include <rtdevice.h> // 必须包含这个头文件
int test_print_devices(void)
{
rt_kprintf("=== Registered Devices ===\n");
// 遍历系统设备链表并打印
struct rt_device *dev;
dev = rt_device_find("uart1"); // 先找个你肯定有的设备测试
if (dev != RT_NULL)
{
rt_kprintf("Found: uart1\n");
}
dev = rt_device_find("i2c1"); // 重点找 i2c1
if (dev != RT_NULL)
{
rt_kprintf("Found: i2c1 <-- 成功!硬件 I2C 已注册!\n");
}
else
{
rt_kprintf("Error: i2c1 NOT FOUND! <-- 硬件 I2C 驱动没跑起来!\n");
}
rt_kprintf("=== End of Device List ===\n");
return 0;
}
INIT_APP_EXPORT(test_print_devices);
int main(void)
{
// 1. 准备要写入的测试数据 (5个字节)
rt_uint8_t write_buf[20] = {
0x01, 0x02, 0x03, 0x04, 0x05, 0x06, 0x07, 0x08, 0x09, 0x0A,
0x0B, 0x0C, 0x0D, 0x0E, 0x0F, 0x10, 0x11, 0x12, 0x13, 0x14
};
// 2. 准备接收缓冲区 (注意:长度必须大于等于要读取的长度,这里设为 5)
rt_uint8_t read_buf[20] = {0};
// 3. 设定测试的物理地址
// 我们故意选 0x105 (十进制的 261),测试底层驱动是否能自动切换到设备地址 0x51
rt_uint16_t test_addr = 0x0105;
LOG_D("=== AT24C04 Read/Write Test Start ===");
// --------------------------------------------------------
// 第一步:执行写入操作
// --------------------------------------------------------
LOG_D("Writing 5 bytes to address 0x%03X...", test_addr);
//write_i2c1reg(test_addr, write_buf, 20);
LOG_D("Writing 20 bytes to address 0x%03X...", test_addr);
if (at24c04_page_write(test_addr, write_buf, 20) != 0)
{
LOG_E("Write failed!");
while(1);
}
LOG_D("Write success!");
// 【极度重要】每次写完必须延时!留给 EEPROM 内部 5ms 的 Flash 烧写时间。
// 这里给 50ms 比较宽裕,保证绝对稳定。
rt_thread_mdelay(50);
// --------------------------------------------------------
// 第二步:执行读取操作
// --------------------------------------------------------
LOG_D("Reading 5 bytes from address 0x%03X...", test_addr);
if (read_i2c1reg(test_addr, read_buf, 20) == 0)
{
LOG_D("Read command successful. Data is:");
// 将读回来的数据打印到串口终端
for(int i = 0; i < 20; i++)
{
rt_kprintf(" -> read_buf[%d]: 0x%02X\n", i, read_buf[i]);
}
}
else
{
LOG_E("Read command failed!");
}
// --------------------------------------------------------
// 第三步:数据自动校验
// --------------------------------------------------------
int is_match = 1;
for(int i = 0; i < 20; i++)
{
if(write_buf[i] != read_buf[i])
{
is_match = 0;
break; // 只要有一个字节对不上,就判为失败
}
}
if(is_match)
{
LOG_D("=== Test PASS! Data matched perfectly. ===");
}
else
{
LOG_E("=== Test FAIL! Data mismatch detected. ===");
}
// --------------------------------------------------------
// 第四步:线程挂起 (RTOS 规范)
// --------------------------------------------------------
// main 本质上也是一个线程,不能让它执行完退出。
// 用死循环配合延时,交出 CPU 控制权给其他任务。
while (1)
{
rt_thread_mdelay(1000);
}
return RT_EOK;
}然后工程清除一下,进行编译