摘要:本文针对自然场景下行人目标检测问题,设计并实现了一种基于方向梯度直方图(Histogram of Oriented Gradients, HOG)与支持向 量机(Support Vector Machine, SVM)的传统视觉检测方法。系统以 MATLAB 为开发平台,围绕行人外观的边缘、轮廓和局部梯度分 布特征展开建模,利用正负样本训练分类器,再结合多尺度滑动窗口完成测试图像中的行人搜索与定位。相较于依赖深度学习的大规模 检测框架,该方法结构清晰、实现成本较低,适合用于目标检测基础理论验证与传统机器视觉算法研究。
项目简介
本项目设计并实现了一套基于HOG特征提取与SVM分类器的多尺度滑动窗口行人检测系统,用于在复杂场景图像中完成行人目标的识别与定位。
系统概述
随着计算机视觉技术的不断发展,行人检测在视频监控、智能交通和自动驾驶等领域中具有重要的研究意义和应用价值。针对图像 中的行人目标检测问题,本文设计并实现了一种基于 HOG 特征和支持向量机(SVM)的行人检测系统。首先,对采集的正样本、负 样本以及困难负样本图像进行预处理,并统一调整为固定尺寸;然后利用梯度方向直方图(HOG)方法提取图像的特征信息,构建 样本特征向量;在此基础上,采用线性支持向量机对训练样本进行学习,建立行人与非行人的二分类模型
在检测阶段,系统对输入图像进行灰度化处理,并采用多尺度滑动窗口方法对整幅图像进行遍历,对每一个候选窗口提取 HOG 特征后输入训练好的 SVM 模型进行分类判断。当检测结果中出现多个重叠候选框时,利用候选框中心距离和重叠程度进行筛选, 从而减少重复标注现象,提高检测结果的准确性和可视化效果。
实验结果表明,本文所实现的行人检测系统能够较好地完成静态图像中的行人目标识别任务,对行人轮廓具有较好的表征能力。该方法整体结构清晰、实现过程较为简单,具有一定的实用性和可扩展性。本文的研究工作为进一步开展基于深度学习的目标检测研究提供了基础和参考。
系统架构
本系统采用"样本构建---特征提取---分类训练---多尺度检测---结果优化"的总体架构,首先对正负样本图像进行预处理并提取HOG特征,随后利用线性SVM完成行人与非行人的分类模型训练;在检测阶段,通过多尺度滑动窗口遍历待测图像,对候选区域提取特征并进行分类判别,最后结合重叠框抑制与结果筛选策略输出行人检测结果
数据集构建
本文训练数据集由正样本、负样本和困难负样本三部分构成。正样本为包含完整行人的图像区域,负样本为不含行人的背景图像, 困难负样本为与行人外观特征相近、易产生误检的背景区域。三类样本分别存放于不同文件夹中,在训练前统一进行灰度化和尺寸 归一化处理,全部调整为 (64 \times 128) 像素。随后提取每幅图像的 HOG 特征,并构建 3780 维特征向量,其中正样本标记为 1,负样本和困难负样本标记为 0。通过引入困难负样本,能够增强分类器对复杂背景的识别能力,提高行人检测系统的整体性能
快速开始
本项目无需额外安装复杂依赖,在 MATLAB 环境下打开工程后,可直接运行 MainCode.m 启动行人检测流程,或运行 TrainHogFeatureWithSVM.m 进行模型训练;完成训练后,还可运行 test.m 对分类效果进行测试与结果分析。
环境要求
本项目建议在 Windows 环境下运行,并在 MATLAB 环境中完成代码开发、模型训练与检测实验。项目主要依赖 MATLAB 提 供的图像读取、图像缩放、灰度处理、分类训练与结果可视化等相关功能,可支持行人检测系统的训练、测试与检测流程运行。
结果展示
运行TrainHogFeatureWithSVM.m
图1 训练行人检测模型
运行test.m
图2 对测试集样本进行二分类测试 验证模型效果
运行MainCode.m
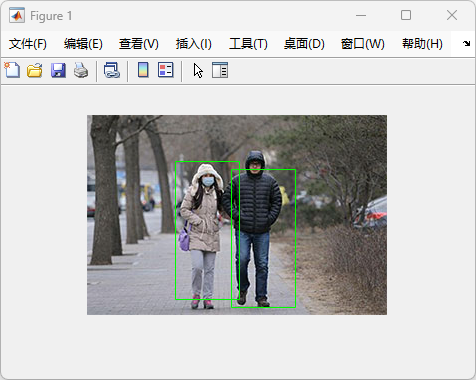
图3 对单张测试图像执行多尺度滑窗行人检测
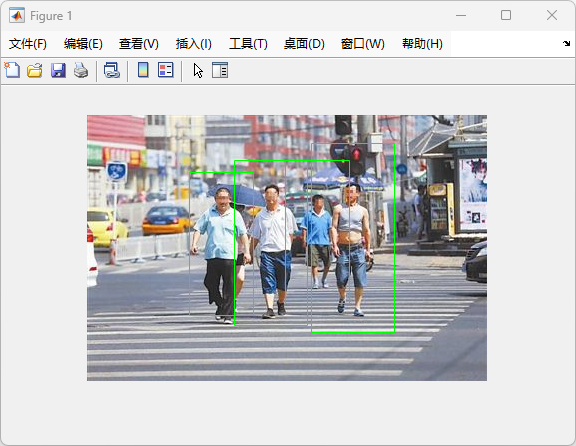
图4 对单张测试图像执行多尺度滑窗行人检测
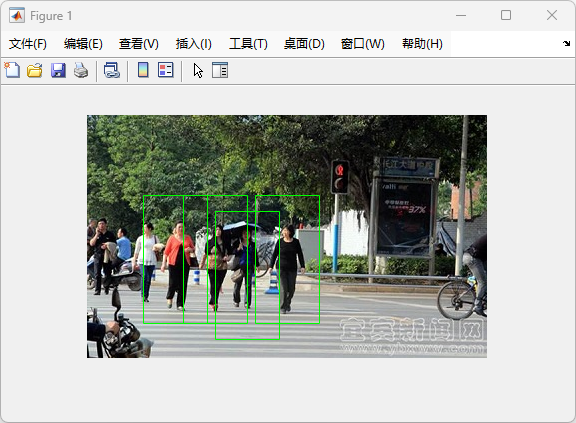
图5 对单张测试图像执行多尺度滑窗行人检测
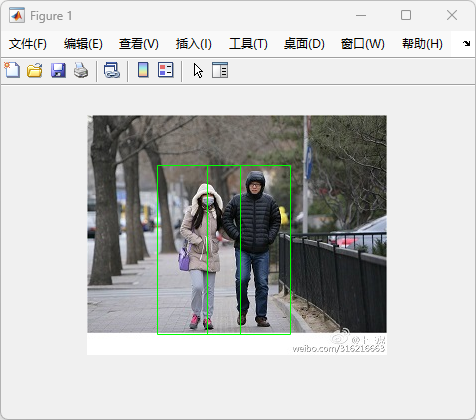
图6 对单张测试图像执行多尺度滑窗行人检测
结果点评
实验结果表明,本文所实现的行人检测系统能够对图像中的大部分行人目标进行有效识别,尤其是在目标轮廓清晰、背景相对简单 的情况下,检测效果较好。通过引入困难负样本和重叠框筛选策略,系统在一定程度上减少了误检和重复检测现象。但在复杂背景 、小尺度目标以及遮挡情况下,仍存在误检和漏检问题。总体来看,本文方法实现了预期功能,验证了 HOG 与 SVM 结合用于行人检测的可行性,同时也为后续进一步优化检测算法提供了基础。
项目资源
包括完整的项目源代码、演示视频、运行截图,开箱即用。

关于项目
作者信息
作者:Bob (张家梁)
原创声明:本项目为原创作品