前言
STM32系列单片机凭借其强大的性能和丰富的外设,在嵌入式领域占据着举足轻重的地位。而GPIO(General Purpose Input Output)作为MCU与外界交互最基本也最重要的接口,其工作模式的正确理解和灵活运用,直接决定了项目的稳定性和可靠性。
很多初学者甚至有一定开发经验的工程师,对于STM32的八种GPIO模式往往停留在"会用"但"不知道为什么用"的阶段。本文将深入浅出地剖析每种模式的工作原理、内部电路结构、典型应用场景,并给出实用的选型建议。
一、GPIO基本结构概述
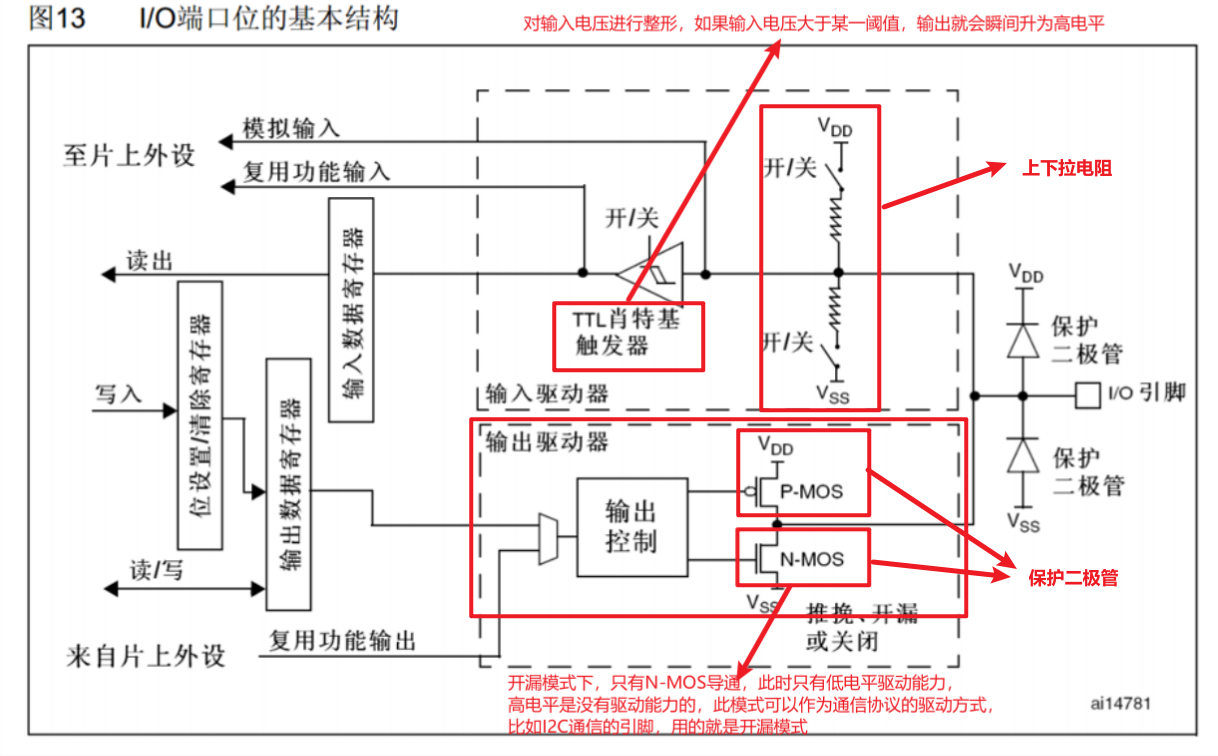
在深入八种模式之前,先了解STM32 GPIO的基本内部结构,一个典型的GPIO引脚内部包含:
-
保护二极管:防止引脚电压过高或过低损坏芯片
-
上下拉电阻:可配置的弱上拉/下拉电阻(约30-50kΩ)
-
TTL施密特触发器:对输入信号进行整形
-
输出驱动电路:包含PMOS和NMOS管
-
复用功能选择器:选择GPIO模式或外设功能
理解这个结构,后面八种模式就很容易理解了。
通过配置GPIO的端口配置寄存器,端口可以配置成以下8种模式:
|----------|--------|---------------------------|
| 模式名称 | 性质 | 特征 |
| 浮空输入 | 数字输入 | 可读取引脚电平,若引脚悬空,则电平不确定 |
| 上拉输入 | 数字输入 | 可读取引脚电平,内部连接上拉电阻,悬空时默认高电平 |
| 下拉输入 | 数字输入 | 可读取引脚电平,内部连接下拉电阻,悬空时默认低电平 |
| 模拟输入 | 模拟输入 | GPIO无效,引脚直接接入内部ADC |
| 开漏输出 | 数字输出 | 可输出引脚电平,高电平为高阻态,低电平接VSS |
| 推挽输出 | 数字输出 | 可输出引脚电平,高电平接VDD,低电平接VSS |
| 复用开漏输出 | 数字输出 | 由片上外设控制,高电平为高阻态,低电平接VSS |
| 复用推挽输出 | 数字输出 | 由片上外设控制,高电平接VDD,低电平接VS |
1、浮空/上拉/下拉输入
这三个模式的电路结构基本是一样的,区别就是上拉电阻和下拉电阻的连接,他们都属于数字的输入口,特征就是都可以读取端口的高低电平,当引脚悬空是,上拉电阻输入默认是高电平,下拉默认是低电平,而浮空输入的电平不确定,多以再使用浮空输入时,端口一定要接上一个连续的驱动源,不能出现悬空的状态。
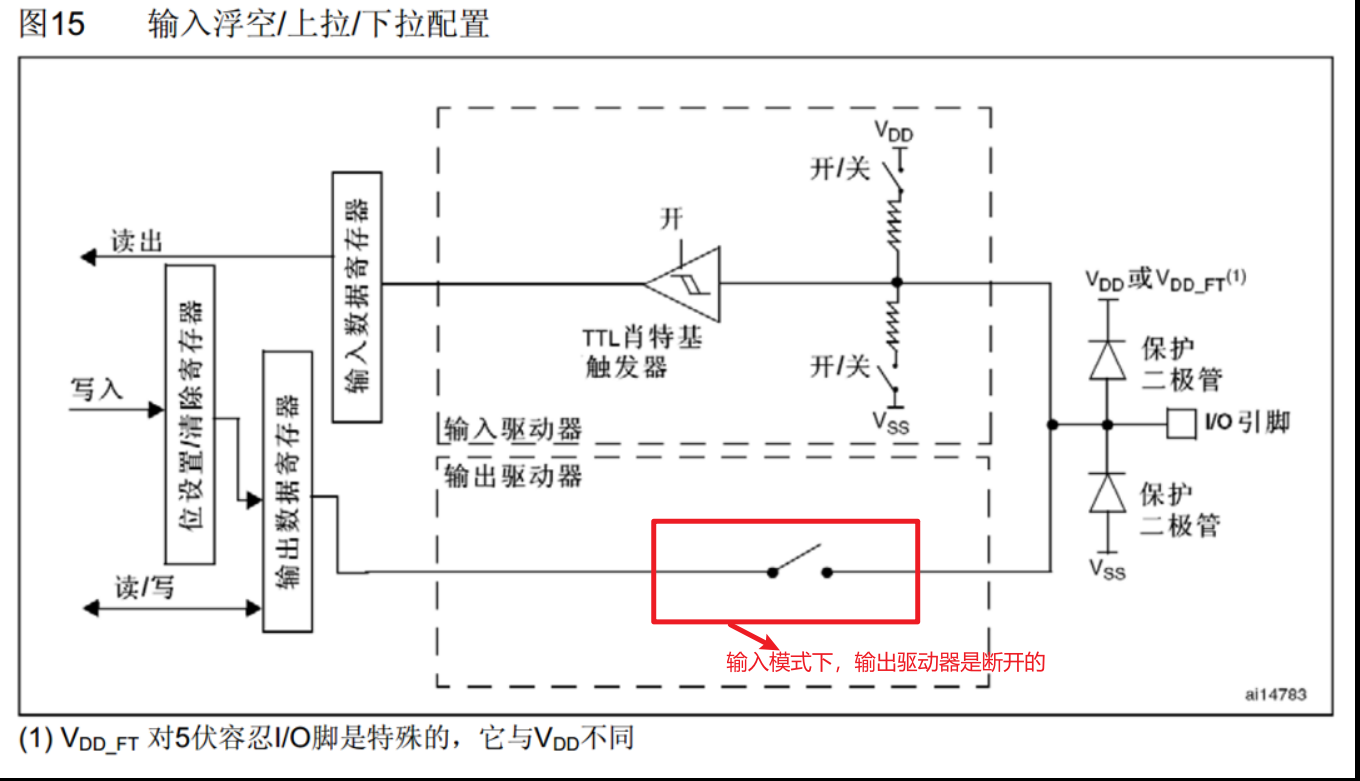
从图中可以看出这三种输入模式在内部电路结构上基本一致,核心区别仅在于内部两个弱上拉/下拉电阻的通断状态。它们的共同点是:输出驱动器(PMOS+NMOS)均被禁用,引脚电平经施密特触发器整形后送入输入数据寄存器供CPU读取。区别在于:
- 浮空输入模式下,上拉电阻和下拉电阻都断开,引脚完全悬空,输入阻抗极高(可达百兆欧级),因此电平完全由外部信号决定,一旦外部信号悬空,引脚就会像天线一样感应周围电磁干扰,导致读数随机跳变;
- 上拉输入模式则接通内部上拉电阻(约30-50kΩ)到VDD,使得引脚悬空时默认被拉至高电平,只有当外部信号主动拉低(强驱动拉至GND)时才会读到低电平;
- 下拉输入模式相反,接通内部下拉电阻到GND,引脚悬空时默认为低电平,需要外部信号主动拉高才能读到高电平。
简单来说,这三种模式共用同一套数字输入通路,只是通过配置寄存器决定是否接入上拉或下拉电阻。实际使用时:如果外部信号源输出阻抗很低且电平确定(比如推挽输出的另一个引脚),优先用浮空输入以避免上下拉电阻对信号的分压影响;如果外部设备可能悬空或需要默认电平(如机械按键一端接地),则根据希望默认读取的值选择上拉输入(默认高)或下拉输入(默认低);而如果外部信号上升沿或下降沿较缓,上下拉电阻还能起到一定的抗噪作用,帮助施密特触发器获得更干净的边沿。
2、模拟输入模式(GPIO_Mode_AIN)
模拟输入模式在八种模式中最为特殊,它的内部电路与其他七种数字模式有着本质区别:当引脚配置为模拟输入时,不仅输出驱动器(PMOS和NMOS)被完全禁用,更重要的是TTL施密特触发器被关闭,即整个数字输入通路被切断,引脚电压不再经过任何整形或缓冲,而是直接通过模拟输入通道连接到ADC(模数转换器)、COMP(比较器)或OPAMP(运算放大器)等模拟外设,如下图所示:
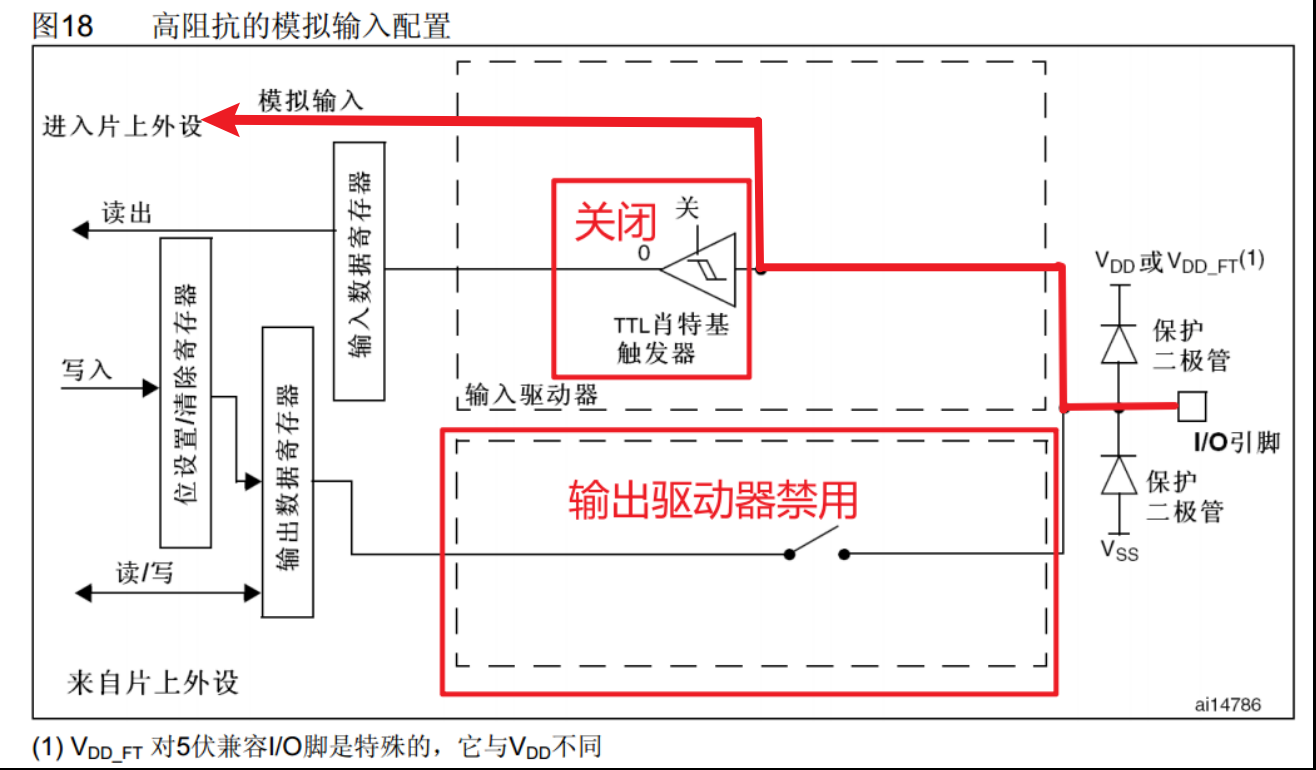
这种设计的核心目的是避免数字噪声对模拟信号的污染 ------如果施密特触发器保持开启,其内部的开关电容在采样时会不断充放电,产生注入噪声,叠加在模拟信号上会严重降低ADC的精度。此外,模拟输入模式下,内部的上拉电阻和下拉电阻也全部断开,引脚呈现极高的输入阻抗(通常>100MΩ),几乎不从外部信号源吸取电流,从而保证模拟信号源不会被负载效应拉偏。需要特别注意的是,任何需要进行模拟量采集的场景,都必须将对应的GPIO配置为模拟输入模式 ,哪怕是浮空输入模式也不行------因为浮空输入虽然输出驱动器禁用,但施密特触发器仍在工作,其带来的噪声足以让12位ADC的有效位数损失1~2位。典型应用包括:电池电压检测、温度传感器(NTC或LM35)、光敏电阻分压采集、麦克风音频信号输入、电流采样电阻的差分放大输出等。使用时要留意,一旦配置为模拟输入,CPU通过输入数据寄存器(IDR)读取到的值将始终为0,因为数字通路已被切断,所以不要试图用这种方式判断模拟引脚的电平状态。
3、开漏输出/推挽输出
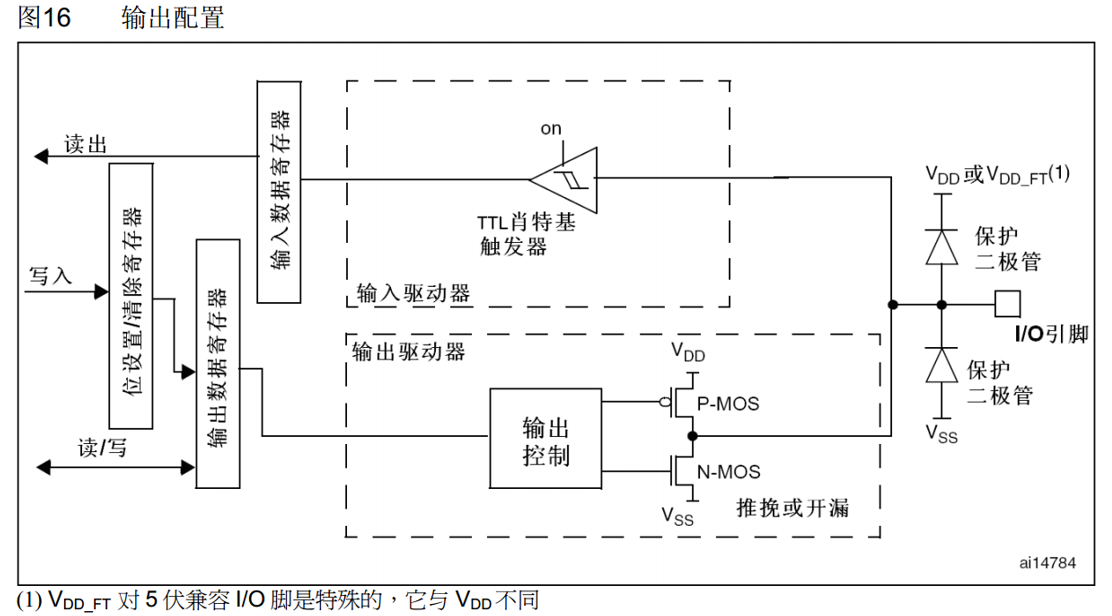
推挽输出和开漏输出在内部电路结构上高度一致,都由一个**输出数据寄存器(ODR)**控制、都有一对互补的MOS管(上方为PMOS,下方为NMOS)构成输出驱动级。两者的本质区别在于:
- 推挽输出模式下,PMOS和NMOS都正常工作------输出高电平时PMOS导通、NMOS截止,引脚被主动"推"到VDD;输出低电平时PMOS截止、NMOS导通,引脚被主动"挽"到GND。因此推挽输出能够主动驱动高低两种电平,输出阻抗很低(几十欧姆),驱动能力强,可直接点亮LED或驱动小功率负载。
- 开漏输出模式下,上方的PMOS被强制关闭(始终不导通) ,只留下方的NMOS工作------输出低电平时NMOS导通,引脚被拉到GND;输出高电平时NMOS截止,引脚呈现高阻态,既不是高也不是低,此时必须依赖外部上拉电阻才能将电平拉高。从电路结构看,开漏输出相当于"推挽输出砍掉了PMOS",只保留了主动拉低的能力。由于这个特性,开漏输出天然支持**"线与"逻辑**:多个开漏输出引脚可以直接并联,只要任何一个输出低电平,总线就是低电平;只有所有引脚都输出高阻态(即都试图输出高电平)时,总线才会被外部上拉电阻拉高。这使得开漏输出成为I2C、SMBus等多设备共享总线的唯一选择。
在选型上,90%的数字输出场景用推挽输出即可,它响应快、驱动强、不需要外部电阻;而以下场景必须用开漏输出:①I2C总线的SDA和SCL(协议强制要求);②多个中断输出共用一个MCU引脚(线与实现"任一触发");③电平不匹配的通信(如3.3V MCU与5V设备相连,通过上拉到5V实现电平转换);④模拟I2C时序时用软件控制开漏输出。
需要特别注意的是,两个推挽输出的引脚绝对不能直接并联,否则一个输出高一个输出低时会形成VDD到GND的低阻通路,瞬间大电流可能烧毁引脚;而多个开漏输出引脚可以直接并联,只需一个公共上拉电阻即可安全可靠地工作。
4、复用推挽输出与复用开漏输出
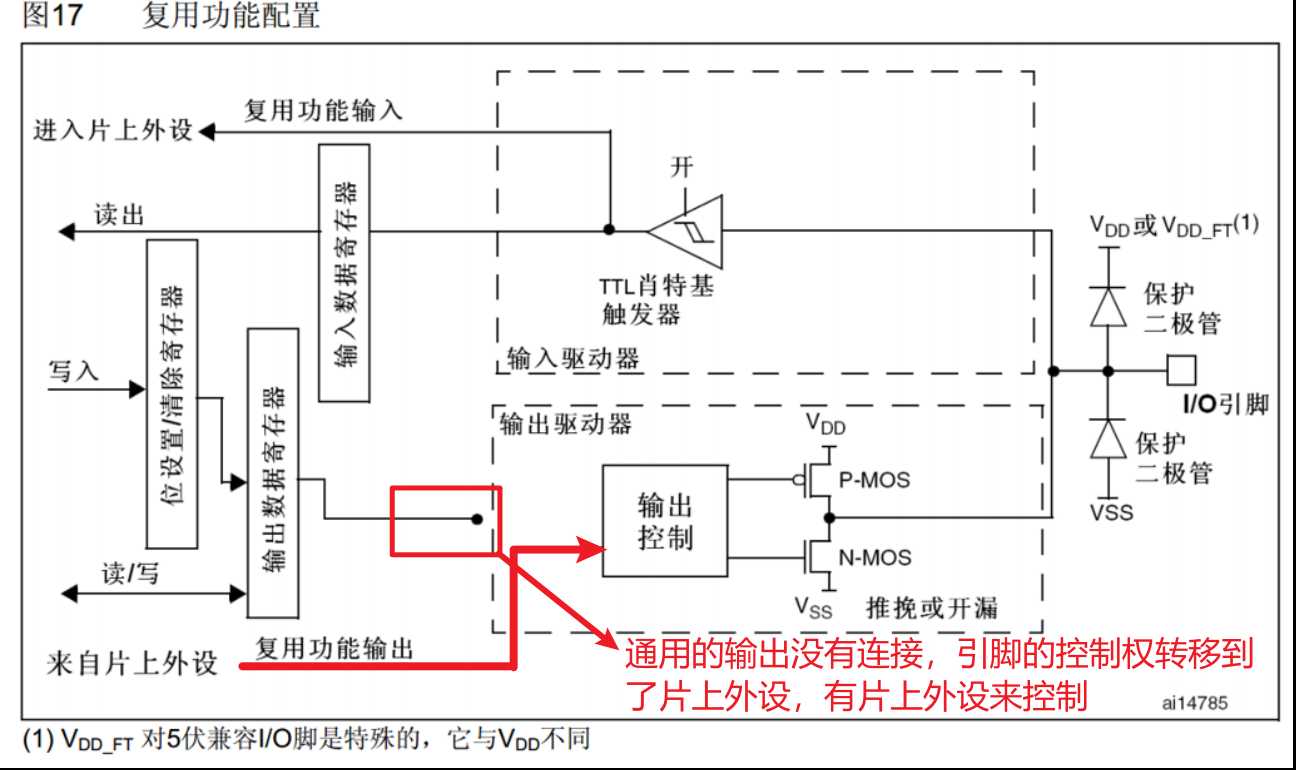
复用推挽输出和复用开漏输出在电气特性上与普通推挽、普通开漏完全一致 ------前者同样由PMOS+NMOS构成、能主动驱动高低电平;后者同样只有NMOS工作、需要外部上拉电阻才能输出高电平。两者唯一的区别在于输出数据的来源 :普通模式下,引脚输出的电平由输出数据寄存器(ODR) 控制,用户通过调用HAL_GPIO_WritePin()或直接操作ODR寄存器来手动拉高拉低;而复用模式下,输出驱动级的控制权被交给了片内外设 (如USART、SPI、I2C、定时器),引脚电平完全由外设内部逻辑自动决定,ODR寄存器对该引脚不再起作用。从内部电路看,可以理解为在普通推挽/开漏的输入端增加了一个"二选一"的数据选择器(MUX),一端连接ODR,另一端连接外设的发送数据线,复用模式就是把这个选择器拨到了外设那边。典型应用场景中:USART的TX、SPI的MOSI/SCK、定时器的PWM输出通道、SDIO的数据线等需要外设主动翻转电平的场景,都配置为复用推挽输出 ;而硬件I2C的SDA/SCL(如果使用芯片内置的I2C外设而非GPIO模拟)、某些CAN收发器的控制引脚、以及需要外设以开漏形式驱动多设备总线的特殊场景,则配置为复用开漏输出。
需要特别注意的是:配置复用模式时,除了设置Mode为GPIO_MODE_AF_PP或GPIO_MODE_AF_OD外,还必须通过AFR寄存器选择具体的复用功能编号 (例如将PA9配置为USART1_TX时,需要查数据手册知道USART1_TX对应AF1还是AF7),否则外设信号无法正确连接到引脚。另外,复用开漏输出模式下,同样需要外部上拉电阻才能产生高电平------很多初学者将I2C引脚配置为复用开漏后忘记接上拉电阻,导致通信时SCL/SDA的高电平上不去,波形呈"残废"状。总结一句话:普通模式是CPU手动控制引脚,复用模式是外设自动控制引脚,选哪种完全取决于你希望谁来操控这个引脚的电平。
二、模式选择速查表
| 应用场景 | 推荐模式 | 原因 |
|---|---|---|
| 读取外部数字信号(高电平有效) | 下拉输入 | 默认低电平,外部拉高 |
| 读取外部数字信号(低电平有效) | 上拉输入 | 默认高电平,外部拉低 |
| 读取按键(按键接地) | 上拉输入 | 松开默认高,按下接地变低 |
| 读取按键(按键接VDD) | 下拉输入 | 松开默认低,按下接VDD变高 |
| ADC模拟电压采集 | 模拟输入 | 避免数字噪声干扰 |
| 驱动LED(低电平点亮) | 推挽输出 | 驱动能力强,响应快 |
| 驱动LED(高电平点亮) | 推挽输出 | 驱动能力强,注意电流限制 |
| I2C总线(SDA/SCL) | 复用开漏输出 | 符合I2C协议要求 |
| 软件模拟I2C | 开漏输出 | 实现"线与"功能 |
| 控制MOS管/继电器 | 推挽输出 | 需要足够驱动电流 |
| USART的TX | 复用推挽输出 | 标准异步串口输出 |
| 定时器PWM输出 | 复用推挽输出 | 需要高速电平翻转 |
| 多个中断信号共享一个引脚 | 开漏输出 + 外部上拉 | 实现"线与"逻辑 |
| 读取高速数字信号(SPI MISO) | 浮空输入 | 外部已有确定电平 |
| 低功耗唤醒引脚 | 上拉/下拉输入 | 避免悬空造成额外功耗 |
三、实战配置示例(基于HAL库)
1、按键检测(上拉输入)
cpp
GPIO_InitTypeDef GPIO_InitStruct = {0};
// 使能时钟
__HAL_RCC_GPIOA_CLK_ENABLE();
// 配置PA0为上拉输入模式
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP; // 上拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
// 读取按键状态
if(HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET) {
// 按键按下(低电平有效)
}2、驱动LED(推挽输出)
cpp
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_1;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // LED不需要高速
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 点亮LED(假设低电平点亮)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_1, GPIO_PIN_RESET);3、I2C开漏输出(硬件I2C)
cpp
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_I2C1_CLK_ENABLE();
// 配置PB6为I2C1_SCL(复用开漏)
GPIO_InitStruct.Pin = GPIO_PIN_6;
GPIO_InitStruct.Mode = GPIO_MODE_AF_OD; // 复用开漏
GPIO_InitStruct.Pull = GPIO_PULLUP; // 使能内部上拉(可选)
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF4_I2C1; // 具体AF编号查数据手册
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
// 配置PB7为I2C1_SDA(复用开漏)
GPIO_InitStruct.Pin = GPIO_PIN_7;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);4、模拟输入(ADC采样)
cpp
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_ADC1_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_0;
GPIO_InitStruct.Mode = GPIO_MODE_ANALOG; // 模拟输入模式
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
// ADC配置代码省略...四、总结
STM32的八种GPIO模式看似复杂,但只要理解了内部结构,就很容易掌握。总结为三点心法:
-
输入看外部:外部已有确定电平用浮空,外部悬空用上下拉,模拟信号用模拟输入。
-
输出看总线:独自驱动用推挽,总线共享用开漏。
-
控制看归属:软件控制用普通模式,外设控制用复用模式。
在实际开发中,90%的场景只需要掌握:上拉输入、下拉输入、推挽输出、复用推挽输出这四种。剩下的模式在特定场景下(I2C、ADC、多设备总线)发挥着不可替代的作用。
希望这篇文章能帮助你彻底搞懂STM32的GPIO模式,写出更健壮、更专业的嵌入式代码。