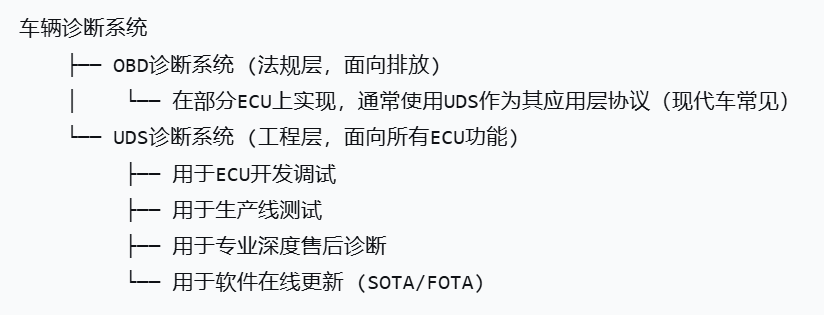
一、诊断分类
汽车诊断通常分为OBD和UDS:
关键区别与关系总结
| 特性 | OBD(法规诊断) | UDS(增强/工程诊断) |
|---|---|---|
| 核心目标 | 排放监控,法规符合性 | ECU开发、测试、生产、深度售后诊断 |
| 强制性 | 法规强制,面向市场准入 | 行业标准,非强制但已成事实全球标准 |
| 标准化 | 接口、协议、DTC完全统一 | 服务格式统一 ,具体内容由车厂自定义 |
| 功能范围 | 窄而固定(约9项服务,仅限排放相关) | 宽而灵活(约30项服务,覆盖ECU所有功能) |
| 使用场景 | 快速排放故障排查,通用扫描仪 | ECU开发、软件刷写、深入故障分析、专业设备 |
| 通信协议 | 一套完整的物理层到应用层规范 | 仅定义应用层,可承载于CAN、Ethernet等 |
| 诊断对象 | 主要为与排放相关的ECU(如发动机ECU) | 车辆上几乎所有ECU(车身、底盘、动力、娱乐等) |
UDS协议定义基础的编码规则和服务逻辑,但具体的DID编码、对应的数据内容都是由车厂自主定义的。
诊断过程是诊断仪按照严格的协议规范 和时序要求 ,通过与ECU建立受控的会话状态 ,在通过安全验证 后,发送格式化的诊断请求 ,然后解析ECU返回的结构化响应 (可能是肯定响应、否定响应或等待响应),并基于此进行系统化的故障分析和车辆维护的完整工程流程。
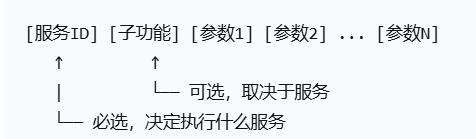
服务ID(Service Identifier,SID) 就是UDS协议中那些十六进制代码 ,比如0x22、0x10、0x19等。它们就像是诊断服务的"命令代码"或"功能编号"。
UDS请求报文格式
二、26个服务的分类
ISO 14229-1 标准定义的核心服务
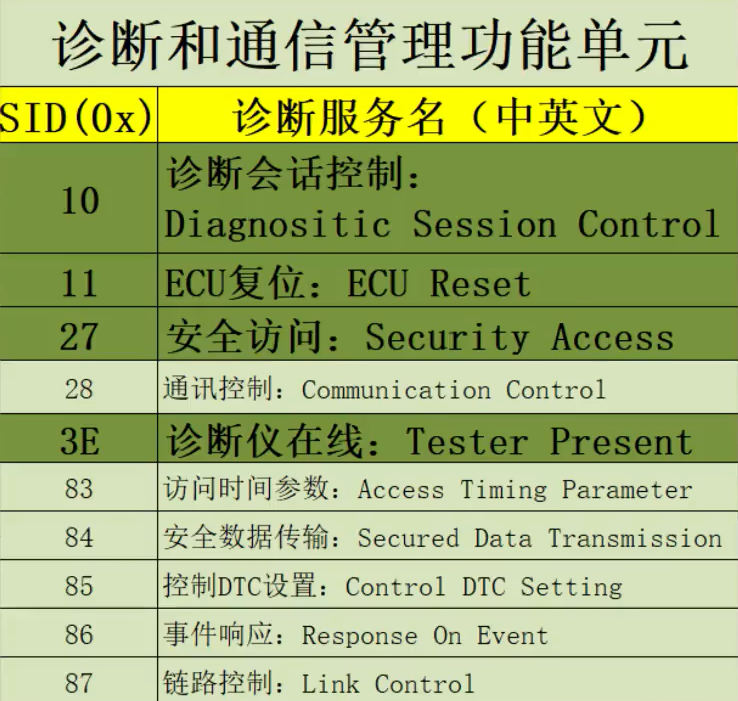
2.1 诊断和通信管理单元
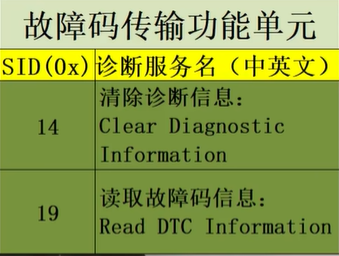
2.2 故障码传输功能类
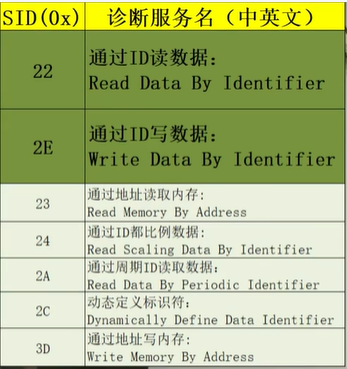
2.3 数据传输类
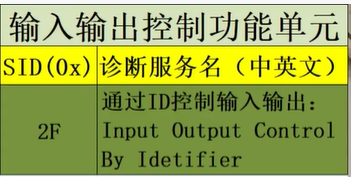
2.4 输入输出控制类
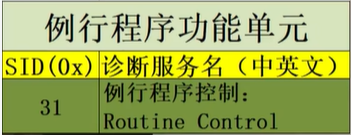
2.5 例行程序控制单元
三、UDS报文格式
标准诊断会话模式(单次服务)
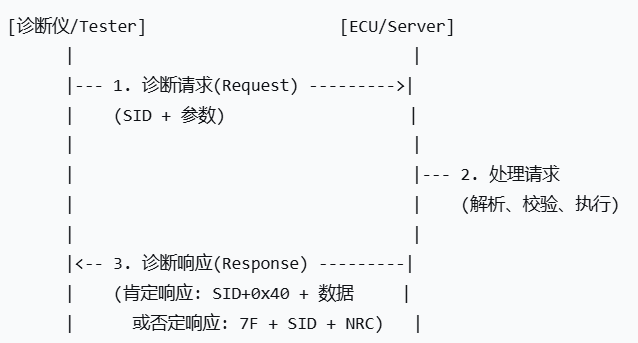
一个完整的诊断操作通常由多个"请求-响应"对按特定顺序组成。
【举例】
目标:写入配置数据(0x2E 服务),该服务需要先通过安全访问(0x27)解锁。
| 步骤 | 请求方 | 请求 (SID + 参数) | 响应方 | 响应 (RSID/NRC + 数据) | 说明 |
|---|---|---|---|---|---|
| 1 | Tester | 0x10 03 (进入扩展会话) |
ECU | 0x50 03 (肯定响应) |
切换会话模式 |
| 2 | Tester | 0x27 01 (请求种子) |
ECU | 0x67 01 [Seed] (肯定) |
获取随机种子 |
| 3 | Tester | 0x27 02 [Key] (发送密钥) |
ECU | 0x67 02 (肯定) |
密钥正确,解锁 |
| 4 | Tester | 0x2E [DID] [Data] (写数据) |
ECU | 0x6E [DID] (肯定) |
执行受保护操作 |
| 5 | Tester | 0x10 01 (返回默认会话) |
ECU | 0x50 01 (肯定) |
退出诊断模式 |
模式总结 : 复杂的诊断任务实质是多个原子化的"请求-响应"对,按业务逻辑串行组合而成的状态机。
3.1 诊断请求和响应
本质是一段十六进制的报文。
【诊断请求】

注:01 07是电压的DID。
DID(Data Identifier,数据标识符),它是每一条数据的"身份证号",在整个ECU系统中唯一对应一项具体信息。比如,车辆VIN码的DID是F1 90,软件版本的DID是F1 87(具体DID由车厂定义)。有了DID,我们就可以对车辆信息进行读(22)、写(2E)等操作。
【肯定响应】

【否定响应】

3.2 UDS的否定响应码
否定响应码是一个字节(0x00~0xFF)的标准化代码,用于精确告知诊断仪服务请求失败的具体原因 。格式固定为:7F [Requested SID] [NRC]。
常见的否定响应码:

常见NRC分类与实例
1. 与条件不满足相关的NRC
这类NRC表示ECU理解请求,但当前状态不允许执行。
| NRC | 助记符 | 说明 | 典型场景实例 |
|---|---|---|---|
| 0x22 | conditionNotCorrect |
条件不正确。这是最常遇到的NRC之一,表示请求的服务在当前车辆或ECU状态下无法执行。 | 1. 0x31 RoutineControl (例: 0x31 01 02 00) :请求执行"燃油泵测试"例程,但发动机正在运行 。ECU会回复 7F 31 22。 2. 0x2E WriteDataByIdentifier :尝试写入一个只允许在"点火开关ON,车辆静止"状态下写入的DID,但车速>0。 |
| 0x12 | subFunctionNotSupported |
子功能不支持。请求的服务子功能参数无效或在此ECU上未实现。 | 0x10 DiagnosticSessionControl :请求进入 0x10 04 (排放相关诊断会话),但该ECU不支持此子功能。响应:7F 10 12。 |
| 0x24 | requestSequenceError |
请求序列错误。请求的步骤顺序不正确。 | 0x27 SecurityAccess :未先请求种子(0x27 01),直接发送密钥(0x27 02 [Key])。响应:7F 27 24。 |
2. 与参数错误相关的NRC
这类NRC表示请求中的参数值本身有问题。
| NRC | 助记符 | 说明 | 典型场景实例 |
|---|---|---|---|
| 0x31 | requestOutOfRange |
请求超出范围。请求的参数值(如DID、RID)无效、未知或不支持。 | 1. 0x22 ReadDataByIdentifier :请求读取 DID=0xF1C7,但ECU不支持此DID。响应:7F 22 31。 2. 0x19 ReadDTCInformation :使用不支持的子功能,如 0x19 08。 |
| 0x33 | securityAccessDenied |
安全访问被拒绝。尝试执行需要安全解锁的服务,但未解锁或解锁失败。 | 0x2E WriteDataByIdentifier 或 0x31 RoutineControl :在未通过0x27服务成功解锁 的情况下,尝试写入关键配置或执行刷写例程。响应:7F 2E 33 或 7F 31 33。 |
| 0x35 | invalidKey |
无效密钥 。在0x27服务中,提供的密钥与ECU计算的期望密钥不匹配。 |
0x27 SecurityAccess :发送密钥 0x27 02 [Key],但Key计算错误。响应:7F 27 35。 |
3. 与协议/格式错误相关的NRC
这类NRC表示请求不符合UDS报文格式或通信规则。
| NRC | 助记符 | 说明 | 典型场景实例 |
|---|---|---|---|
| 0x13 | incorrectMessageLengthOrInvalidFormat |
报文长度不正确或格式无效。请求报文的长度与预期不符,或参数格式错误。 | 1. 0x22 :请求DID时只发送了22 01(缺少低字节)。响应:7F 22 13。 2. 多帧传输错误:流控帧参数设置矛盾。 |
| 0x14 | responseTooLong |
响应太长 。用于服务器告知客户端,其响应数据太长,但客户端未支持多帧传输(即未正确初始化流控)。现已较少使用。 | 在单帧请求 模式下,请求了一个会产生长响应的服务(如读取所有DTC信息 0x19 0A)。 |
| 0x72 | generalProgrammingFailure |
常规编程错误。在ECU编程(刷写)过程中发生非特定的失败。 | 0x34 RequestDownload 或 0x36 TransferData :尝试写入闪存时,发生校验和错误、电压不稳或硬件故障。响应:7F 34 72。 |
4. 与会话/安全状态相关的NRC
这类NRC与诊断会话层级和安全状态直接相关。
| NRC | 助记符 | 说明 | 典型场景实例 |
|---|---|---|---|
| 0x11 | serviceNotSupported |
服务不支持。当前会话中不支持请求的服务ID。 | 在默认会话(0x01) 下,尝试执行只能在扩展会话(0x03) 中使用的服务,如 0x27、0x28、0x2E、0x31 等。响应:7F [SID] 11。 |
| 0x7E | subFunctionNotSupportedInActiveSession |
活动会话中不支持此子功能。请求的服务子功能在当前激活的诊断会话中不可用。 | 在编程会话(0x02) 中,尝试执行 0x28 01 (恢复通信),但该子功能在编程会话中被禁用。响应:7F 28 7E。 |
| 0x7F | serviceNotSupportedInActiveSession |
活动会话中不支持此服务。与0x11类似,但更具体地指向会话限制。 |
总结表:从现象快速定位问题
| 你尝试做什么? | 可能收到的NRC | 首要排查方向 |
|---|---|---|
| 读取/写入数据 | 0x31 |
DID/RID是否正确?ECU型号是否支持? |
| 执行例程/控制 | 0x22 |
车辆状态是否满足(停车、熄火、特定电压等)? |
| 进行安全解锁 | 0x35 |
种子算法或密钥计算是否正确? |
| 在默认会话做高级操作 | 0x11 |
是否已切换到扩展会话(0x03)? |
| 任何需要解锁的操作 | 0x33 |
是否已完成0x27安全访问并成功? |
3.3 请求和响应的寻址
UDS诊断通信的报文是通过CAN协议传输的,UDS诊断的报文就是CAN报文;UDS请求和响应的ID就是CAN报文的ID。请求和响应的信息
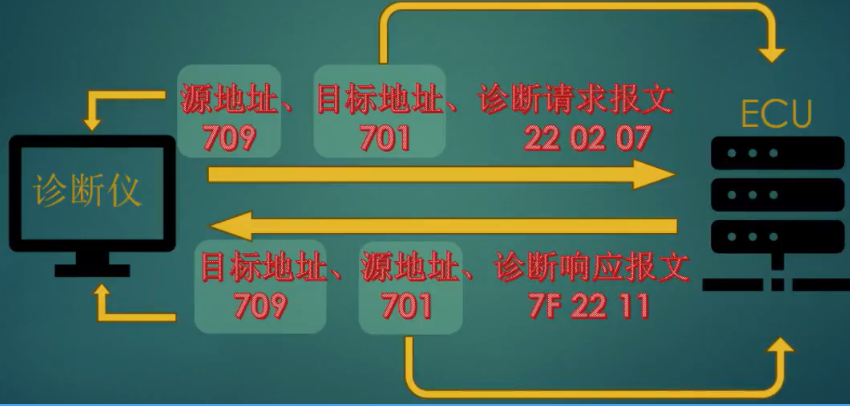
每个ECU在UDS诊断通信中拥有两个专属的、唯一的CAN ID,一个用于"接收"诊断请求,一个用于"发送"诊断响应。
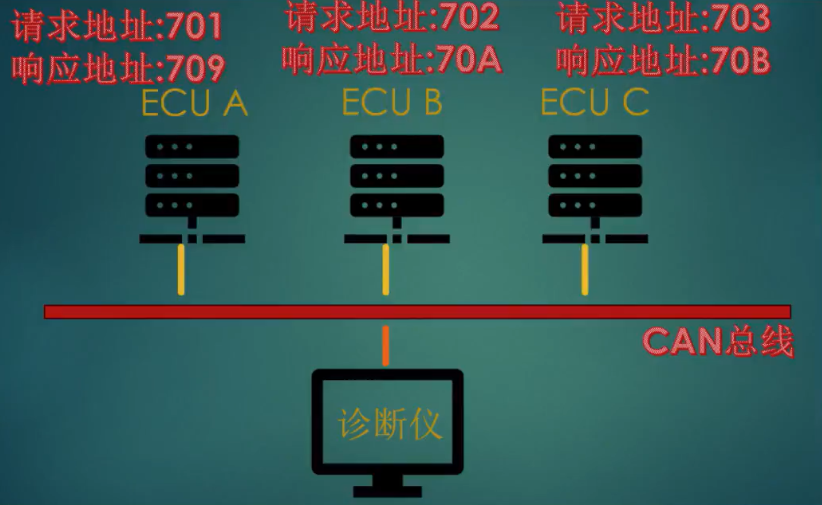
2. 通信过程解析(以ECU A为例)
诊断仪希望与 ECU A 对话,过程如下:
步骤1:诊断仪发送请求
-
诊断仪将诊断命令(如
22 01 07读取车速)封装在CAN报文的数据场中。 -
将这条报文的 CAN ID(仲裁场) 设置为 ECU A的请求地址
0x701。 -
报文被广播到CAN总线上。
步骤2:ECU A接收并处理请求
-
总线上所有ECU(A、B、C)都"听到"了这条ID为
0x701的报文。 -
ECU A 的CAN控制器硬件或软件过滤器识别出
0x701是自己的"专属呼叫ID",于是接收并处理这条请求。 -
ECU B和C发现ID(
0x702,0x703)与自己的不匹配,于是忽略此报文。
步骤3:ECU A发送响应
-
ECU A处理完请求后,准备回复(如
62 01 07 00 50)。 -
它将响应数据封装在新的CAN报文数据场中。
-
将这条响应报文的 CAN ID 设置为自己的响应地址
0x709,并发送到总线上。
步骤4:诊断仪接收响应
-
诊断仪一直在监听总线,当看到ID为
0x709的报文时,就知道这是来自ECU A的回复。 -
诊断仪根据ID
0x709即可将响应数据与之前发给0x701的请求关联起来,完成一次完整的诊断对话。
3. 为什么这样设计?(优点)
-
精准寻址:诊断仪可以通过设置不同的请求ID,与网络上任意一个特定的ECU进行一对一通信,避免多个ECU同时响应造成总线混乱。
-
高效过滤 :ECU的CAN硬件可以通过ID过滤器,只接收发给自己的请求(ID=
0x701),大大减轻CPU处理无关报文的中断负担。 -
明确溯源 :诊断仪只需看响应报文的ID(如
0x709),就能立即知道是哪个ECU回复的,无需解析响应数据中的地址信息,处理更快速、可靠。 -
标准化与隔离:为每个ECU分配独立的ID空间,符合Autosar等标准架构,也使不同供应商的ECU集成更简单。
总结
-
0x709/70A/70B是ECU的"回信签名"或"说话时的自称" ,用于在广播式的CAN总线上表明"这句话是谁说的"。 -
诊断仪通过同时监听所有已知ECU的"回信签名",来准确、高效地接收来自不同ECU的响应。
-
这样设计,不是为了对应多个诊断仪 ,而是为了让一个诊断仪 能够清晰、无冲突、高效率地与多个ECU在一个共享的、广播式的网络中进行可靠对话。
所以,您的图中,诊断仪就像一个总机接线员,它知道:
-
要呼叫ECU A,就拨
0x701。 -
之后,它会留意来电显示是
0x709的电话,那一定是ECU A打回来的。
4.物理寻址&功能寻址
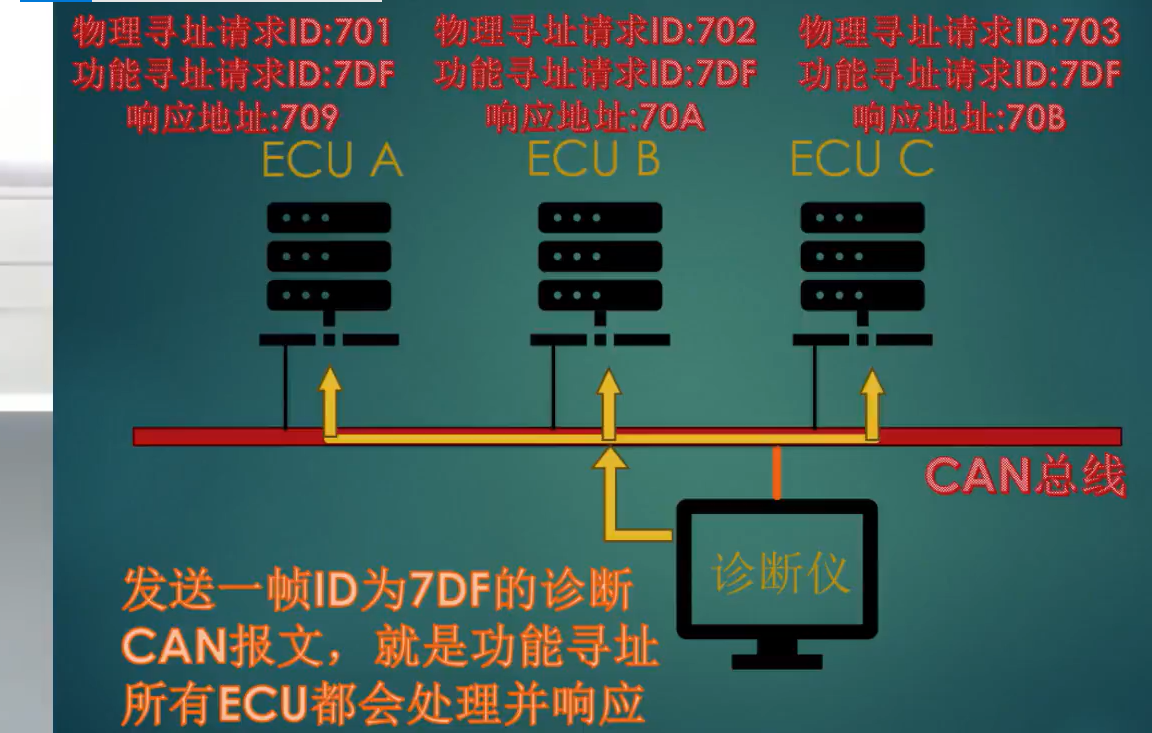
| 特性 | 物理寻址 (Physical Addressing) | 功能寻址 (Functional Addressing) |
|---|---|---|
| 本质 | "一对一"私聊 | "一对多"群发 |
| 目标 | 唯一的、特定的ECU | 一组满足条件的ECU(通常是全部) |
| CAN ID | 目标ECU唯一的物理请求ID (如 0x701) |
通用的功能地址 (如 0x7DF) |
| 响应ID | 目标ECU唯一的物理响应ID (如 0x709) |
各ECU用自己的物理响应ID回复 |
| 通信关系 | 点对点 | 广播 |
| 主要用途 | 针对特定ECU的诊断、刷写、标定 | 全局控制、批量读取、功能发现 |
| 类比 | 打电话给张三(有他的手机号) | 在学校广播里喊:"所有三年级同学集合!" |
在一个完整的诊断流程中,两者经常协同使用:
场景:准备为ECU A刷写软件
-
步骤1(功能寻址) :诊断仪发送
0x7DF[28 01 03],命令所有ECU(除编程会话中的A)静默通信。 -
步骤2(物理寻址) :诊断仪发送
0x701[10 02],命令特定的ECU A进入编程会话。 -
步骤3(物理寻址) :诊断仪持续与
0x701通信,向ECU A发送刷写数据 (0x34,0x36服务)。 -
步骤4(功能寻址) :刷写完成,诊断仪发送
0x7DF[28 01 00],命令所有ECU恢复正常通信。
5.面试考点
现在需要通过UDS诊断升级某一ECU,要暂停其他所有ECU的网络通信,可以怎么做?
要给总线上所有ECU(除当前需要升级的ECU以外)发送28服务(用功能寻址)。也就是用诊断仪发送一帧ID为7DF的28服务的诊断请求报文,这样总线上所有ECU都会停止网络通信了。
核心原理:功能寻址 + 诊断服务权限
1. 功能寻址 (Functional Addressing)
-
当诊断仪发送目标ID为
0x7DF的报文时,总线上所有支持功能寻址的ECU都会接收并处理这条请求 ,无论它们各自的物理地址(0x701,0x702等)是什么。 -
这就像是老师在教室里喊:"所有同学请注意!" 而不是点某一个人的名字。
2. 28服务:CommunicationControl(通信控制)
-
这是一个UDS标准服务,允许诊断仪临时控制ECU的非诊断类通信行为。
-
它有一个关键子功能:
0x01- suppressPositiveResponseMessage (抑制肯定响应消息) 。这意味着当ECU收到这个请求时,它被要求保持沉默,不发送任何肯定响应。这是为了避免所有ECU同时响应造成总线瘫痪。 -
它的关键参数是
controlType(控制类型):-
0x00- enableRxAndTx: 恢复正常通信(开启接收和发送)。 -
01- enableRxAndDisableTx : 允许接收,但禁止发送(最常用)。 -
02- disableRxAndEnableTx`: 禁止接收,但允许发送(极少用)。 -
03- disableRxAndTx : 禁止接收和发送(即"禁言")。
-
3.目标ECU (ECU A) 的特殊处理
目标ECU A 也收到了这条广播命令。但因为在刷写流程中,它即将或已经切换到"编程会话" 。
* 在编程会话下,ECU的行为是预定义的:它只响应物理寻址的诊断请求 (尤其是来自诊断仪的下载0x34、传输0x36等刷写服务),并自动忽略功能寻址的0x28服务 ,或者该服务在编程会话下被配置为无效。
* 因此,ECU A不会执行这个"禁言令",它会继续保持与诊断仪的通信,准备接收刷写数据。
四、具体服务
4.1 10服务
10服务 是UDS中最基础、最核心的服务之一。它的核心功能是控制ECU(电子控制单元)内部的诊断状态 ,即切换不同的"诊断会话"。
你可以把"诊断会话"想象成ECU的不同工作模式。每个模式解锁不同等级的功能和权限。10服务就是用来在这些模式间切换的"钥匙"。
4.1.1 会话分类
1. 标准会话
这是诊断会话的基础分类。
-
默认会话(Default Session, 0x01):
-
状态 :ECU上电后自动进入的模式。
-
功能 :在此模式下,只能执行最基本、安全的诊断服务,如读取故障码(19服务)、读取数据(22服务)等。无法执行写入、编程等具有潜在风险的操作。
-
目的:保证ECU在车辆正常运行时的安全性和稳定性。
-
-
非默认会话(Non-default Session):
-
需要主动通过10服务请求才能进入的模式。主要包含:
-
扩展会话(Extended Session, 0x03):
-
解锁更多诊断功能,例如写入数据(2E服务)、控制输入输出(2F服务)等。
-
是进入更高级会话(如编程会话)的必经之路。
-
-
编程会话(Programming Session, 0x02):
-
用于执行ECU软件/固件刷写(编程)的特殊模式。
-
前提:必须先进入扩展会话(0x03),然后再切换到编程会话(0x02)。这是为了增加一层安全检查,防止误操作。
-
-
-
-
自定义会话:
- 正如你图片中第一行所注,ECU制造商可以自定义额外的会话(例如,0x40-0x5F),用于特定的测试、标定或工厂模式,提供更特殊的权限。
会话切换流程 :
ECU上电 → 默认会话 (0x01) → [10 03] → 扩展会话 (0x03) → [10 02] → 编程会话 (0x02)
4.1.2 会话超时
会话超时是UDS中一个非常重要的安全机制。
-
什么是会话超时?
-
当ECU处于非默认会话 (如扩展会话、编程会话)时,如果在一段规定的时间内没有收到任何诊断请求 ,ECU会自动退回到默认会话(0x01)。
-
这个规定的时间就是会话超时时间。
-
-
为什么需要超时机制?
-
安全性:防止诊断工具异常退出或通信中断后,ECU长期处于高权限模式,从而带来安全风险(如被恶意利用)。
-
资源管理:非默认会话可能占用更多内存或CPU资源,超时机制有助于释放这些资源。
-
-
超时时间的管理
-
超时时间通常由ECU制造商定义,并写入诊断规范。
-
3E服务(Tester Present,诊断仪保持连接) 就是专门用于重置和保持这个超时计时器的。诊断工具需要定期发送3E服务(如每隔几秒),以告知ECU"我还在",从而维持当前的非默认会话状态。
-
最大超时时间指的是ECU允许的最长无通信时间,超过此时间,强制退回默认会话。
-
4.1.3 10服务请求与响应格式
请求(诊断仪 → ECU):
10 [Session Type]肯定响应(ECU → 诊断仪):
50 [Session Type] [P2 Server Max] [P2* Server Max]例如:50 03 32 64
-
50: 10服务 + 0x40(肯定响应标识)。 -
03: 当前成功进入的会话类型。 -
32 64: 通常是两个时间参数(单位一般为毫秒),用于告诉诊断仪P2服务器最大响应时间 和P2*服务器最大响应时间(在编程会话下)。诊断工具会根据这些时间来调整等待响应的超时设置。
否定响应:
如果切换失败(如请求直接进入编程会话但未先进入扩展会话),ECU会回复以7F开头的否定响应码,例如7F 10 22(条件不正确)。
4.1.4 P2 Server Max 和 P2 Server Max*
1. P2 Server Max
-
定义 :当ECU对上一个诊断请求的肯定响应已经发出 后,到它准备好接收下一个新请求 所需的最大时间。
-
通俗解释 :"我(ECU)刚回答完你一个问题,我的大脑需要稍微整理一下,请你至少等待
P2 Server Max这么久之后,再问我下一个问题。如果我还没准备好,你提前问了,我可能无法正确处理。" -
主要目的:保护ECU,防止诊断仪在ECU内部状态未就绪时连续发送请求,导致ECU过载或响应错误。
2. P2* Server Max
-
定义 :当ECU收到一个请求后,到它必须发出对应的肯定或否定响应 所需的最大时间。
-
通俗解释 :"你(诊断仪)问我任何一个问题,我保证在
P2* Server Max这段时间内,一定会给你一个明确的答复(成功或失败)。请你耐心等待这么久,不要认为我死机了。" -
主要目的 :给诊断仪一个明确的响应超时等待时间 。诊断仪发送请求后,会启动一个计时器,时长设为
P2* Server Max。如果在此时间内未收到响应,诊断仪就会判定为超时(Timeout),认为通信失败。
例子:
诊断仪发送 10 02 请求进入编程会话。
ECU肯定响应:50 02 00 C8 05 DC
-
50: 肯定响应 -
02: 已进入编程会话 -
00 C8:P2 Server Max= 0x00C8 = 200毫秒 -
05 DC:P2* Server Max= 0x05DC = 1500毫秒
这意味着诊断工具知道:
-
在这个编程会话下,ECU处理完一个请求后,需要最多200毫秒来准备接收下一个。
-
在这个编程会话下,对任何请求的响应,最多可能需要等待1500毫秒。因此,诊断工具必须将自己的响应超时阈值调整为至少1500毫秒,否则会误报超时错误。
总结
-
P2 Server Max : 请求间间隔时间。告诉诊断仪"发完一个请求后,请间隔这么久再发下一个"。
-
*P2 Server Max**: 请求响应超时时间。告诉诊断仪"问我问题后,请等我这么久,我肯定会回答"。
-
它们在 10服务响应 中提供,其值随诊断会话的变化而变化(通常是编程会话下值最大)。
-
诊断工具必须根据这些值来动态调整其通信时序和超时设置,这是实现鲁棒性UDS通信的关键。
-
它们与会话超时(S3) 是完全不同维度的两个概念,共同构成了UDS协议的双重超时管理机制。
4.2 0x27服务
27服务(SecurityAccess) ,是一个专门用于安全访问的服务。你可以把它理解为ECU(电子控制单元,即车载电脑)的一道"安全锁"。
它的核心作用是保护ECU内部关键的、或者涉及安全和排放的数据与功能,防止未授权的诊断设备(如第三方诊断仪)进行非法读取或篡改。例如,固件刷写、防盗匹配等高风险操作,通常都需要先通过27服务的身份验证。
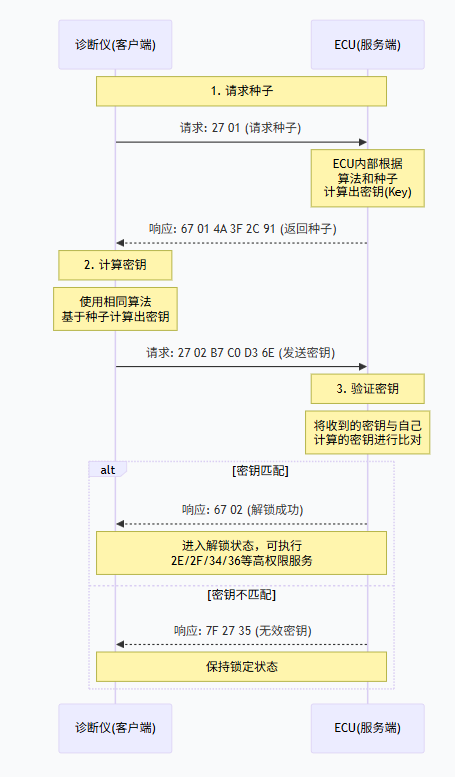
4.2.1 工作原理:"种子-密钥"机制
详细步骤拆解:
-
请求种子 (Request Seed) :诊断仪发送
27 01请求种子。这里的01是子功能,代表请求种子 。不同的奇数子功能(如 01, 03, 05)代表不同的安全等级。 -
生成并返回种子 :ECU收到请求后,会内部算法随机生成一串数据(种子,Seed) ,例如
4A 3F 2C 91,然后回复67 01 4A 3F 2C 91。同时,ECU内部也会用同样的种子,通过保密的Seed-Key算法计算出正确的密钥(Key)。 -
计算并发送密钥 :诊断仪收到种子后,必须使用与ECU完全相同的、保密的Seed-Key算法 ,基于收到的种子计算出密钥(Key),例如
B7 C0 D3 6E,然后发送27 02 B7 C0 D3 6E。这里的02是偶数子功能,代表发送密钥 ,并且必须与请求种子时的奇数子功能(01)对应。 -
验证密钥并解锁 :ECU将收到的密钥与自己内部计算出的密钥进行比较。如果两者一致 ,则ECU返回
67 02表示解锁成功;否则会返回否定响应码(NRC,否定响应代码),解锁失败。
📋 关键规则
-
安全等级独立 :不同安全等级(如
01/02和03/04)通常是独立的,解锁了高等级不代表低等级也自动解锁。 -
锁定与解锁 :ECU上电后默认处于锁定状态 。成功执行27服务后变为解锁状态,才能进行后续的高权限操作。
-
防暴力破解 :为防止暴力破解,ECU有安全策略。例如,连续多次输入错误密钥,ECU会返回NRC
0x36(超过尝试次数),并进入一段时间的延时锁定 ,期间任何安全访问请求都会回复NRC0x37(要求延时)。
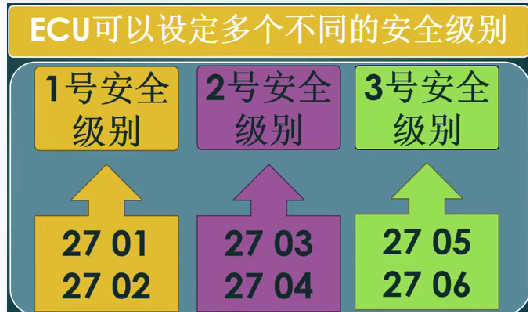
4.2.2 27服务的安全级别
(1)安全等级的真实含义
在UDS(统一诊断服务)中,27服务是为了保护ECU(电子控制单元)中不同安全级别的数据和功能而设计的。不同的安全等级对应不同的权限,例如:
-
一个等级可能只允许读取车辆识别码(VIN)等敏感数据。
-
另一个更高的等级可能才允许写入数据,如进行固件刷写或参数标定
(2)子功能:安全等级的"身份证"
在27服务的请求中,是通过子功能来指定要操作哪个安全等级的。
-
请求种子 :使用奇数 子功能,如
0x01,0x03,0x05... -
发送密钥 :使用对应的偶数 子功能,如
0x02,0x04,0x06...
0x01和0x02、0x03和0x04......这样奇偶成对出现的子功能,就定义了一个独立的安全等级。例如:
-
安全等级A:由
27 01(请求种子)和27 02(发送密钥)定义。 -
安全等级B:由
27 03(请求种子)和27 04(发送密钥)定义。
数字01、03仅仅是一个ID,用于区分不同的安全等级。ECU制造商可以自由定义这些等级,编号是任意的,不带有层级关系。
(3)重要规则
-
独立解锁 :每个安全等级是独立的。解锁了等级
01/02并不意味着自动解锁等级03/04。如果需要更高权限,必须再次执行对应安全等级(如03/04)的握手流程。 -
单一活跃 :在任何时刻,ECU中有且只有一个安全等级可以处于解锁状态。当成功解锁一个新等级时,之前已解锁的等级会被自动锁定。
-
状态依赖:ECU上电后默认所有等级均处于锁定状态。此外,27服务通常需要在非默认会话(如扩展会话或编程会话)下才能使用,在默认会话中是不支持的。
4.2.3 否定响应码NRC
当解锁失败时,ECU会返回7F 27开头并跟一个NRC,常见的错误码有:
-
0x12:子服务不支持 -
0x13:报文长度错误 -
0x22:条件不满足 -
0x24:请求顺序错误 -
0x35:密钥无效 (最常见) -
0x36:超过最大尝试次数 -
0x37:延时未到,请等待
27服务是UDS诊断中保障ECU安全的核心机制,通过"种子-密钥"的握手协议,有效防止了对车辆核心电子系统的非法操作。
4.3 19服务
4.3.1 核心功能概述
简单来说,19服务能帮你回答以下几个问题:
-
ECU当前或历史上发生过哪些故障?
-
这些故障目前是否还存在?
-
故障发生时,车辆的关键参数(如车速、电压、里程)是什么?
-
某个故障发生过几次?是否已经被确认或"老化"清除?
4.3.2 常用子服务详解
19服务拥有多达28个子功能(Sub-function),其中5个是最常用、最重要的。它们通过不同的子功能参数(Sub-function)来区分。
| 子服务 | 名称 | 功能描述 | 典型应用场景 |
|---|---|---|---|
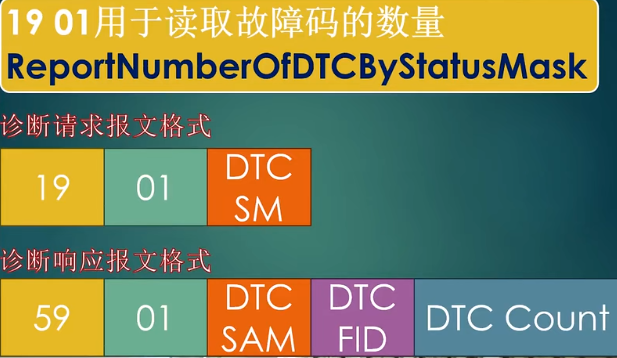
19 01 |
reportNumberOfDTCByStatusMask | 根据状态掩码,返回匹配的DTC数量。 | 快速确认是否有故障,并根据数量决定后续操作。 |
19 02 |
reportDTCByStatusMask | 根据状态掩码,返回所有匹配的DTC列表及其状态。 | 获取当前所有"待处理"或"已确认"的故障码清单。 |
19 04 |
reportDTCSnapshotRecordByDTCNumber | 根据指定的DTC,返回其关联的快照记录。 | 查看某个具体故障发生时记录的冻结帧数据。 |
19 06 |
reportDTCExtDataRecordByDTCNumber | 根据指定的DTC,返回其关联的扩展数据记录。 | 获取故障发生的次数、老化计数器等额外信息。 |
19 0A |
reportSupportedDTC | 返回ECU支持的所有DTC及其当前状态。 | 在开发或测试阶段,验证ECU支持的DTC列表是否完整。 |
4.3.3 DTC状态位 (Status of DTC)
在19服务的响应中,每个DTC都会附带一个1字节的状态位,用于精确描述该DTC的生命周期状态。这8个bit的含义如下:
| Bit位 | 名称 | 含义解释 |
|---|---|---|
| bit 0 | testFailed | 最近一次测试结果为失败(即当前存在故障)。 |
| bit 1 | testFailedThisOperationCycle | 在当前操作循环(如本次点火周期)中,测试曾失败过。 |
| bit 2 | pendingDTC | 待处理故障。在当前或上个操作循环中检测到故障,但尚未确认。 |
| bit 3 | confirmedDTC | 已确认故障。故障已被存储到非易失性存储器中(历史故障)。 |
| bit 4 | testNotCompletedSinceLastClear | 自上次清除后,针对该DTC的测试尚未完成。 |
| bit 5 | testFailedSinceLastClear | 自上次清除后,该DTC测试至少失败过一次。 |
| bit 6 | testNotCompletedThisOperationCycle | 在当前操作循环中,针对该DTC的测试尚未完成。 |
| bit 7 | warningIndicatorRequested | 该DTC请求点亮警告指示灯(如发动机故障灯MIL)。 |
4.3.4 报文格式与实例
(1) 请求格式示例
以最常用的 19 02 为例,请求读取所有当前确认的故障码:
请求报文 :19 02 09
-
19:服务ID -
02:子功能,reportDTCByStatusMask -
09:状态掩码(二进制0000 1001),代表匹配confirmedDTC(bit3)或testFailed(bit0)为真的DTC。
(2)响应格式示例
假设ECU中存在一个DTC,其16进制表示为0x123456,状态为0x09(bit0和bit3为1,即当前存在的已确认故障)。
肯定响应报文 :59 02 01 02 09 12 34 56 09
-
59:肯定响应ID(19+0x40) -
02:响应的子功能 -
01:DTCStatusAvailabilityMask,表示ECU支持哪些状态位 -
02:DTCFormatIdentifier,表示DTC的格式 -
12 34 56:DTC编号(3字节) -
09:该DTC的状态位
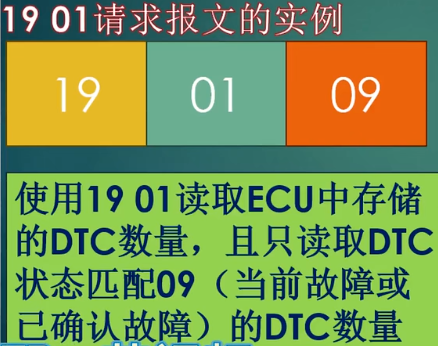
【19 01实例】

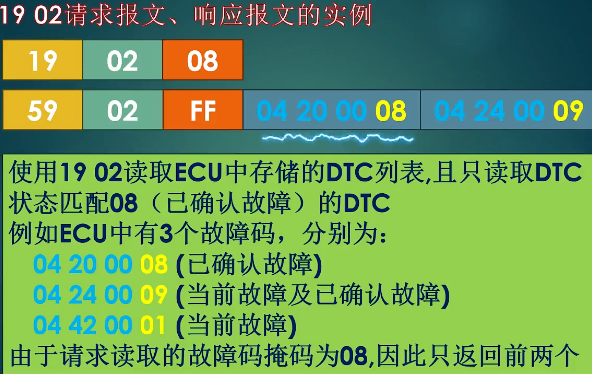
4.3.5 19 02
简单总结:
-
19 02 08:读取已确认故障 (状态掩码08→confirmedDTC= 1) -
19 02 09:读取当前或历史故障 (状态掩码09→confirmedDTC= 1 或testFailed= 1)
4.4 UDS报文传输的四种帧

CAN协议中的数据帧

单帧传输 --- 少量字节的UDS报文(一帧CAN报文容纳得下)
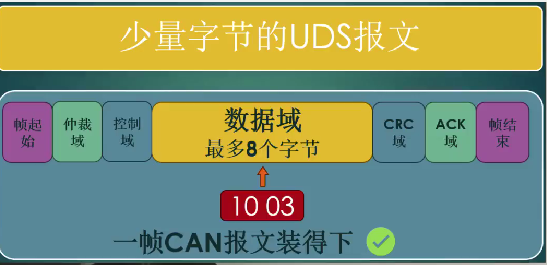
多帧传输 ---大量字节的UDS报文(一帧CAN报文容纳不下)
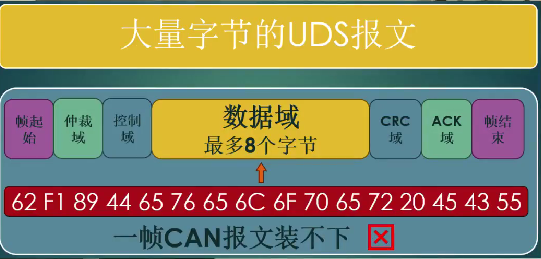
ISO-15765-2 协议规定了基于CAN总线进行UDS报文传输的细节(包括四种帧)。
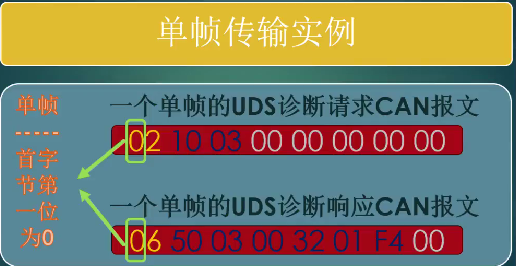
4.4.1 单帧传输
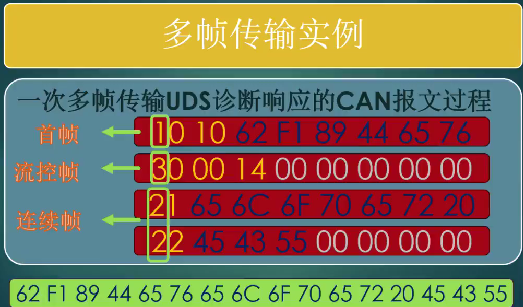
4.4.2 多帧传输
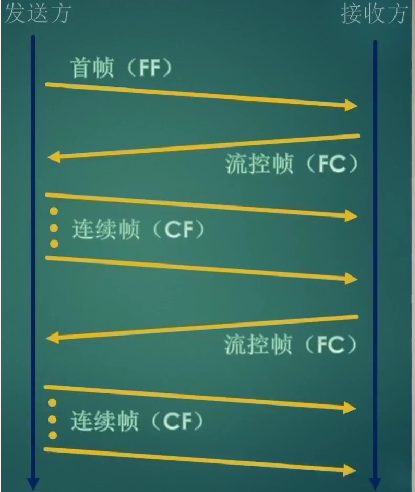
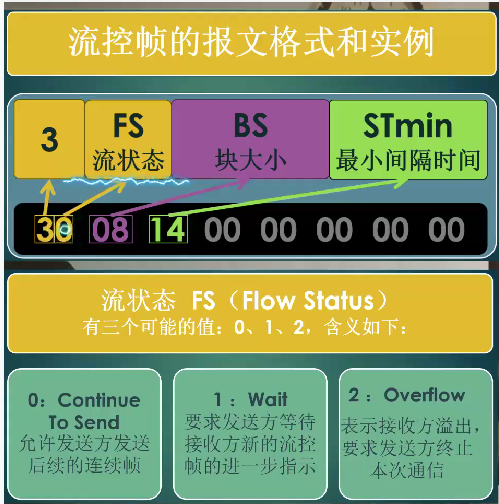
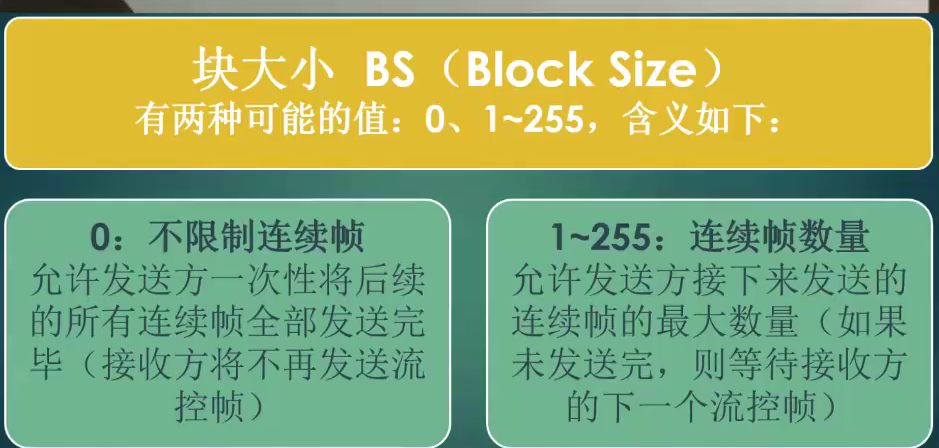
4.4.3 流控帧
五、诊断故障码
五位码 (如 P0420) :主要用于 OBD-II 诊断 ,遵循SAE J2012 / ISO 15031-6标准。它是为了满足法规(如排放法规)而必须公开的标准化故障码。不同品牌的车,同一个 P0420 含义几乎完全相同。
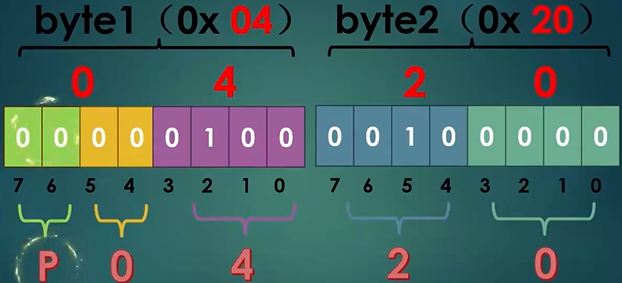
诊断仪读取"五位故障码":

【逐位详细拆解】
按照 ISO 15031-6 标准,P0420 可以拆解为:
| 字符位置 | 值 | 类型 | 含义解读 |
|---|---|---|---|
| 第一位 | P | 系统 (System) | 动力总成 (Powertrain)。表示这是一个与发动机、变速箱及其相关传感器(如氧传感器)有关的故障。 |
| 第二位 | 0 | 类型 (Type) | ISO/SAE 标准化故障。这是一个全球统一的、标准化的故障码,所有品牌的车辆定义基本一致。如果是"1",则代表是制造商自定义的特殊故障码。 |
| 第三位 | 4 | 子系统 (Subsystem) | 辅助排放控制 。在P码中,数字"4"通常指向与排放系统相关的辅助部分。具体到P0420,它明确指向了催化剂系统。 |
| 第四、五位 | 20 | 具体故障 | 标识具体的故障模式 。对于催化剂系统,"20"这个组合代表的含义是系统效率低于阈值。 |
5.1 五位故障码的格式
P0420拆解:
-
第一位:字符 (系统) - 标识故障所属的系统大类。
-
P (Power train):动力总成 (发动机、变速箱等)。
-
C (Chassis):底盘 (ABS、ESP等)。
-
B (Body):车身 (车门、空调、气囊等)。
-
U (Network):网络通信。
-
-
第二位:数字 (类型) - 标识故障码的标准化程度。
-
0 :ISO/SAE 标准化定义的故障码。
-
1 :OEM 自定义的故障码。
-
-
第三位:字符 (子系统) - 标识故障发生的具体子系统
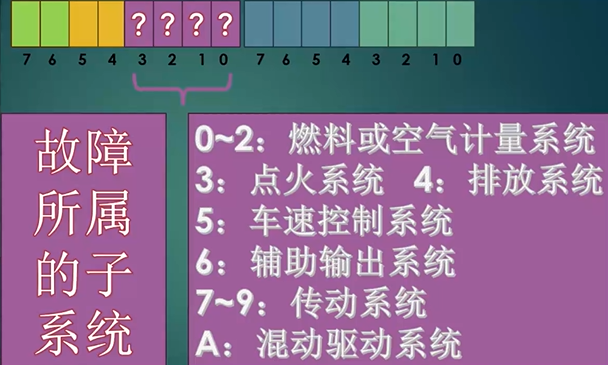
-
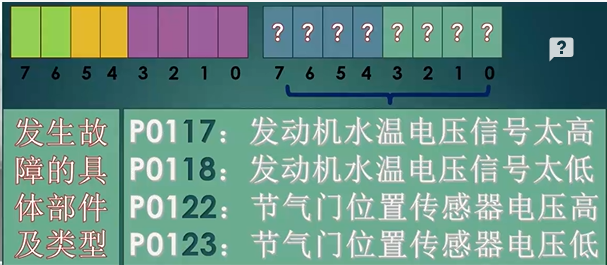
第四、五位:数字 (具体故障) - 标识具体的故障模式 (如:02-信号范围/性能问题,11-短路到地等)。
5.2 UDS的三字节故障码
三字节码 (如 0xC0FFEE) :主要用于 UDS 诊断 ,遵循 ISO 14229-1标准。它是 ECU 内部开发和售后深度诊断使用的内部故障码 。每个字节的含义由汽车制造商自定义,通常承载了更丰富、更具体的信息。
简单来说,OBD码是"通用语言",用于法规和通用诊断;UDS三字节码是"内部语言",用于深入开发和故障分析。
【OBD故障码与UDS故障码的关系】
UDS三字节故障码的前两个字节通常就是OBD诊断的五字节故障码。

5.2.1 故障类型FTB

5.2.2 UDS故障码状态位

19 服务返回的 DTC 旁边,总会跟着一个 状态字节 (Status Byte),这与之前介绍的 OBD 状态位含义一致。它描述了该 DTC 的生命周期状态。
例如,读取到一个三字节码 01 21 05 时,还会读到一个状态字节 0x09 (二进制 0000 1001),含义如下:
-
Bit 0= 1 (当前故障存在) -
Bit 3= 1 (这是一个已确认的故障) -
这意味着:"当前确实存在一个对地短路的故障,并且这个故障已经被确认了。"
